Das könnte Ihnen auch gefallen
- NUMERICAL SOLUTION OF STOCHASTIC DIFFERENTIAL EQUATIONSDokument44 SeitenNUMERICAL SOLUTION OF STOCHASTIC DIFFERENTIAL EQUATIONSSaul Diaz InfanteNoch keine Bewertungen
- Optimization Class Notes MTH-9842Dokument25 SeitenOptimization Class Notes MTH-9842felix.apfaltrer7766Noch keine Bewertungen
- Pure Birth ProcessesDokument13 SeitenPure Birth ProcessesDaniel Mwaniki100% (1)
- Inequalities for Differential and Integral EquationsVon EverandInequalities for Differential and Integral EquationsNoch keine Bewertungen
- Numerical Methods for Two-Point Boundary-Value ProblemsVon EverandNumerical Methods for Two-Point Boundary-Value ProblemsNoch keine Bewertungen
- Solution Manual For Signals and Systems Using Matlab Luis F. ChaparroDokument582 SeitenSolution Manual For Signals and Systems Using Matlab Luis F. Chaparro김정훈Noch keine Bewertungen
- Project 3 - CFDDokument2 SeitenProject 3 - CFDSrivatsan SampathNoch keine Bewertungen
- ECE-R09 Syllabus, 26.07.2012Dokument85 SeitenECE-R09 Syllabus, 26.07.2012appuamreddyNoch keine Bewertungen
- Direct Numerical Integration MethodsDokument19 SeitenDirect Numerical Integration MethodsallentvmNoch keine Bewertungen
- Dynamical Systems Method for Solving Nonlinear Operator EquationsVon EverandDynamical Systems Method for Solving Nonlinear Operator EquationsBewertung: 5 von 5 Sternen5/5 (1)
- Nonlinear Dynamic in Engineering by Akbari-Ganji’S MethodVon EverandNonlinear Dynamic in Engineering by Akbari-Ganji’S MethodNoch keine Bewertungen
- Comparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsDokument3 SeitenComparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsEditor IJTSRDNoch keine Bewertungen
- Discretization MethodsDokument32 SeitenDiscretization MethodsHari SimhaNoch keine Bewertungen
- Numerical Methods For Elliptic EquationsDokument12 SeitenNumerical Methods For Elliptic Equationsatb2215Noch keine Bewertungen
- Numerical Simulation of The Navier Stoke EquationDokument18 SeitenNumerical Simulation of The Navier Stoke EquationLitan Kumar SahaNoch keine Bewertungen
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsDokument11 SeitenNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalNoch keine Bewertungen
- Programming & Numerical Analysis: Kai-Feng ChenDokument40 SeitenProgramming & Numerical Analysis: Kai-Feng ChenKingsley Etornam AnkuNoch keine Bewertungen
- Newton Gauss MethodDokument37 SeitenNewton Gauss MethodLucas WeaverNoch keine Bewertungen
- PdeDokument146 SeitenPdeKarthick SureshNoch keine Bewertungen
- Interpolation and Extrapolation ExplainedDokument16 SeitenInterpolation and Extrapolation Explainedabdul latifNoch keine Bewertungen
- Weber Arfken Mathematical Methods For Physicists CH 5 Selected Solutions PDFDokument6 SeitenWeber Arfken Mathematical Methods For Physicists CH 5 Selected Solutions PDFUrielGranadosNoch keine Bewertungen
- Numerical Solutions of Stiff Initial Value Problems Using Modified Extended Backward Differentiation FormulaDokument4 SeitenNumerical Solutions of Stiff Initial Value Problems Using Modified Extended Backward Differentiation FormulaInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Numerical Methods for Simulation and Data AnalysisDokument6 SeitenNumerical Methods for Simulation and Data Analysissumit_raisedNoch keine Bewertungen
- Atkinson - Resources in Numerical AnalysisDokument25 SeitenAtkinson - Resources in Numerical Analysiscool_gardens20074304Noch keine Bewertungen
- Pde CaracteristicasDokument26 SeitenPde CaracteristicasAnonymous Vd26Pzpx80Noch keine Bewertungen
- Difference EquationDokument22 SeitenDifference EquationWeijie ChenNoch keine Bewertungen
- The Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Dokument10 SeitenThe Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Rakesh James100% (1)
- Partial Differential EqnDokument125 SeitenPartial Differential Eqne076016Noch keine Bewertungen
- Finite Element Method Solver for Poisson's EquationDokument4 SeitenFinite Element Method Solver for Poisson's EquationRizwan SamorNoch keine Bewertungen
- The Finite Element Method For 2D Problems: Theorem 9.1Dokument47 SeitenThe Finite Element Method For 2D Problems: Theorem 9.1Anita RahmawatiNoch keine Bewertungen
- Unit 4: Linear Transformation: V T U T V U T U CT Cu TDokument28 SeitenUnit 4: Linear Transformation: V T U T V U T U CT Cu TFITSUM SEIDNoch keine Bewertungen
- An Introduction To Numerical Methods For The Solutions of Partial Differential EquationsDokument12 SeitenAn Introduction To Numerical Methods For The Solutions of Partial Differential EquationseiroNoch keine Bewertungen
- Basic of Finite Difference MethodDokument7 SeitenBasic of Finite Difference MethodpoliskarmaNoch keine Bewertungen
- Example of Hessenberg ReductionDokument21 SeitenExample of Hessenberg ReductionMohammad Umar RehmanNoch keine Bewertungen
- Ex4 Tutorial - Forward and Back-PropagationDokument20 SeitenEx4 Tutorial - Forward and Back-PropagationAnandNoch keine Bewertungen
- Metric SpacesDokument21 SeitenMetric SpacesaaronbjarkeNoch keine Bewertungen
- NumericalIntegration PDFDokument17 SeitenNumericalIntegration PDFAshok Kumar KNoch keine Bewertungen
- Numerical Analysis SolutionDokument19 SeitenNumerical Analysis SolutionPradip AdhikariNoch keine Bewertungen
- D Alembert SolutionDokument22 SeitenD Alembert SolutionDharmendra Kumar0% (1)
- Hardy Spaces Lecture Notes 1Dokument62 SeitenHardy Spaces Lecture Notes 1Valdrick100% (1)
- hw10 (Do Carmo p.260 Q1 - Sol) PDFDokument2 Seitenhw10 (Do Carmo p.260 Q1 - Sol) PDFjulianli0220Noch keine Bewertungen
- Least Square Equation SolvingDokument22 SeitenLeast Square Equation Solvingnguyen_anh_126Noch keine Bewertungen
- NUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSDokument32 SeitenNUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSmitch_g_101Noch keine Bewertungen
- Lecture 2 Numeric Solution of Differential EquationsDokument45 SeitenLecture 2 Numeric Solution of Differential EquationsManuelNoch keine Bewertungen
- Stochastic Processes NotesDokument22 SeitenStochastic Processes Notesels_872100% (1)
- Math 138 Functional Analysis Notes PDFDokument159 SeitenMath 138 Functional Analysis Notes PDFAidan HolwerdaNoch keine Bewertungen
- Partial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Dokument128 SeitenPartial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Franklin feelNoch keine Bewertungen
- Finite Difference Method for Solving Boundary Value ProblemsDokument10 SeitenFinite Difference Method for Solving Boundary Value ProblemsYen PengNoch keine Bewertungen
- Support Vector Machines in R: A Comparison of PackagesDokument28 SeitenSupport Vector Machines in R: A Comparison of PackageszhaozilongNoch keine Bewertungen
- Derivation of the normal form for the Hopf bifurcationDokument3 SeitenDerivation of the normal form for the Hopf bifurcationJohnv13100% (2)
- Principle of The Fast Fourier TransformDokument14 SeitenPrinciple of The Fast Fourier TransformRajib SharmaNoch keine Bewertungen
- MIT Numerical PDEDokument119 SeitenMIT Numerical PDEKruger JoeNoch keine Bewertungen
- Circular Tank Radius CalculationDokument25 SeitenCircular Tank Radius CalculationQamar AbbasNoch keine Bewertungen
- InterpolationDokument13 SeitenInterpolationEr Aamir MaqboolNoch keine Bewertungen
- Difference EquationsDokument120 SeitenDifference EquationsGeorge MSenoir100% (1)
- Molecular Simulation TechniquesDokument146 SeitenMolecular Simulation Techniquesthamaraikannan100% (1)
- Numerical Solutions of Differential EquationsDokument251 SeitenNumerical Solutions of Differential EquationsAmine AbfNoch keine Bewertungen
- Partial Differential Equation of Parabolic TypeDokument15 SeitenPartial Differential Equation of Parabolic TypeDionysios Zelios100% (1)
- Numerical Solution of Differential EquationsDokument17 SeitenNumerical Solution of Differential Equationsmohammed tahaNoch keine Bewertungen
- Analysis2011 PDFDokument235 SeitenAnalysis2011 PDFMirica Mihai AntonioNoch keine Bewertungen
- Introduction to the Theory of Linear Partial Differential EquationsVon EverandIntroduction to the Theory of Linear Partial Differential EquationsNoch keine Bewertungen
- 27 WingDokument1 Seite27 WingZaeem KhanNoch keine Bewertungen
- Tutorial XFLR5Dokument52 SeitenTutorial XFLR5Talita Silva75% (4)
- NI 9375 For WDTDokument20 SeitenNI 9375 For WDTZaeem KhanNoch keine Bewertungen
- Stories of The ProphetsDokument183 SeitenStories of The Prophetspapa_terakhirNoch keine Bewertungen
- Tutorial XFLR5Dokument52 SeitenTutorial XFLR5Talita Silva75% (4)
- Football Teams ManagmenetDokument32 SeitenFootball Teams Managmenetkuwaiti27Noch keine Bewertungen
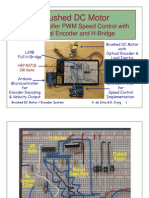
- Brushed DC Motor Speed Control with Encoder and H-BridgeDokument50 SeitenBrushed DC Motor Speed Control with Encoder and H-BridgeMohammed Benlamlih100% (7)
- Great Minds ThinkDokument16 SeitenGreat Minds ThinkdnudnuNoch keine Bewertungen
- Providing education for all in MichiganDokument13 SeitenProviding education for all in MichiganZaeem KhanNoch keine Bewertungen
- TensairityDokument5 SeitenTensairityZaeem KhanNoch keine Bewertungen
- State Machines Hands-On Exercises LabViewDokument19 SeitenState Machines Hands-On Exercises LabViewJorge Roman SantosNoch keine Bewertungen
- Tethered Kiteplane DesignDokument6 SeitenTethered Kiteplane DesignZaeem KhanNoch keine Bewertungen
- DrakeDokument45 SeitenDrakeAngel Freddy Ganazhapa MallaNoch keine Bewertungen
- Gilens and Page - Testing Theories of American PoliticsDokument18 SeitenGilens and Page - Testing Theories of American PoliticsCedric ZhouNoch keine Bewertungen
- FFT BasicsDokument8 SeitenFFT BasicsZaeem KhanNoch keine Bewertungen
- DataflowDokument1 SeiteDataflowZaeem KhanNoch keine Bewertungen
- 2012 Olin College Design ReportDokument32 Seiten2012 Olin College Design ReportZaeem KhanNoch keine Bewertungen
- The Signs Before The Day of Judgment by Ibn KathirDokument69 SeitenThe Signs Before The Day of Judgment by Ibn Kathirislamiq100% (10)
- Report - Wind Turbine Rotor OptimizationDokument27 SeitenReport - Wind Turbine Rotor OptimizationZaeem KhanNoch keine Bewertungen
- DrakeDokument45 SeitenDrakeAngel Freddy Ganazhapa MallaNoch keine Bewertungen
- Finite Element Method: January 12, 2004Dokument26 SeitenFinite Element Method: January 12, 2004happyshamu100% (1)
- Finite Element Method: January 12, 2004Dokument26 SeitenFinite Element Method: January 12, 2004happyshamu100% (1)
- Finite Element Method: January 12, 2004Dokument26 SeitenFinite Element Method: January 12, 2004happyshamu100% (1)
- Intro Rotor DynamicsDokument30 SeitenIntro Rotor DynamicsZaeem Khan0% (1)
- Numerical Method For Engineers-Chapter 23Dokument21 SeitenNumerical Method For Engineers-Chapter 23Mrbudakbaek100% (2)
- Computer Oriented Numerical MethodsDokument2 SeitenComputer Oriented Numerical MethodsmaheshNoch keine Bewertungen
- CFD Notes 1-1Dokument26 SeitenCFD Notes 1-1SyEd HiqmathNoch keine Bewertungen
- Finite Diference1 PDFDokument10 SeitenFinite Diference1 PDFsusisoburNoch keine Bewertungen
- Solution of Inverse Diffusion Problems in ExcelDokument4 SeitenSolution of Inverse Diffusion Problems in ExcelrodwellheadNoch keine Bewertungen
- TSE Using Matrices Rev2Dokument7 SeitenTSE Using Matrices Rev2Bouhadjar MeguenniNoch keine Bewertungen
- Affiliated Institutions Anna University of Technology Chennai:: Chennai 600 113 Curriculum 2010Dokument17 SeitenAffiliated Institutions Anna University of Technology Chennai:: Chennai 600 113 Curriculum 2010RajaRaman.GNoch keine Bewertungen
- Journal of Computational and Applied Mathematics: H.Z. Hassan, A.A. Mohamad, G.E. AtteiaDokument10 SeitenJournal of Computational and Applied Mathematics: H.Z. Hassan, A.A. Mohamad, G.E. AtteiaCarlos VelásquezNoch keine Bewertungen
- Computational Fluid DynamicsDokument22 SeitenComputational Fluid DynamicsSYED HASANNoch keine Bewertungen
- NumericalMethods GDokument39 SeitenNumericalMethods GdwightNoch keine Bewertungen
- Manonmaniam Sundaranar University: B.Sc. Mathematics - Ii YearDokument98 SeitenManonmaniam Sundaranar University: B.Sc. Mathematics - Ii YearSadia ahmadNoch keine Bewertungen
- Computer Oriented Numerical Techniques: BCS-054 IDokument5 SeitenComputer Oriented Numerical Techniques: BCS-054 IyatharthNoch keine Bewertungen
- TestDokument214 SeitenTestRajath BNoch keine Bewertungen
- Dr. R. Ponalagusamy, Professor (HAG), Department of Mathematics, NIT-Trichy Assignment - II Date of Submission: 07-04-2020Dokument2 SeitenDr. R. Ponalagusamy, Professor (HAG), Department of Mathematics, NIT-Trichy Assignment - II Date of Submission: 07-04-2020Chemical NITTNoch keine Bewertungen
- Knowledge/Comprehension/ Application/ Analysis/ Synthesis/Evaluation)Dokument12 SeitenKnowledge/Comprehension/ Application/ Analysis/ Synthesis/Evaluation)G. Somasekhar SomuNoch keine Bewertungen
- The Derivative: ELEC 4333/5333 University of Colorado Denver S. GedneyDokument12 SeitenThe Derivative: ELEC 4333/5333 University of Colorado Denver S. GedneyOmran HagheghNoch keine Bewertungen
- Initial Conditions Initial Value Problem: Boundary Conditions. Differential Equation Boundary ConditionsDokument24 SeitenInitial Conditions Initial Value Problem: Boundary Conditions. Differential Equation Boundary ConditionsRajandra VermaNoch keine Bewertungen
- Finite Differences Operators ExplainedDokument10 SeitenFinite Differences Operators ExplainedLami100% (1)
- USGS Distributed Routing Rainfall-Runoff Model Version IIDokument205 SeitenUSGS Distributed Routing Rainfall-Runoff Model Version IIRobert Marlindo Ramirez QuispeNoch keine Bewertungen
- BSC - Maths - 2012 Syllabus OnwardsDokument63 SeitenBSC - Maths - 2012 Syllabus OnwardsJothi KumarNoch keine Bewertungen
- Newton's Forward Difference FormulaDokument5 SeitenNewton's Forward Difference Formulaahmad hauwauNoch keine Bewertungen
- Mathematics-II Course OverviewDokument5 SeitenMathematics-II Course OverviewAkash GVNoch keine Bewertungen
- Mil HDBK 776Dokument85 SeitenMil HDBK 776dicintraNoch keine Bewertungen
- Numerical Methods Formula MaterialDokument6 SeitenNumerical Methods Formula MaterialDhilip PrabakaranNoch keine Bewertungen
- BSc Math RegulationsDokument37 SeitenBSc Math RegulationsMarikannan GNoch keine Bewertungen
- Unit 12Dokument38 SeitenUnit 12ramonlinebooksNoch keine Bewertungen
- Simulation of transient overvoltages on electric transmission linesDokument14 SeitenSimulation of transient overvoltages on electric transmission linesJosNoch keine Bewertungen