Das könnte Ihnen auch gefallen
- Pier 76 Final Report 10-5-07Dokument51 SeitenPier 76 Final Report 10-5-07ajpchaban100% (1)
- Bryde Et Al (2012) - The Project Benefits of BIM PDFDokument10 SeitenBryde Et Al (2012) - The Project Benefits of BIM PDFSérgio BragaNoch keine Bewertungen
- Protocols for Tracking Information Content in the Existing BIMVon EverandProtocols for Tracking Information Content in the Existing BIMNoch keine Bewertungen
- CpmPert SlideDokument35 SeitenCpmPert SlideSiddharth MohanNoch keine Bewertungen
- Aecukbimprotocol Bimexecutionplan v2 0Dokument13 SeitenAecukbimprotocol Bimexecutionplan v2 0Nghia Huynh NgocNoch keine Bewertungen
- Activity On Node Diagram: A Is The First Step and Precedes - and C (A - , C)Dokument50 SeitenActivity On Node Diagram: A Is The First Step and Precedes - and C (A - , C)limulsa78Noch keine Bewertungen
- AIA ConceptsDokument19 SeitenAIA ConceptsrawmaluNoch keine Bewertungen
- Transport Planning Amp Design ManualDokument142 SeitenTransport Planning Amp Design ManualAmul ShresthaNoch keine Bewertungen
- Project Management TechniquesDokument53 SeitenProject Management Techniquesaditi_apteNoch keine Bewertungen
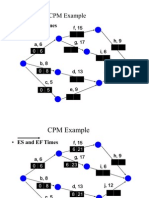
- CPM Example: Y Y Y YDokument27 SeitenCPM Example: Y Y Y Ylimulsa78Noch keine Bewertungen
- Critical Path Analysis: The Objective of Critical Path Analysis Is To Estimate The Total Project DurationDokument35 SeitenCritical Path Analysis: The Objective of Critical Path Analysis Is To Estimate The Total Project Durationlimulsa78Noch keine Bewertungen
- CPM Example: Y Y Y YDokument30 SeitenCPM Example: Y Y Y Ylimulsa78Noch keine Bewertungen
- CEMP Tornagrain TownDokument16 SeitenCEMP Tornagrain TownEmdad YusufNoch keine Bewertungen
- A 23 PertDokument31 SeitenA 23 Pertlimulsa78Noch keine Bewertungen
- Rooftop Gardens-Zipple PDFDokument6 SeitenRooftop Gardens-Zipple PDFEzzadin BabanNoch keine Bewertungen
- A1 Port Pier Condition SurveyDokument10 SeitenA1 Port Pier Condition SurveyYuliar Azmi AdhitamaNoch keine Bewertungen
- Class Handout AS125109 How To Use Dynamo To Visibly Show Navisworks Clashes Into Revit Felix Tan 1Dokument16 SeitenClass Handout AS125109 How To Use Dynamo To Visibly Show Navisworks Clashes Into Revit Felix Tan 1jasolanoroNoch keine Bewertungen
- Garden Rooftop DesignDokument5 SeitenGarden Rooftop DesignBenky JrNoch keine Bewertungen
- For Economic A Strategic Tool: PerspectivesDokument1 SeiteFor Economic A Strategic Tool: Perspectivesangel azurinNoch keine Bewertungen
- Rooftop Garden Gardening Techniques - Design Ideas For The Outdoor ClassroomDokument5 SeitenRooftop Garden Gardening Techniques - Design Ideas For The Outdoor ClassroomBellouChrysanthiNoch keine Bewertungen
- Date Description Details: Farmdesign Release NotesDokument6 SeitenDate Description Details: Farmdesign Release Notesনাজমুল হক শাহিনNoch keine Bewertungen
- PortfolioDokument14 SeitenPortfolioShaNoch keine Bewertungen
- 7.5a - Engineering Drawings, Diagrams & StandardsDokument36 Seiten7.5a - Engineering Drawings, Diagrams & StandardsAslam AwanNoch keine Bewertungen
- Net Work AnalysisDokument23 SeitenNet Work AnalysisJOHN TUMWEBAZENoch keine Bewertungen
- Ackward Pass: Determine Ÿatest Start (Ÿs) and Ÿ Atest Complete (Ÿc) For Each TaskDokument4 SeitenAckward Pass: Determine Ÿatest Start (Ÿs) and Ÿ Atest Complete (Ÿc) For Each Tasklimulsa78Noch keine Bewertungen
- 5950 Part 1-1990Dokument120 Seiten5950 Part 1-1990José Miguel100% (1)
- Essam Amr - Civil Engineer CV4 PDFDokument2 SeitenEssam Amr - Civil Engineer CV4 PDFAnonymous MYWXjWVp9uNoch keine Bewertungen
- Illustration - 3Dokument44 SeitenIllustration - 3limulsa78Noch keine Bewertungen
- Using The Coordination Monitoring Feature in Revit Structure PDFDokument14 SeitenUsing The Coordination Monitoring Feature in Revit Structure PDFJeneish JustusNoch keine Bewertungen
- BIM 403 - BIM and SchedulingDokument47 SeitenBIM 403 - BIM and SchedulingAbhishek PandeyNoch keine Bewertungen
- By Ascent For Review Only and Reuse Strictly Forbidden.: Autocad 2021 Autodesk Certified Professional Exam Topics ReviewDokument55 SeitenBy Ascent For Review Only and Reuse Strictly Forbidden.: Autocad 2021 Autodesk Certified Professional Exam Topics ReviewJhosa OcampoNoch keine Bewertungen
- Modelling, Analysis and Design of A Multi-Story Building by Using Building Information Modelling (BIM) ApproachDokument4 SeitenModelling, Analysis and Design of A Multi-Story Building by Using Building Information Modelling (BIM) ApproachApeksha TambeNoch keine Bewertungen
- Arch. Juan Felipe Solis Portfolio EnglishDokument63 SeitenArch. Juan Felipe Solis Portfolio EnglishJuan Felipe SolisNoch keine Bewertungen
- Package 1. Level 2. Level 3. Level 4. Level Node-Name Image Type Description Instructions Tutorial-Links Comment Last EditDokument21 SeitenPackage 1. Level 2. Level 3. Level 4. Level Node-Name Image Type Description Instructions Tutorial-Links Comment Last EditIgnatius PathulaNoch keine Bewertungen
- Critical Path Analysis: The Following Terms Shall Be Used in The Critical Path CalculationDokument34 SeitenCritical Path Analysis: The Following Terms Shall Be Used in The Critical Path Calculationlimulsa78Noch keine Bewertungen
- The Cic Scope of Services HandbookDokument30 SeitenThe Cic Scope of Services HandbookbariscNoch keine Bewertungen
- Class Presentation BIM128342 Computational BIM Workshop-AdvancedDokument43 SeitenClass Presentation BIM128342 Computational BIM Workshop-AdvancedAman RawatNoch keine Bewertungen
- REQ12 - Review & AdviseDokument45 SeitenREQ12 - Review & AdviseTrang NgoNoch keine Bewertungen
- 1 - HKU LibrariesDokument263 Seiten1 - HKU LibrariesAmul ShresthaNoch keine Bewertungen
- C I C Services ExplainedDokument3 SeitenC I C Services ExplainedchrispittmanNoch keine Bewertungen
- Norwegian Home Builders Association - BIM-manualDokument30 SeitenNorwegian Home Builders Association - BIM-manualKittu RamavatNoch keine Bewertungen
- AB208 3 Autodesk Revit For Urban DesignDokument15 SeitenAB208 3 Autodesk Revit For Urban DesignSergio Moruno SanchezNoch keine Bewertungen
- Assignment RevitDokument3 SeitenAssignment RevitTawfiq MahasnehNoch keine Bewertungen
- Open BIM Protocol: Promoting Coordination Using IFC ModelsDokument17 SeitenOpen BIM Protocol: Promoting Coordination Using IFC ModelsT A WiqasNoch keine Bewertungen
- Https WWW - Archsd.gov - HK Media 11350 E172 PDFDokument236 SeitenHttps WWW - Archsd.gov - HK Media 11350 E172 PDFjackNoch keine Bewertungen
- Handout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureDokument58 SeitenHandout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureKelvinatorNoch keine Bewertungen
- Bim For Industrial Plant DesignDokument28 SeitenBim For Industrial Plant DesignCristian KasbahNoch keine Bewertungen
- 01 BIM in BridgeDesign ThesisDokument83 Seiten01 BIM in BridgeDesign Thesismoderntalking87100% (1)
- CES 148 2015 ES 1991 Part1 7 GeneralDokument61 SeitenCES 148 2015 ES 1991 Part1 7 GeneralHiraNoch keine Bewertungen
- A Guide To Rooftop GardeningDokument41 SeitenA Guide To Rooftop GardeningdantranzNoch keine Bewertungen
- International Home of Openbim: Decision Time in TokyoDokument4 SeitenInternational Home of Openbim: Decision Time in TokyolaurenssenNoch keine Bewertungen
- BIMForum LOD 2018 - Spec Part 1 - and - Guide - PUB DRAFT PDFDokument253 SeitenBIMForum LOD 2018 - Spec Part 1 - and - Guide - PUB DRAFT PDFRobson Ferreira100% (1)
- BIM Thesis NESPAKHOUSE PDFDokument110 SeitenBIM Thesis NESPAKHOUSE PDFzubair-scribdNoch keine Bewertungen
- The Revitizing GuidelineDokument15 SeitenThe Revitizing Guidelinemike wilsonNoch keine Bewertungen
- Maritime Globalpresentation en Jan2020 OptimizedDokument207 SeitenMaritime Globalpresentation en Jan2020 OptimizeddlopezarNoch keine Bewertungen
- Gis & Bim: First Steps To Integrated DataDokument7 SeitenGis & Bim: First Steps To Integrated DataCristian Marcos Ramirez CamposNoch keine Bewertungen
- Aecosin BentleyDokument2 SeitenAecosin BentleyLuiz Amilton SalesNoch keine Bewertungen
- Presentation - 1484 - CI1484 - Route Planning Using Autodesk InfraWorks - A How To Class by Autodesk and CDM SmithDokument66 SeitenPresentation - 1484 - CI1484 - Route Planning Using Autodesk InfraWorks - A How To Class by Autodesk and CDM SmithAbdelkrim JomaaNoch keine Bewertungen
- R.C. Column Design 400 400: All Pass! All Pass!Dokument1 SeiteR.C. Column Design 400 400: All Pass! All Pass!ooiNoch keine Bewertungen
- Guns Ammo - July 20151Dokument20 SeitenGuns Ammo - July 20151ooi100% (4)
- Grand Ion Delemen Hotel, Genting Highlands: Only For Myr 788Dokument2 SeitenGrand Ion Delemen Hotel, Genting Highlands: Only For Myr 788ooiNoch keine Bewertungen
- Road To Ir - 2018Dokument122 SeitenRoad To Ir - 2018ooiNoch keine Bewertungen
- Geo Tech ExplanationDokument12 SeitenGeo Tech ExplanationooiNoch keine Bewertungen
- AutoCAD Shortcuts 11x8.5 MECH-REV PDFDokument11 SeitenAutoCAD Shortcuts 11x8.5 MECH-REV PDFKristijan BorasNoch keine Bewertungen
- 2.2l Ranger Fx4 at PMDokument2 Seiten2.2l Ranger Fx4 at PMooiNoch keine Bewertungen
- 2.2l Ranger XL MT PMDokument2 Seiten2.2l Ranger XL MT PMooiNoch keine Bewertungen
- An Overview of Groundwater Chemistry StuDokument19 SeitenAn Overview of Groundwater Chemistry StuooiNoch keine Bewertungen
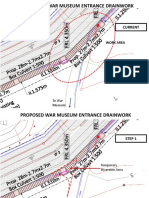
- Proposed War Museum Entrance DrainworkDokument6 SeitenProposed War Museum Entrance DrainworkooiNoch keine Bewertungen
- 03 C3 Portugal Steel IPTDokument93 Seiten03 C3 Portugal Steel IPTooiNoch keine Bewertungen
- IC Workshop Materials 09 - Construction Drawing PracticesDokument43 SeitenIC Workshop Materials 09 - Construction Drawing PracticesooiNoch keine Bewertungen
- Tilt UpDokument87 SeitenTilt UpooiNoch keine Bewertungen
- The InterviewDokument14 SeitenThe InterviewooiNoch keine Bewertungen
- Tower Crane Cop 2006Dokument58 SeitenTower Crane Cop 2006ooi100% (1)