Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Case 580f Tractor Loader Backhoe Operators ManualDokument8 SeitenCase 580f Tractor Loader Backhoe Operators Manualأكرم تيجي100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- BMC HiaceDokument396 SeitenBMC HiaceJerome Maminta100% (1)
- 04-68350A Manual CCN DM01-DI01 PDFDokument47 Seiten04-68350A Manual CCN DM01-DI01 PDFtaha50% (2)
- Eaton Power Distribution Product GuideDokument477 SeitenEaton Power Distribution Product GuideRodrigo Alonso Rosales OrtegaNoch keine Bewertungen
- 4 Channel Relay Controller Board: User GuideDokument11 Seiten4 Channel Relay Controller Board: User GuidehansleybheenuckNoch keine Bewertungen
- Bendi 420S - Parts ManualDokument9 SeitenBendi 420S - Parts Manualjasonpminty1969Noch keine Bewertungen
- Technological University of The PhilippinesDokument2 SeitenTechnological University of The PhilippinesJohn Richard MalongNoch keine Bewertungen
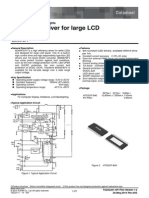
- Bd9397efv e PDFDokument30 SeitenBd9397efv e PDFshafiuddin7326Noch keine Bewertungen
- Axial Piston Variable Pump (A) A10VSO Series 31: AmericasDokument48 SeitenAxial Piston Variable Pump (A) A10VSO Series 31: AmericasPaulo Roberto Ferreira LopesNoch keine Bewertungen
- Parker Pneumatic Sensors PDFDokument25 SeitenParker Pneumatic Sensors PDFyouri59490Noch keine Bewertungen
- Pages From Kubota Z602 Sme3b SeriesDokument1 SeitePages From Kubota Z602 Sme3b SeriesrickescherNoch keine Bewertungen
- Mainline PPR LT.21.DDokument1 SeiteMainline PPR LT.21.DVictor AfandiNoch keine Bewertungen
- Powervault Me4 DGDokument107 SeitenPowervault Me4 DGbrayerly143Noch keine Bewertungen
- MEC 410 Chapter 7 Spring 2017Dokument67 SeitenMEC 410 Chapter 7 Spring 2017Frederick KooNoch keine Bewertungen
- Customer Service Department: Komatsu Utility Europe Pag. 1 Di 5 WETT001304Dokument5 SeitenCustomer Service Department: Komatsu Utility Europe Pag. 1 Di 5 WETT001304juanito100% (1)
- Concept BS CatalogueDokument16 SeitenConcept BS CataloguegbaludbNoch keine Bewertungen
- GSK ZJY Spindle Motor Manual Efamatic 1Dokument31 SeitenGSK ZJY Spindle Motor Manual Efamatic 1rayss1978Noch keine Bewertungen
- Using DS18B20 Temp Sensor On AVRDokument16 SeitenUsing DS18B20 Temp Sensor On AVRjoprinzNoch keine Bewertungen
- Computer Basic Answer KeysDokument16 SeitenComputer Basic Answer KeysjagadeeshpersonaluseNoch keine Bewertungen
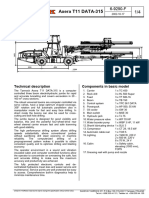
- T11 Specifications 107D11811-1Dokument4 SeitenT11 Specifications 107D11811-1Alexandra chata monsalve momsalveNoch keine Bewertungen
- Bluetooth Mini Earbud s530 ManualDokument3 SeitenBluetooth Mini Earbud s530 ManualDavidNoch keine Bewertungen
- Standard Deep Groove Ball Bearings by JESADokument3 SeitenStandard Deep Groove Ball Bearings by JESAAjanta BearingNoch keine Bewertungen
- Aleph J ManualDokument6 SeitenAleph J ManualasenmtNoch keine Bewertungen
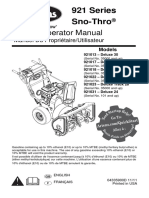
- Ariens Model 921013 Deluxe 30 Snow Blower Operator ManualDokument46 SeitenAriens Model 921013 Deluxe 30 Snow Blower Operator ManualTim MckennaNoch keine Bewertungen
- Datasheet PDFDokument8 SeitenDatasheet PDFSaad LehlouNoch keine Bewertungen
- Instruction Sheet 735 3101: Industrial Frequency Converter 400 V (735 3101)Dokument4 SeitenInstruction Sheet 735 3101: Industrial Frequency Converter 400 V (735 3101)John Philip Rosario SabayleNoch keine Bewertungen
- Helipath InstructionsDokument4 SeitenHelipath InstructionsRobert Soto100% (1)
- 1 Esp It Worksheet Book 1 Unit 4Dokument2 Seiten1 Esp It Worksheet Book 1 Unit 4bartosz kosiorNoch keine Bewertungen
- LabGruppen Lab - 1300cDokument12 SeitenLabGruppen Lab - 1300cdodifirmanNoch keine Bewertungen
- Juk LH-3128-7 3128Dokument48 SeitenJuk LH-3128-7 3128RHoska100% (1)