Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Causes of Subsynchronous Vibration in Integrally Geared CompressorsDokument12 SeitenCauses of Subsynchronous Vibration in Integrally Geared CompressorsLe Thanh Hai100% (1)
- (Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorDokument4 Seiten(Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorLe Thanh HaiNoch keine Bewertungen
- 2.vibration Case Study 2Dokument5 Seiten2.vibration Case Study 2Le Thanh HaiNoch keine Bewertungen
- PeakvueDokument68 SeitenPeakvueLe Thanh Hai100% (1)
- How To Improve English Speaking Skills?: 322 AnswersDokument4 SeitenHow To Improve English Speaking Skills?: 322 AnswersLe Thanh HaiNoch keine Bewertungen
- RP SpectrumsDokument2 SeitenRP SpectrumsLe Thanh HaiNoch keine Bewertungen
- Part Four - Answers and Glossary: I L Ve RuboardDokument18 SeitenPart Four - Answers and Glossary: I L Ve RuboardLe Thanh HaiNoch keine Bewertungen
- Three People JumpedDokument3 SeitenThree People JumpedLe Thanh HaiNoch keine Bewertungen
- Part Three - Using Prepositions: I L Ve RuboardDokument24 SeitenPart Three - Using Prepositions: I L Ve RuboardLe Thanh HaiNoch keine Bewertungen
- Flyer TR Nrs NP 110315Dokument2 SeitenFlyer TR Nrs NP 110315Le Thanh HaiNoch keine Bewertungen
- Intro To VA Terms & ConceptsDokument20 SeitenIntro To VA Terms & ConceptsLe Thanh HaiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerDokument23 SeitenSensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerDungNoch keine Bewertungen
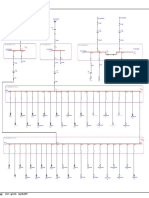
- One-Line Diagram - OLV1 (Short-Circuit Analysis)Dokument20 SeitenOne-Line Diagram - OLV1 (Short-Circuit Analysis)Yogesh MittalNoch keine Bewertungen
- Free Governor Mode of OperationDokument12 SeitenFree Governor Mode of Operationlrpatra100% (2)
- Lincoln Ranger 225Dokument6 SeitenLincoln Ranger 225fdpc1987Noch keine Bewertungen
- Westinghouse Lighting Rampliter III HID Airport Floodlight System Spec Sheet 8-72Dokument2 SeitenWestinghouse Lighting Rampliter III HID Airport Floodlight System Spec Sheet 8-72Alan MastersNoch keine Bewertungen
- 984 SystemmanualDokument328 Seiten984 SystemmanualMark TaylorNoch keine Bewertungen
- Research Solar PanelDokument13 SeitenResearch Solar PanelCherri Amistoso cheNoch keine Bewertungen
- Drive Emerson DatasheetDokument12 SeitenDrive Emerson DatasheetArmando JuarezNoch keine Bewertungen
- AD2006+ BASE Brochure PDFDokument1 SeiteAD2006+ BASE Brochure PDFRodolfo TorresNoch keine Bewertungen
- View Topic - New VT Plus Series FX Loop - ValvetronixDokument5 SeitenView Topic - New VT Plus Series FX Loop - ValvetronixStaticNoch keine Bewertungen
- ECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXDokument11 SeitenECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXXxx CccNoch keine Bewertungen
- Electrical Engineering Hand BookDokument22 SeitenElectrical Engineering Hand Bookjicksonjohn100% (1)
- GCC 28 enDokument6 SeitenGCC 28 enEduardo VicoNoch keine Bewertungen
- DIY EEG and ECG Circuit PDFDokument10 SeitenDIY EEG and ECG Circuit PDFfernandovaras2005Noch keine Bewertungen
- Computer Networks: Transmission Impairments and Network PerformanceDokument19 SeitenComputer Networks: Transmission Impairments and Network PerformancePrakhar PathakNoch keine Bewertungen
- Speech Enhancement: Chunjian Li Aalborg University, DenmarkDokument44 SeitenSpeech Enhancement: Chunjian Li Aalborg University, DenmarkSNEHA MARIYAM VARGHESE SIM 16-18Noch keine Bewertungen
- Back To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalDokument5 SeitenBack To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalJason FloydNoch keine Bewertungen
- 30KW Solar System (3587)Dokument2 Seiten30KW Solar System (3587)Mokh Latieful AkbarNoch keine Bewertungen
- Loadbreak ElbowsDokument8 SeitenLoadbreak ElbowsGustavo PérezNoch keine Bewertungen
- ELBI General CatalogDokument68 SeitenELBI General CatalogTapelea CristianNoch keine Bewertungen
- Advanced Power Electronics Corp.: DescriptionDokument5 SeitenAdvanced Power Electronics Corp.: DescriptionkalanghoNoch keine Bewertungen
- Analog DAN ModuelsDokument20 SeitenAnalog DAN Moduelskzb003Noch keine Bewertungen
- Power Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDokument9 SeitenPower Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDavid QuispeNoch keine Bewertungen
- LAB 1.cDokument13 SeitenLAB 1.cMUHAMMAD AMMARNoch keine Bewertungen
- 20-Parallel Adder - Subtractor, Carry Look Ahead Adder-14-02-2023 PDFDokument13 Seiten20-Parallel Adder - Subtractor, Carry Look Ahead Adder-14-02-2023 PDFBack upNoch keine Bewertungen
- TC58NVG0S3ETA00Dokument65 SeitenTC58NVG0S3ETA00Freddy AmayaNoch keine Bewertungen
- CatalogDokument7 SeitenCataloglangtu2011Noch keine Bewertungen
- Fujitsu mb1502Dokument15 SeitenFujitsu mb1502haha2012Noch keine Bewertungen
- With 105N4710 & 105N4760 ControllersDokument3 SeitenWith 105N4710 & 105N4760 ControllersHarold ReyesNoch keine Bewertungen
- SAILOR 6000 VHF Program User Manual PDFDokument470 SeitenSAILOR 6000 VHF Program User Manual PDFnzmrsNoch keine Bewertungen