Das könnte Ihnen auch gefallen
- Quimica Analítica - Repaso Examen FinalDokument13 SeitenQuimica Analítica - Repaso Examen FinalEDGELIZ N RAMOS-ROSARIONoch keine Bewertungen
- Quimica Analítica - Repaso Examen FinalDokument13 SeitenQuimica Analítica - Repaso Examen FinalEDGELIZ N RAMOS-ROSARIONoch keine Bewertungen
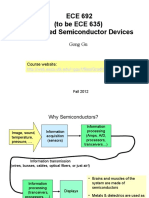
- ECE 692 (To Be ECE 635) Advanced Semiconductor Devices: Gong GuDokument14 SeitenECE 692 (To Be ECE 635) Advanced Semiconductor Devices: Gong GuMohankumar NNoch keine Bewertungen
- Fem 1Dokument95 SeitenFem 1think groupyNoch keine Bewertungen
- Fea Lab Manual 18mel68 July 2021Dokument49 SeitenFea Lab Manual 18mel68 July 2021md bashirul haqueNoch keine Bewertungen
- Lecture1 5Dokument41 SeitenLecture1 5JagritiKumariNoch keine Bewertungen
- ISYE 8803 - Kamran - M1 - Intro To HD and Functional Data - UpdatedDokument87 SeitenISYE 8803 - Kamran - M1 - Intro To HD and Functional Data - UpdatedVida GholamiNoch keine Bewertungen
- Chapter 1 NewDokument28 SeitenChapter 1 NewGemechu B. JiruNoch keine Bewertungen
- Split Hopkinson Pressure Bar Graphical Analysis ToolDokument5 SeitenSplit Hopkinson Pressure Bar Graphical Analysis Toolotipicni6969Noch keine Bewertungen
- 1.2a Uncertainties and ErrorsDokument31 Seiten1.2a Uncertainties and ErrorsJiwoo SeoNoch keine Bewertungen
- 1050 Laboratory: Experiment 1: Simple PendulumDokument27 Seiten1050 Laboratory: Experiment 1: Simple PendulumAhmed Ishmam AzmiNoch keine Bewertungen
- DSP Lab - 15ecl57 Part - IDokument37 SeitenDSP Lab - 15ecl57 Part - Ivsuresha25% (4)
- Practical Radio Frequency Test and Measurement: A Technician's HandbookVon EverandPractical Radio Frequency Test and Measurement: A Technician's HandbookBewertung: 5 von 5 Sternen5/5 (2)
- Waveform MeasurementsDokument17 SeitenWaveform MeasurementsrobertNoch keine Bewertungen
- Modelling and Analysis Lab (FEA) 17MEL68: Department of Mechanical EngineeringDokument52 SeitenModelling and Analysis Lab (FEA) 17MEL68: Department of Mechanical EngineeringSarath KumarNoch keine Bewertungen
- PHYS 291 Chapter 1: 1. What Is Physics? 2. What Do We Want From This Class? 3. Brief History of Physics 4. Chapter OneDokument18 SeitenPHYS 291 Chapter 1: 1. What Is Physics? 2. What Do We Want From This Class? 3. Brief History of Physics 4. Chapter OneRyan LanceNoch keine Bewertungen
- PHYS 291 Chapter 1: 1. What Is Physics? 2. What Do We Want From This Class? 3. Brief History of Physics 4. Chapter OneDokument18 SeitenPHYS 291 Chapter 1: 1. What Is Physics? 2. What Do We Want From This Class? 3. Brief History of Physics 4. Chapter OneRyan LanceNoch keine Bewertungen
- Chapter 1Dokument54 SeitenChapter 1SURAFEL BIYAZENNoch keine Bewertungen
- Xray Residual StressDokument51 SeitenXray Residual StressBenjamin SmithNoch keine Bewertungen
- ME124 Mechanical Engineering Laboratory III Experiment #2: Linear and Nonlinear Flexural Vibrations of A BeamDokument4 SeitenME124 Mechanical Engineering Laboratory III Experiment #2: Linear and Nonlinear Flexural Vibrations of A Beamtolomeo10Noch keine Bewertungen
- ExperimentsDokument22 SeitenExperimentsBakkashreya SriNoch keine Bewertungen
- 2007 K12 Phys Wieman APSDokument36 Seiten2007 K12 Phys Wieman APSJoshuaNoch keine Bewertungen
- Guiadocent 250704 Curs 2023 enDokument6 SeitenGuiadocent 250704 Curs 2023 enahmed11 engyemenNoch keine Bewertungen
- RNN LSTMDokument72 SeitenRNN LSTM5049 Harishchandra KumarNoch keine Bewertungen
- 2-Basic Statistical MethodsDokument67 Seiten2-Basic Statistical MethodsHassan AyashNoch keine Bewertungen
- RF & Microwave Circuits For Wireless Communications: - Welcome! - Agenda TodayDokument41 SeitenRF & Microwave Circuits For Wireless Communications: - Welcome! - Agenda TodaythanuNoch keine Bewertungen
- 01 Lecture OutlineDokument31 Seiten01 Lecture Outlinemozajamil777Noch keine Bewertungen
- 2 John - Makous OSRTDokument27 Seiten2 John - Makous OSRTMartin BaqueiroNoch keine Bewertungen
- Lab Session (1) : Supervisor: Dr. Hany Hammad Tas: Yasmine AbdallaDokument30 SeitenLab Session (1) : Supervisor: Dr. Hany Hammad Tas: Yasmine AbdallaKunal KhandelwalNoch keine Bewertungen
- Course 1: Generalities About Signals and SystemsDokument17 SeitenCourse 1: Generalities About Signals and SystemsnourcheraNoch keine Bewertungen
- Assignment ScopeDokument2 SeitenAssignment ScopesunilsheelavantNoch keine Bewertungen
- Laboratory Report Writing Guideline: FkekkDokument12 SeitenLaboratory Report Writing Guideline: FkekklangNoch keine Bewertungen
- Shigley's SLecture Notes - Chapter 1-20-2Dokument68 SeitenShigley's SLecture Notes - Chapter 1-20-2huyev2000Noch keine Bewertungen
- Ele2213 Set 1Dokument40 SeitenEle2213 Set 1MUSOKE SIMON DEONoch keine Bewertungen
- Chapter 1 - Physics and MeasurementDokument18 SeitenChapter 1 - Physics and MeasurementJasmin TajudinNoch keine Bewertungen
- Scribd Upload A Document Search Documents Explore Sign Up Log inDokument23 SeitenScribd Upload A Document Search Documents Explore Sign Up Log inNayan ThakurNoch keine Bewertungen
- Tensile ReportDokument2 SeitenTensile ReportMotasem MrwanNoch keine Bewertungen
- Department of Computer EngineeringDokument9 SeitenDepartment of Computer EngineeringNehaNoch keine Bewertungen
- ME 408 Lecture2Dokument47 SeitenME 408 Lecture2reader1900Noch keine Bewertungen
- 2009 03 04 Exploratory Data AnalysisDokument24 Seiten2009 03 04 Exploratory Data AnalysismariammariNoch keine Bewertungen
- Introduction To Signal Integrity: MahajanDokument14 SeitenIntroduction To Signal Integrity: MahajanAbhijit MahajanNoch keine Bewertungen
- PHM - Control - Bandwidth 2015 6 4 Zhang - 2Dokument8 SeitenPHM - Control - Bandwidth 2015 6 4 Zhang - 2Phạm Thành TrungNoch keine Bewertungen
- Signals and Systems: Class: EE20-B Instructor: Aima ZahidDokument24 SeitenSignals and Systems: Class: EE20-B Instructor: Aima Zahidfarhan badshahNoch keine Bewertungen
- Experiment Name: Introduction To Circuits. Students:: Osama Othman Rodaina Basem Asem DiabDokument8 SeitenExperiment Name: Introduction To Circuits. Students:: Osama Othman Rodaina Basem Asem DiabًNoch keine Bewertungen
- STS5 Bending Stress in A Beam DatasheetDokument3 SeitenSTS5 Bending Stress in A Beam DatasheetLeandro Silva SantosNoch keine Bewertungen
- (Sample) Lab Report Template - Body Page (Programming Lab)Dokument5 Seiten(Sample) Lab Report Template - Body Page (Programming Lab)ShourovNoch keine Bewertungen
- EE370 LabManualDokument50 SeitenEE370 LabManualAnoop Mohan ChemnikarNoch keine Bewertungen
- ELTR120 Sec11 PDFDokument136 SeitenELTR120 Sec11 PDFifeniyi100% (1)
- Introduction To Computational HydraulicsDokument33 SeitenIntroduction To Computational HydraulicsDatz SorianoNoch keine Bewertungen
- Week 4 Lecture - Sensors and Principles - Slides OnlyDokument69 SeitenWeek 4 Lecture - Sensors and Principles - Slides OnlyHSC CoachNoch keine Bewertungen
- Chapter 1 NewDokument29 SeitenChapter 1 NewMikias YimerNoch keine Bewertungen
- Lecture 1-260Dokument10 SeitenLecture 1-260Mohammed IrfanNoch keine Bewertungen
- PHYsics 3.7Dokument4 SeitenPHYsics 3.7Dikshansh KaushalNoch keine Bewertungen
- Chapter No. 04 Randomized Blocks, Latin Square, and Related Designs - 02 (Presentation)Dokument38 SeitenChapter No. 04 Randomized Blocks, Latin Square, and Related Designs - 02 (Presentation)Sahib Ullah MukhlisNoch keine Bewertungen
- Engineering 27 Metrology ConceptsDokument15 SeitenEngineering 27 Metrology ConceptsJack WallisNoch keine Bewertungen
- DM Notes 0 IntroDokument13 SeitenDM Notes 0 IntroAndi Muhammad Nur PutraNoch keine Bewertungen
- Radiation Tolerant CMOS Delta Sigma Time To DigitalDokument160 SeitenRadiation Tolerant CMOS Delta Sigma Time To DigitalJabertechNoch keine Bewertungen
- Transportation Planning Arround Conservation Forest Area at Supiori As A New Expanding Regency at Biak IslandDokument8 SeitenTransportation Planning Arround Conservation Forest Area at Supiori As A New Expanding Regency at Biak IslandDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Report of Recruitment 2012Dokument3 SeitenReport of Recruitment 2012Dr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Reivision - Kalimantan River Transportation SustainabilityDokument10 SeitenReivision - Kalimantan River Transportation SustainabilityDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Highway MeteorologyDokument216 SeitenHighway MeteorologyaldokrenaNoch keine Bewertungen
- Relatório SternDokument613 SeitenRelatório SternANDI Agencia de Noticias do Direito da Infancia100% (2)
- Investigasi Dan Aplikasi Dalam Analisis Power Flow Pada Sistem Dinamik Non Linier - Marine Transport - Yang - JianDokument1 SeiteInvestigasi Dan Aplikasi Dalam Analisis Power Flow Pada Sistem Dinamik Non Linier - Marine Transport - Yang - JianDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Interaksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDokument1 SeiteInteraksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Beban Impak Hydro Pada Struktur Kapal - Marine Transport - Lee - JuneDokument1 SeiteBeban Impak Hydro Pada Struktur Kapal - Marine Transport - Lee - JuneDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Disain Kapal Layar Balap Yach - Marine Transport - Scarponi - MatteoDokument1 SeiteDisain Kapal Layar Balap Yach - Marine Transport - Scarponi - MatteoDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Interaksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDokument1 SeiteInteraksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Presentation File 11 TH Qir University of Indonesia 2009 Transport Planning Arround Conservation Forest Area at SupioriDokument31 SeitenPresentation File 11 TH Qir University of Indonesia 2009 Transport Planning Arround Conservation Forest Area at SupioriDr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Pavement Design Manual Jan 09Dokument72 SeitenPavement Design Manual Jan 09Dr. Ir. R. Didin Kusdian, MT.100% (2)
- Composite Pavement Virginia Tech 09 Cr2Dokument60 SeitenComposite Pavement Virginia Tech 09 Cr2Dr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Specialty Lubricants Molykote®: 44MA GreaseDokument2 SeitenSpecialty Lubricants Molykote®: 44MA GreasefadhlidzilNoch keine Bewertungen
- Rosemount 2120 Vibrating Fork Liquid Level SwitchDokument16 SeitenRosemount 2120 Vibrating Fork Liquid Level SwitchTariqMalikNoch keine Bewertungen
- 02 MDB3083 - Lecture1 (B) PDFDokument30 Seiten02 MDB3083 - Lecture1 (B) PDFJasmine_lai00Noch keine Bewertungen
- DWDM Optical Power DebuggingDokument17 SeitenDWDM Optical Power DebuggingJuancarlos ArrietaNoch keine Bewertungen
- A Database of Aerothermal Measurements in Hypersonic Flow in "BuildingDokument60 SeitenA Database of Aerothermal Measurements in Hypersonic Flow in "BuildingNeoNoch keine Bewertungen
- Factors Affecting Grade 12 Students To Use Internet During Class HourDokument39 SeitenFactors Affecting Grade 12 Students To Use Internet During Class HourJerric Brandon FalconiNoch keine Bewertungen
- Overhall Diferencial Mack PDFDokument150 SeitenOverhall Diferencial Mack PDFmanuel fernandezNoch keine Bewertungen
- Datasheet - HK f7313 39760Dokument7 SeitenDatasheet - HK f7313 39760niko67Noch keine Bewertungen
- Neurophone Ebook EnglDokument19 SeitenNeurophone Ebook EnglViolin_teacher100% (3)
- Learn PowerShell Core 6.0Dokument800 SeitenLearn PowerShell Core 6.0Felippe Coelho100% (2)
- Ahmed Zaiba's CV SalehDokument6 SeitenAhmed Zaiba's CV SalehSarah ZaibaNoch keine Bewertungen
- Priced Boq - Beach RestaurantDokument64 SeitenPriced Boq - Beach Restaurantpsn_kylmNoch keine Bewertungen
- Binary and Decimal Number Systems: Addressing The Network - Ipv4Dokument3 SeitenBinary and Decimal Number Systems: Addressing The Network - Ipv4Mase Astrid C. BarayugaNoch keine Bewertungen
- NHPC ReportDokument53 SeitenNHPC ReportVishal SinghNoch keine Bewertungen
- Ansi C37.72-1987 PDFDokument25 SeitenAnsi C37.72-1987 PDFIvanNoch keine Bewertungen
- Fire Alarm Sys Nec 760Dokument10 SeitenFire Alarm Sys Nec 760nadeem Uddin100% (1)
- Msamb Rules and Japan GuidelinesDokument3 SeitenMsamb Rules and Japan GuidelineslawrgeoNoch keine Bewertungen
- Technical Data: An Innovative & Cutting-Edge Digital Radiography SystemDokument12 SeitenTechnical Data: An Innovative & Cutting-Edge Digital Radiography SystemJacques GamelinNoch keine Bewertungen
- BH MobileDokument6 SeitenBH MobileleostojcicNoch keine Bewertungen
- EHB02 Technical Specifications: 1. External DimensionsDokument5 SeitenEHB02 Technical Specifications: 1. External DimensionsArmandoCalderonNoch keine Bewertungen
- Soichiro HondaDokument5 SeitenSoichiro HondaVeronika YsNoch keine Bewertungen
- GS-1930 GS-1530 Service Manual: Technical PublicationsDokument137 SeitenGS-1930 GS-1530 Service Manual: Technical PublicationshabibullaNoch keine Bewertungen
- Data Sheet: TDA1510AQDokument12 SeitenData Sheet: TDA1510AQGerardo PonceNoch keine Bewertungen
- Pumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemDokument2 SeitenPumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemTeknik MakinaNoch keine Bewertungen
- Volvo Ec35D: Parts CatalogDokument461 SeitenVolvo Ec35D: Parts Cataloggiselle100% (1)
- The Giza Power PlantDokument10 SeitenThe Giza Power Plantinterstar100% (1)
- 01 IK IESYS e Communications OverviewDokument12 Seiten01 IK IESYS e Communications OverviewHernando AlborNoch keine Bewertungen
- History Desktop PublishingDokument16 SeitenHistory Desktop PublishingsanchezromanNoch keine Bewertungen
- CH 01Dokument28 SeitenCH 01Deepu MaroliNoch keine Bewertungen