Das könnte Ihnen auch gefallen
- DL Nº 276 - Ley de Bases de La Carrera (Reglamento DefinitivoDokument16 SeitenDL Nº 276 - Ley de Bases de La Carrera (Reglamento Definitivougelpaca100% (1)
- Mapas Mental Del Estado .Dokument1 SeiteMapas Mental Del Estado .Mateo QuispeNoch keine Bewertungen
- Ley 28411Dokument56 SeitenLey 28411Rossmery Albarran TaypeNoch keine Bewertungen
- Cisco Ip Phone 7941g Espaol Guia UsuarioDokument100 SeitenCisco Ip Phone 7941g Espaol Guia UsuarioTheodore WilsonNoch keine Bewertungen
- Instructivo Estimacion v2.4pDokument37 SeitenInstructivo Estimacion v2.4pluisNoch keine Bewertungen
- Siemon Fiber Connect Panel Fcp3 Spec Sheet LaDokument4 SeitenSiemon Fiber Connect Panel Fcp3 Spec Sheet LaEdder BrionesNoch keine Bewertungen
- Nuevo Reglamento Ressetae Legislacion-R M N 111-2013 MEM-DM-Nz7z1zz76zzzDokument59 SeitenNuevo Reglamento Ressetae Legislacion-R M N 111-2013 MEM-DM-Nz7z1zz76zzzAlex Ortiz DiazNoch keine Bewertungen
- 6817 23169 1 SMDokument10 Seiten6817 23169 1 SMMateo QuispeNoch keine Bewertungen
- Cap 17 PDFDokument43 SeitenCap 17 PDFIsabelCondoriMNoch keine Bewertungen
- Lineamientos para La Elaboración Del Plan Multianual de Mantenimiento de La Infraestructura y El PDFDokument83 SeitenLineamientos para La Elaboración Del Plan Multianual de Mantenimiento de La Infraestructura y El PDFpfespinoza0% (2)
- INCENDIODokument4 SeitenINCENDIOMateo QuispeNoch keine Bewertungen
- e-QHALIDokument31 Seitene-QHALIRonyJorgeTacasMisaycoNoch keine Bewertungen
- Ley Que Modifica Artículo 11 de La Ley General de SaludDokument3 SeitenLey Que Modifica Artículo 11 de La Ley General de SaludVary H. Silva SerrotNoch keine Bewertungen
- R.M - 214-2018-MINSA2 Norma Tecnica Gestion Historia ClinicaDokument123 SeitenR.M - 214-2018-MINSA2 Norma Tecnica Gestion Historia ClinicaFMP100% (5)
- D S 082-2019-EfDokument21 SeitenD S 082-2019-EfLa Ley100% (7)
- Ley de Contrataciones y To Del OSCEDokument222 SeitenLey de Contrataciones y To Del OSCEDCELESTE50% (2)
- Boletin Tecnologico 001 2018Dokument24 SeitenBoletin Tecnologico 001 2018M-ilson QHNoch keine Bewertungen
- Eett Libro Sesion1Dokument16 SeitenEett Libro Sesion1Renzo TevesNoch keine Bewertungen
- MAN 3 Sistema Global de Gestion Tecnica y MantenimientoDokument21 SeitenMAN 3 Sistema Global de Gestion Tecnica y MantenimientoMateo QuispeNoch keine Bewertungen
- IOARRDokument37 SeitenIOARRPaola Cecilia Gamboa RospigliosiNoch keine Bewertungen
- Resi Duos Solid OsDokument12 SeitenResi Duos Solid OsMateo QuispeNoch keine Bewertungen
- R M 367-2015-Minsa Parte Iii PDFDokument28 SeitenR M 367-2015-Minsa Parte Iii PDFMateo QuispeNoch keine Bewertungen
- GalenP Guia ImplantacionDokument33 SeitenGalenP Guia ImplantacionEdward HarrisNoch keine Bewertungen
- CalderasDokument149 SeitenCalderasJuan Daniel GuaquetaNoch keine Bewertungen
- 201 Idsn: de Salud NoDokument10 Seiten201 Idsn: de Salud NoMateo QuispeNoch keine Bewertungen
- Dise o Plantas I Presentaci N 3 PDFDokument29 SeitenDise o Plantas I Presentaci N 3 PDFCarlitos HernandezNoch keine Bewertungen
- Sensores y ActuadoresDokument100 SeitenSensores y ActuadoresPatricio VillalónNoch keine Bewertungen
- Manual Ilustrado para La Instalacion Domotica PDFDokument99 SeitenManual Ilustrado para La Instalacion Domotica PDFMateo Quispe0% (1)
- Diseño de Filtros Digitales Con Arduino Por XE2N Jesus LopezDokument27 SeitenDiseño de Filtros Digitales Con Arduino Por XE2N Jesus LopezMateo QuispeNoch keine Bewertungen
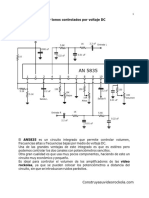
- AN5835Dokument4 SeitenAN5835Porfirio J GutierrezNoch keine Bewertungen
- Salud Fisica y MentalDokument7 SeitenSalud Fisica y MentalSamuel Beb chubNoch keine Bewertungen
- Temas para Charlas de SeguridadDokument203 SeitenTemas para Charlas de Seguridadserrano_jdsvNoch keine Bewertungen
- Guia Gestion Energetica Puertos FirmadaDokument296 SeitenGuia Gestion Energetica Puertos FirmadaFran Pereira PedreiraNoch keine Bewertungen
- RubeolaDokument10 SeitenRubeolaEstefania MuñozNoch keine Bewertungen
- Lengua CastellanaDokument5 SeitenLengua CastellanaGloria GuerreroNoch keine Bewertungen
- Termodinamica 5ta Edicion Yunus A Cengel Michael A Boles 267 283 PDFDokument17 SeitenTermodinamica 5ta Edicion Yunus A Cengel Michael A Boles 267 283 PDFostz albanNoch keine Bewertungen
- Reporte AntaminaDokument7 SeitenReporte AntaminaDjBryanPonceCentenoNoch keine Bewertungen
- Eladoracion de Cerveza Artesanal A Partir de Subproductos Del Cereal. CAMA23Dokument10 SeitenEladoracion de Cerveza Artesanal A Partir de Subproductos Del Cereal. CAMA23mauricio jimenezNoch keine Bewertungen
- Abandono en Francisco de SalesDokument19 SeitenAbandono en Francisco de SalesQuerubin VelozaNoch keine Bewertungen
- Unidad 1 - Lecturas - Introducción Al Manejo Integrado Del Medio AmbienteDokument7 SeitenUnidad 1 - Lecturas - Introducción Al Manejo Integrado Del Medio AmbienteCruz MarceloNoch keine Bewertungen
- Folleto Divulgativo BasacoteDokument6 SeitenFolleto Divulgativo BasacoteWilmer Alexander Escobar DivasNoch keine Bewertungen
- Sistema Binario - Sistema de ConteoDokument14 SeitenSistema Binario - Sistema de ConteoInversiones RENoch keine Bewertungen
- Documento Cuarto Vertebrados PDFDokument1 SeiteDocumento Cuarto Vertebrados PDFKarime RodriguezNoch keine Bewertungen
- SCRDokument2 SeitenSCRAlexis JohnsonNoch keine Bewertungen
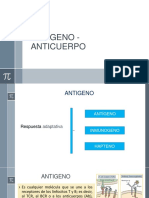
- Clase 4 Antígeno-Anticuerpo SEMANA 4Dokument67 SeitenClase 4 Antígeno-Anticuerpo SEMANA 4OCTAVIO100% (2)
- Descolonización - UNAMDokument175 SeitenDescolonización - UNAMAna Villalba100% (1)
- Manual de Doctrina Social de La IglesiaDokument47 SeitenManual de Doctrina Social de La IglesiaJulian Bedoya CardonaNoch keine Bewertungen
- Internet de Las Cosas (IoT)Dokument8 SeitenInternet de Las Cosas (IoT)Ivan Molina CáceresNoch keine Bewertungen
- Cuadro ProféticoDokument2 SeitenCuadro ProféticoCesar GonzalezNoch keine Bewertungen
- Heridas AbiertasDokument6 SeitenHeridas AbiertasDulce Fabiola BarriosNoch keine Bewertungen
- Camion de CargaDokument7 SeitenCamion de CargamiguelNoch keine Bewertungen
- 04 CetosisDokument0 Seiten04 CetosisCatalina Pérez ValderramaNoch keine Bewertungen
- Quiz 50Dokument10 SeitenQuiz 50RUBEN FUENTESNoch keine Bewertungen
- Solucion Del EjercicioDokument21 SeitenSolucion Del EjercicioFrancisco Gallegos RanillaNoch keine Bewertungen
- La Ensenanza Del Proceso de Diseno PDFDokument16 SeitenLa Ensenanza Del Proceso de Diseno PDFLissy PortelaNoch keine Bewertungen
- Clase 3 - Asepsia e HigieneDokument22 SeitenClase 3 - Asepsia e HigieneAlejandra VillavicencioNoch keine Bewertungen
- Ebullicion Del AguaDokument2 SeitenEbullicion Del AguaAntonio GomezNoch keine Bewertungen
- Comentario Grupo 14Dokument4 SeitenComentario Grupo 14KARINA LIZETH TORRES ENCISONoch keine Bewertungen
- Resumen Teoría de La Relatividad EspecialDokument2 SeitenResumen Teoría de La Relatividad EspecialÁlvaro Villarino BonetNoch keine Bewertungen
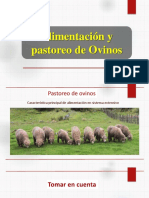
- Clase 10 OvinosDokument19 SeitenClase 10 OvinosPAUL FRANKLIN QUISPE JURADONoch keine Bewertungen