Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- NBD Eq6Dokument80 SeitenNBD Eq6Sujan SinghNoch keine Bewertungen
- FNDDokument3 SeitenFNDSujan SinghNoch keine Bewertungen
- List Of: S.No. ParticularsDokument21 SeitenList Of: S.No. ParticularsSujan SinghNoch keine Bewertungen
- BeamDokument1 SeiteBeamSujan SinghNoch keine Bewertungen
- FNDDokument3 SeitenFNDSujan SinghNoch keine Bewertungen
- JOSHI Bar ScheduleDokument40 SeitenJOSHI Bar ScheduleSujan SinghNoch keine Bewertungen
- Design of Two Way Slab: StatusDokument2 SeitenDesign of Two Way Slab: StatusSujan SinghNoch keine Bewertungen
- Staircasedesigncalculation: I I Material Properties DimensionsDokument3 SeitenStaircasedesigncalculation: I I Material Properties DimensionsSujan SinghNoch keine Bewertungen
- Disaster Resilience and Safety:: A) Site ConsiderationDokument9 SeitenDisaster Resilience and Safety:: A) Site ConsiderationSujan SinghNoch keine Bewertungen
- List Of: S.No. ParticularsDokument21 SeitenList Of: S.No. ParticularsSujan SinghNoch keine Bewertungen
- Structure Dhan BDR LasiwaDokument37 SeitenStructure Dhan BDR LasiwaSujan Singh100% (1)
- Slab PDFDokument2 SeitenSlab PDFSujan SinghNoch keine Bewertungen
- Geometry of Staircase: (Limit State Method As Per IS 456-2000) Design of Stair-CaseDokument2 SeitenGeometry of Staircase: (Limit State Method As Per IS 456-2000) Design of Stair-CaseSujan SinghNoch keine Bewertungen
- Staircasedesigncalculation: I I Material Properties DimensionsDokument3 SeitenStaircasedesigncalculation: I I Material Properties DimensionsSujan SinghNoch keine Bewertungen
- Load CalculationDokument42 SeitenLoad CalculationSujan Singh0% (1)
- Structural Design OF: The Proposed Residential BuildingDokument2 SeitenStructural Design OF: The Proposed Residential BuildingSujan SinghNoch keine Bewertungen
- Depth of FoundationDokument9 SeitenDepth of FoundationSujan SinghNoch keine Bewertungen
- Combined Footing SalinDokument30 SeitenCombined Footing SalinSujan SinghNoch keine Bewertungen
- Rev StaircaseDokument3 SeitenRev StaircaseNguyen KhoiNoch keine Bewertungen
- Required Data:: Foundation DesignDokument3 SeitenRequired Data:: Foundation DesignSujan SinghNoch keine Bewertungen
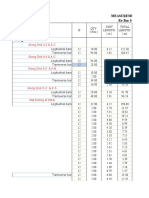
- Beam Details: no. φ no. φ no. φ no. φ Top Bottom end ties mid ties Top bottom area totalDokument1 SeiteBeam Details: no. φ no. φ no. φ no. φ Top Bottom end ties mid ties Top bottom area totalSujan SinghNoch keine Bewertungen
- Slab Design Detail: Partition LoadDokument2 SeitenSlab Design Detail: Partition LoadSujan SinghNoch keine Bewertungen
- Design of Combined FootingDokument26 SeitenDesign of Combined FootingSujan SinghNoch keine Bewertungen
- Basement Wall Design: Check For DepthDokument1 SeiteBasement Wall Design: Check For DepthSujan SinghNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Growth, Clusters, and Convergence in Ecuador: 1993-2011: December 2013Dokument18 SeitenGrowth, Clusters, and Convergence in Ecuador: 1993-2011: December 2013Dayanna ContentoNoch keine Bewertungen
- IDRISI Selva GIS Image Processing SpecificationsDokument12 SeitenIDRISI Selva GIS Image Processing SpecificationsjgstormNoch keine Bewertungen
- GIS Past Paper ExamsDokument11 SeitenGIS Past Paper ExamsShoturu100% (4)
- Aditya Kusuma, Bethanna Jackson Dan Ilan Noy1 (2018), A Viable and Cost Effective Weather Index Insurance ForDokument33 SeitenAditya Kusuma, Bethanna Jackson Dan Ilan Noy1 (2018), A Viable and Cost Effective Weather Index Insurance ForAdhan AkbarNoch keine Bewertungen
- Geospatial AnalysisDokument11 SeitenGeospatial AnalysischetanNoch keine Bewertungen
- Chapter2 GIS FundamentalsDokument34 SeitenChapter2 GIS FundamentalsMilena StevanovicNoch keine Bewertungen
- The Nature of Geographic KnowledgeDokument15 SeitenThe Nature of Geographic KnowledgeLady Johanna Alfonso MorenoNoch keine Bewertungen
- Landscape and Urban Planning: Luis InostrozaDokument13 SeitenLandscape and Urban Planning: Luis InostrozaLina Maria Niño OlmosNoch keine Bewertungen
- Understanding Housing Prices Using Geographic Big Data: A Case Study in ShenzhenDokument20 SeitenUnderstanding Housing Prices Using Geographic Big Data: A Case Study in ShenzhenYohanes Eki ApriliawanNoch keine Bewertungen
- Computers, Environment and Urban Systems: Cong Cong, Yoonshin Kwak, Brian DealDokument13 SeitenComputers, Environment and Urban Systems: Cong Cong, Yoonshin Kwak, Brian DealVince RomanoNoch keine Bewertungen
- Soil and Water Conservation Engineering1 PDFDokument118 SeitenSoil and Water Conservation Engineering1 PDFIsmail Naufal AzkiaNoch keine Bewertungen
- Principles of GIS Study Guide PDFDokument16 SeitenPrinciples of GIS Study Guide PDFPaty Osuna FuentesNoch keine Bewertungen
- Application of Gis in Eia StudiesDokument20 SeitenApplication of Gis in Eia StudiesVikaas SagerNoch keine Bewertungen
- Ggmap PDFDokument12 SeitenGgmap PDFMárion Saavedra SandovalNoch keine Bewertungen
- Methods Ecol Evol - 2023 - Bishop - Generating Continuous Maps of Genetic Diversity Using Moving WindowsDokument7 SeitenMethods Ecol Evol - 2023 - Bishop - Generating Continuous Maps of Genetic Diversity Using Moving WindowsHtein Lynn AungNoch keine Bewertungen
- Geographic Information Systems As An Integrating TechnologyDokument12 SeitenGeographic Information Systems As An Integrating TechnologyZIVAISHE ZHOUNoch keine Bewertungen
- GIS Lecture NotesDokument39 SeitenGIS Lecture NotesRonald DdibyaNoch keine Bewertungen
- Photogrammetric MappingDokument371 SeitenPhotogrammetric MappingSetang Besar0% (1)
- Spatial OperationsDokument14 SeitenSpatial Operationsrishav baishyaNoch keine Bewertungen
- Architectural Research and Design PortfolioDokument23 SeitenArchitectural Research and Design PortfolioMikhael JohanesNoch keine Bewertungen
- Integration of Geological Knowledge For Variogram ModelingDokument8 SeitenIntegration of Geological Knowledge For Variogram ModelingArdhanFarisan100% (1)
- Remote Sensing PDFDokument152 SeitenRemote Sensing PDFSaif JarralNoch keine Bewertungen
- Spatial Data Analysis of Fusarium. David BrownDokument72 SeitenSpatial Data Analysis of Fusarium. David BrownVíctor HugoNoch keine Bewertungen
- Spatial Data Analysis: Chapter 13 GeovisualizationDokument5 SeitenSpatial Data Analysis: Chapter 13 GeovisualizationAshwini PavankumarNoch keine Bewertungen
- Karachi GEE LULCDokument9 SeitenKarachi GEE LULCUrooj FatimaNoch keine Bewertungen
- EastWestAirlines ClusterDokument6 SeitenEastWestAirlines ClusterNiranjana MenonNoch keine Bewertungen
- GIS GlossaryDokument18 SeitenGIS Glossaryshivachandran sivanesanNoch keine Bewertungen
- Introduction To GISDokument56 SeitenIntroduction To GISSudharsananPRSNoch keine Bewertungen
- Sco417 - Gis ExamDokument2 SeitenSco417 - Gis ExamEICQ/00154/2020 SAMUEL MWANGI RUKWARONoch keine Bewertungen
- 2014 GeographyDokument2 Seiten2014 Geographyapi-241826287Noch keine Bewertungen