Das könnte Ihnen auch gefallen
- Texture Recognition With Random Subspace Neural ClassifierDokument6 SeitenTexture Recognition With Random Subspace Neural ClassifierDiego MVNoch keine Bewertungen
- Peter C. Maloney, E. R. Kashket, T. H. Wilson (Auth.), Edward D. Korn (Eds.) - Transport-Springer US (1975)Dokument211 SeitenPeter C. Maloney, E. R. Kashket, T. H. Wilson (Auth.), Edward D. Korn (Eds.) - Transport-Springer US (1975)Diego MVNoch keine Bewertungen
- Face PCNC PDFDokument9 SeitenFace PCNC PDFDiego MVNoch keine Bewertungen
- Artificial Neural Networks in Real-Life ApplicationsDokument395 SeitenArtificial Neural Networks in Real-Life ApplicationsTrịnh Hữu TâmNoch keine Bewertungen
- Army - fm20 3 - Camouflage Concealment and DecoysDokument98 SeitenArmy - fm20 3 - Camouflage Concealment and DecoysMeowmix100% (1)
- C++ Neural Networks and Fuzzy Logic - Valluru B. RaoDokument595 SeitenC++ Neural Networks and Fuzzy Logic - Valluru B. RaoThyago VasconcelosNoch keine Bewertungen
- Design of Attitude Control Systems For CubeSat-Class NanosatelliteDokument16 SeitenDesign of Attitude Control Systems For CubeSat-Class NanosatelliteDiego MVNoch keine Bewertungen
- Ninja - The Ninja Training Manual - Learn Ninjitsu!Dokument10 SeitenNinja - The Ninja Training Manual - Learn Ninjitsu!Jylava Claudiu0% (1)
- Brief Introduction To Neural NetworksDokument244 SeitenBrief Introduction To Neural NetworksCimarrones EmprendedoresNoch keine Bewertungen
- Baugh Wooley Multiplier VHDL CodeDokument3 SeitenBaugh Wooley Multiplier VHDL CodeDiego MVNoch keine Bewertungen
- Robot Open ProblemsDokument83 SeitenRobot Open ProblemsDiego MVNoch keine Bewertungen
- Pennies From Heaven: A Review of The New York Coin SeminarDokument8 SeitenPennies From Heaven: A Review of The New York Coin SeminarDiego MVNoch keine Bewertungen
- Quick Start Toc BuilderDokument100 SeitenQuick Start Toc BuilderplcmanaNoch keine Bewertungen
- How To Grind Lathe ToolsDokument16 SeitenHow To Grind Lathe Toolscharlie20377240100% (11)
- Manual ProteusDokument477 SeitenManual ProteusJose Negley Torres OcarizNoch keine Bewertungen
- Aerothermodynamic and Stability Analyses of A Deployable Re-Entry CapsuleDokument13 SeitenAerothermodynamic and Stability Analyses of A Deployable Re-Entry CapsuleDiego MVNoch keine Bewertungen
- 2013 ADC Report Final PDFDokument78 Seiten2013 ADC Report Final PDFDiego MVNoch keine Bewertungen
- D Real ThingDokument1 SeiteD Real Thing02062012Noch keine Bewertungen
- Assembly Instructions: Seven A4-Sized Sheets. Paper Craft: Three A4-Sized Sheets With 15 Parts in AllDokument7 SeitenAssembly Instructions: Seven A4-Sized Sheets. Paper Craft: Three A4-Sized Sheets With 15 Parts in AllRiadh FantarNoch keine Bewertungen
- 51-2006 ParkourCompendiumDokument10 Seiten51-2006 ParkourCompendiumJuliYankovayaNoch keine Bewertungen
- Ejercicio MecanismosDokument1 SeiteEjercicio MecanismosDiego MVNoch keine Bewertungen
- AO1 KiboCUBE UNOOSADokument8 SeitenAO1 KiboCUBE UNOOSADiego MVNoch keine Bewertungen
- Different MotorsDokument2 SeitenDifferent MotorsDiego MVNoch keine Bewertungen
- (Small Architecture Series) Esther Rivas Adrover-Deployable Structures-Laurence King Publishing (2015) PDFDokument161 Seiten(Small Architecture Series) Esther Rivas Adrover-Deployable Structures-Laurence King Publishing (2015) PDFDiego MV100% (1)
- 107 Nature PatternsDokument4 Seiten107 Nature PatternsDiego MVNoch keine Bewertungen
- Interplanetary CubeSatDokument30 SeitenInterplanetary CubeSatDiego MV100% (1)
- FlywheelDokument8 SeitenFlywheelAidil Syawani Kun100% (1)
- A Wheel-Based Stair-Climbing RobotDokument16 SeitenA Wheel-Based Stair-Climbing RobotDiego MVNoch keine Bewertungen
- Freer HongkongDokument6 SeitenFreer HongkongDiego MVNoch keine Bewertungen
- Declaration of Cosmic HumanityDokument2 SeitenDeclaration of Cosmic HumanityDiego MVNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Wheelchair Lift Executive SummaryDokument5 SeitenWheelchair Lift Executive SummaryIsabelle HanafiahNoch keine Bewertungen
- Chapter3-Alkenes and CycloalkenesDokument73 SeitenChapter3-Alkenes and CycloalkenesIain Choong WKNoch keine Bewertungen
- MESCO News January 2016Dokument4 SeitenMESCO News January 2016GoriZakirSalimNoch keine Bewertungen
- $MP 026 18Dokument12 Seiten$MP 026 18Safura BegumNoch keine Bewertungen
- South Asia On ShortwaveDokument15 SeitenSouth Asia On ShortwaveKasi XswlNoch keine Bewertungen
- SDHP CataloguesDokument12 SeitenSDHP CataloguesPuppala Laxmana PrasadNoch keine Bewertungen
- Protection For HV Line BayDokument3 SeitenProtection For HV Line BayhasaladNoch keine Bewertungen
- Q - Bae146 Inventory - SSS-Jan 2010Dokument6 SeitenQ - Bae146 Inventory - SSS-Jan 2010sssavNoch keine Bewertungen
- Manual COMPRESOR DEWALT PDFDokument56 SeitenManual COMPRESOR DEWALT PDFJorgeBrambilaNoch keine Bewertungen
- Introduction To Igor Programming PDFDokument33 SeitenIntroduction To Igor Programming PDFpaulklyuyevNoch keine Bewertungen
- GSM 06 InterfacesDokument17 SeitenGSM 06 Interfacesamitcool26Noch keine Bewertungen
- Lab 4Dokument14 SeitenLab 4rhinsaokiNoch keine Bewertungen
- VCS Commands Ease Coverage Efforts - Speed Simulation PDFDokument6 SeitenVCS Commands Ease Coverage Efforts - Speed Simulation PDFAnonymous k2nUzQgO6HNoch keine Bewertungen
- Investor Presentation (Company Update)Dokument42 SeitenInvestor Presentation (Company Update)Shyam SunderNoch keine Bewertungen
- Internal Arc IEC 61641 - EN - V07Dokument24 SeitenInternal Arc IEC 61641 - EN - V07arkupi100% (1)
- Hydrographic Survey: Ecg 305: Chapter 7Dokument24 SeitenHydrographic Survey: Ecg 305: Chapter 7Ahmad ZahirNoch keine Bewertungen
- Red MarsDokument16 SeitenRed Marsfz.fathima50% (2)
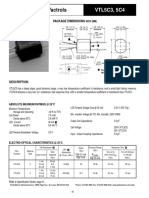
- Low Cost Axial Vactrols: VTL5C3, 5C4Dokument2 SeitenLow Cost Axial Vactrols: VTL5C3, 5C4sillyNoch keine Bewertungen
- Microsoft SQL Server 2005 Express Edition &Dokument95 SeitenMicrosoft SQL Server 2005 Express Edition &lgmep350Noch keine Bewertungen
- Chemistry Practicals Class 12Dokument32 SeitenChemistry Practicals Class 12Eshan Trivedi40% (5)
- How To Make AspirinDokument5 SeitenHow To Make Aspirincb67Noch keine Bewertungen
- Peri Up Flex Core ComponentsDokument50 SeitenPeri Up Flex Core ComponentsDavid BourcetNoch keine Bewertungen
- Repair of Small Household Appliances and Power ToolsDokument315 SeitenRepair of Small Household Appliances and Power ToolsahmadnawazjaswalNoch keine Bewertungen
- Zahvalnica Bla BlaDokument2 SeitenZahvalnica Bla BlaBiljanaJanjušević100% (1)
- PALRUF 100 Technical Guide (En)Dokument6 SeitenPALRUF 100 Technical Guide (En)mohammed nafethNoch keine Bewertungen
- Performance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilDokument14 SeitenPerformance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilSong FendaNoch keine Bewertungen
- 40 kVA Specification SheetDokument2 Seiten40 kVA Specification SheetAlex MohanNoch keine Bewertungen
- Technological University of The Philippines ManilaDokument1 SeiteTechnological University of The Philippines Manilalesterginno de guzmanNoch keine Bewertungen
- Standard Operating Procedure-Standard Maintenace ProcedureDokument11 SeitenStandard Operating Procedure-Standard Maintenace ProcedureVikram JitNoch keine Bewertungen
- 21 CFR 177Dokument6 Seiten21 CFR 177i_flyNoch keine Bewertungen