Das könnte Ihnen auch gefallen
- (Doi 10.1109 - ICIP.2016.7532952) Baddar, Wissam J. Son, Jisoo Kim, Dae Hoe Kim, Seong Tae Ro, - (IEEE 2016 IEEE International Conference On Image Processing (ICIP) - Phoenix, AZ, USA (2016.9.25Dokument5 Seiten(Doi 10.1109 - ICIP.2016.7532952) Baddar, Wissam J. Son, Jisoo Kim, Dae Hoe Kim, Seong Tae Ro, - (IEEE 2016 IEEE International Conference On Image Processing (ICIP) - Phoenix, AZ, USA (2016.9.25go88Noch keine Bewertungen
- Illumination-Robust Face Recognition Using Retina Modeling: Ngoc-Son Vu, Alice CaplierDokument4 SeitenIllumination-Robust Face Recognition Using Retina Modeling: Ngoc-Son Vu, Alice Capliergo88Noch keine Bewertungen
- Sc11 Cuda C BasicsDokument68 SeitenSc11 Cuda C BasicsPoncho CoetoNoch keine Bewertungen
- High Resolution Ultrasonic In-Line Inspection: Added Value and Special ApplicationsDokument15 SeitenHigh Resolution Ultrasonic In-Line Inspection: Added Value and Special Applicationsgo88Noch keine Bewertungen
- Istqb Foundation Level Syllabus - 2014Dokument78 SeitenIstqb Foundation Level Syllabus - 2014Joshua HolderNoch keine Bewertungen
- Sc11 Cuda C BasicsDokument68 SeitenSc11 Cuda C BasicsPoncho CoetoNoch keine Bewertungen
- Testing & People: The Magazine For Professional TestersDokument6 SeitenTesting & People: The Magazine For Professional Testersgo88Noch keine Bewertungen
- Envytools PDFDokument701 SeitenEnvytools PDFgo88Noch keine Bewertungen
- Sensor TechnologiesDokument10 SeitenSensor TechnologiesMiguel LiceagaNoch keine Bewertungen
- Robots and Sensor CloudsDokument97 SeitenRobots and Sensor CloudsWilliam Jaldin CorralesNoch keine Bewertungen
- Sensor TechnologiesDokument10 SeitenSensor TechnologiesMiguel LiceagaNoch keine Bewertungen
- Handbook of Face Recognition: (The Second Edition)Dokument40 SeitenHandbook of Face Recognition: (The Second Edition)Tsegaye YxtNoch keine Bewertungen
- Automotive Mechatronics PDFDokument549 SeitenAutomotive Mechatronics PDFgo8894% (18)
- Pi Cars RaspberryDokument34 SeitenPi Cars Raspberrygo88Noch keine Bewertungen
- Algorithm For Detection and Elimination False Minutiae in Fingerprint ImagesDokument6 SeitenAlgorithm For Detection and Elimination False Minutiae in Fingerprint Imagesgo88Noch keine Bewertungen
- Deep Learning Tutorial Release 0.1Dokument173 SeitenDeep Learning Tutorial Release 0.1lerhlerhNoch keine Bewertungen
- Handbook of Face Recognition: (The Second Edition)Dokument40 SeitenHandbook of Face Recognition: (The Second Edition)Tsegaye YxtNoch keine Bewertungen
- Handbook of Face Recognition: (The Second Edition)Dokument40 SeitenHandbook of Face Recognition: (The Second Edition)Tsegaye YxtNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- United States Patent (19) : Patent Number: Date of PatentDokument36 SeitenUnited States Patent (19) : Patent Number: Date of PatentGretel HanselNoch keine Bewertungen
- GE111 Exercise2-InteriorOrientationAerialPhotograph v6Dokument3 SeitenGE111 Exercise2-InteriorOrientationAerialPhotograph v6Princess Dianna Octavio CivilNoch keine Bewertungen
- Aristotle Athanasius Kircher: Principles of The Science of Colour, LikelyDokument1 SeiteAristotle Athanasius Kircher: Principles of The Science of Colour, LikelyRenNoch keine Bewertungen
- Eumig Projector P8 Automatic Novo User ManualDokument23 SeitenEumig Projector P8 Automatic Novo User Manualalmimotiempo71% (7)
- Shooting Self-Portraits: Short GuideDokument26 SeitenShooting Self-Portraits: Short GuideFlorenta Zamfir100% (2)
- PhysicsDokument17 SeitenPhysicsRahul Yadav100% (1)
- Fiber Optics and Optoelectronics R. P. KhareDokument4 SeitenFiber Optics and Optoelectronics R. P. KhareHarshit KapilNoch keine Bewertungen
- Comparison Chart: Sony HDR - FX1 Sony HVR - Z1 JVC GY - HD100/GY-HD101 Canon XLH1Dokument3 SeitenComparison Chart: Sony HDR - FX1 Sony HVR - Z1 JVC GY - HD100/GY-HD101 Canon XLH1DEEPAK GROVERNoch keine Bewertungen
- BilimeterDokument8 SeitenBilimetersaravanan100% (1)
- r05321003 Optoelectronic and Laser InstrumentationDokument5 Seitenr05321003 Optoelectronic and Laser InstrumentationSRINIVASA RAO GANTANoch keine Bewertungen
- Basic Physics 2 WEEK1 26022016Dokument36 SeitenBasic Physics 2 WEEK1 26022016SERAPHINENoch keine Bewertungen
- Introduction To Architectural VisualizationDokument50 SeitenIntroduction To Architectural VisualizationAmerico BarreiraNoch keine Bewertungen
- Concave Mirror Image FormationDokument3 SeitenConcave Mirror Image FormationMeghan KumarNoch keine Bewertungen
- History of PhotographyDokument11 SeitenHistory of Photographyapi-250842033Noch keine Bewertungen
- TUV T8 LampDokument4 SeitenTUV T8 LampveyneeNoch keine Bewertungen
- LightRunner - A Fiber Optic Communication Benchtop Laboratory With WDM PDFDokument25 SeitenLightRunner - A Fiber Optic Communication Benchtop Laboratory With WDM PDFhoainamcomitNoch keine Bewertungen
- EE Courses NewDokument15 SeitenEE Courses NewChao TurtleNoch keine Bewertungen
- Laser Telemetric SystemDokument5 SeitenLaser Telemetric SystemDurai Raj100% (1)
- El Rol de La Longitud AxialDokument6 SeitenEl Rol de La Longitud AxialVictor SanchezNoch keine Bewertungen
- Engineering Physics I Part A Qns.Dokument21 SeitenEngineering Physics I Part A Qns.Senthilnathan NagarajanNoch keine Bewertungen
- Hap CommnicationDokument13 SeitenHap CommnicationcoolshahabazNoch keine Bewertungen
- Brosur EMALED 200 NewDokument2 SeitenBrosur EMALED 200 NewAde DahliaNoch keine Bewertungen
- CT reconstruction algorithms noise comparisonDokument10 SeitenCT reconstruction algorithms noise comparisoneltonNoch keine Bewertungen
- Ford replacement headlight and taillight catalogDokument45 SeitenFord replacement headlight and taillight catalogLuis Manuel Eduardo ContrerasNoch keine Bewertungen
- Photogram Lesson RubricDokument2 SeitenPhotogram Lesson Rubricapi-295031678Noch keine Bewertungen
- LPR 09 Free 164389Dokument56 SeitenLPR 09 Free 164389Andrei OrzechowskiNoch keine Bewertungen
- Save My Exams! GCSE Physics Light RevisionDokument11 SeitenSave My Exams! GCSE Physics Light RevisionKim Sanghoo 8ANoch keine Bewertungen
- Lec - 24 - Vibrational Spectroscopy - Theoratical Bacgrouund - Origin of Molecular Vobration - Principles of SpectrosDokument10 SeitenLec - 24 - Vibrational Spectroscopy - Theoratical Bacgrouund - Origin of Molecular Vobration - Principles of SpectrosZahir Rayhan JhonNoch keine Bewertungen
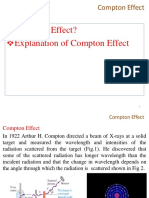
- Compton Effect? Explanation of Compton EffectDokument8 SeitenCompton Effect? Explanation of Compton EffectSuvro SahaNoch keine Bewertungen
- Yang 2012 NatcomDokument7 SeitenYang 2012 NatcomAthan CalugayNoch keine Bewertungen