Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Nandan Kanan ExpDokument2 SeitenNandan Kanan ExpAnshu KumarNoch keine Bewertungen
- Seattle Pedestrian Master Plan: 2018-2022 Implementation Plan and Progress ReportDokument68 SeitenSeattle Pedestrian Master Plan: 2018-2022 Implementation Plan and Progress ReportWestSeattleBlogNoch keine Bewertungen
- Safe Transport of Roll CagesDokument38 SeitenSafe Transport of Roll Cagesmask_goldNoch keine Bewertungen
- Road Accidents in KeralaDokument2 SeitenRoad Accidents in KeralaSam Varghese100% (1)
- TBT BULLETIN - Safe Operation of Dump Trucks - English PDFDokument1 SeiteTBT BULLETIN - Safe Operation of Dump Trucks - English PDF孔超100% (1)
- Conclusion (Bambuco)Dokument6 SeitenConclusion (Bambuco)Carlos Mauricio HermidaNoch keine Bewertungen
- Presented BY Coscap - SaDokument53 SeitenPresented BY Coscap - SaR.K.SHUKLANoch keine Bewertungen
- Rescue ManualDokument72 SeitenRescue ManualleruaitesNoch keine Bewertungen
- Raport de Coliziune Doua Nave (Ship Collision Report)Dokument94 SeitenRaport de Coliziune Doua Nave (Ship Collision Report)Laurentiu Matei100% (1)
- European Accident Research and Safety Report 2013 PDFDokument36 SeitenEuropean Accident Research and Safety Report 2013 PDFDMNoch keine Bewertungen
- Crash Test1Dokument76 SeitenCrash Test1Robin Roy100% (1)
- Flight Safety AssignmentDokument4 SeitenFlight Safety AssignmentYousef Al HashemiNoch keine Bewertungen
- Statistics: Causes of Fatal Accidents by Decade (Percentage)Dokument7 SeitenStatistics: Causes of Fatal Accidents by Decade (Percentage)persadanusantaraNoch keine Bewertungen
- Bi Form2Dokument3 SeitenBi Form2Nur Aien AluwiNoch keine Bewertungen
- Traffic Study & Traffic Flow TheoryDokument8 SeitenTraffic Study & Traffic Flow TheoryIkhwan Z.100% (3)
- English Proficiency Test For Aviation Set 2Dokument13 SeitenEnglish Proficiency Test For Aviation Set 2Jivko Kostadinov100% (4)
- IeltsreadingDokument12 SeitenIeltsreadingmsooflooNoch keine Bewertungen
- Avoiding Rear-End CollisionsDokument2 SeitenAvoiding Rear-End CollisionsRima AroraNoch keine Bewertungen
- PR ProjectDokument6 SeitenPR ProjectBusiness AnalysisNoch keine Bewertungen
- A1 B2 ListeningDokument3 SeitenA1 B2 ListeningGherghina RamonaNoch keine Bewertungen
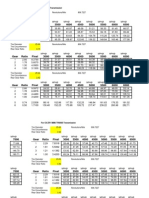
- Gear Ratio Transmission MPH CalculatorDokument3 SeitenGear Ratio Transmission MPH CalculatorGreg SuchomelNoch keine Bewertungen
- Analysis of Road AccidentsDokument10 SeitenAnalysis of Road Accidentsdhiraj_octNoch keine Bewertungen
- Sample Newsreport On AccidentsDokument2 SeitenSample Newsreport On AccidentsmszuenNoch keine Bewertungen
- Panama CanalDokument2 SeitenPanama CanalPrashant RajputNoch keine Bewertungen
- Assignment Road Safety ManagementDokument20 SeitenAssignment Road Safety ManagementPatrick DavisNoch keine Bewertungen
- Boom BagsakDokument2 SeitenBoom BagsakHa GikNoch keine Bewertungen
- Controlled Flight Into Terrain (CFIT) : The Problem That Never Went AwayDokument75 SeitenControlled Flight Into Terrain (CFIT) : The Problem That Never Went Awaygorgwashington100% (1)
- PNR v. I.a.c., 217 Scra 401Dokument12 SeitenPNR v. I.a.c., 217 Scra 401Eumell Alexis PaleNoch keine Bewertungen
- Six Family Members Die in Road AccidentDokument3 SeitenSix Family Members Die in Road AccidentHanan HasmiNoch keine Bewertungen
- MRev High Deck Bus Rollover PDFDokument54 SeitenMRev High Deck Bus Rollover PDFPuneet BahriNoch keine Bewertungen