Das könnte Ihnen auch gefallen
- Submitting Batch Jobs: Slurm On EcgateDokument26 SeitenSubmitting Batch Jobs: Slurm On EcgateDenis SaricNoch keine Bewertungen
- Marcelo Bielsa - Charla Brasil, Perugia PDFDokument8 SeitenMarcelo Bielsa - Charla Brasil, Perugia PDFDenis SaricNoch keine Bewertungen
- [22280596 - Baltic Journal of European Studies] Using Patent Development, Education Policy and Research and Development Expenditure Policy to Understand Differences between Countries_ The Case of Estonia and .pdfDokument31 Seiten[22280596 - Baltic Journal of European Studies] Using Patent Development, Education Policy and Research and Development Expenditure Policy to Understand Differences between Countries_ The Case of Estonia and .pdfDenis SaricNoch keine Bewertungen
- Amber 12 IntroDokument135 SeitenAmber 12 IntroDenis SaricNoch keine Bewertungen
- Amber 12 IntroDokument135 SeitenAmber 12 IntroDenis SaricNoch keine Bewertungen
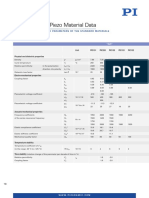
- Piezo Material Datasheet Cofefficients Temperature Measurements PDFDokument7 SeitenPiezo Material Datasheet Cofefficients Temperature Measurements PDFilmanhsnNoch keine Bewertungen
- [22280596 - Baltic Journal of European Studies] Using Patent Development, Education Policy and Research and Development Expenditure Policy to Understand Differences between Countries_ The Case of Estonia and .pdfDokument31 Seiten[22280596 - Baltic Journal of European Studies] Using Patent Development, Education Policy and Research and Development Expenditure Policy to Understand Differences between Countries_ The Case of Estonia and .pdfDenis SaricNoch keine Bewertungen
- Memento Mori - AOMDokument6 SeitenMemento Mori - AOMDenis SaricNoch keine Bewertungen
- Money (/sections/money) More +Dokument4 SeitenMoney (/sections/money) More +Denis SaricNoch keine Bewertungen
- Comparison of Hamstring Muscle ActivationDokument10 SeitenComparison of Hamstring Muscle ActivationDenis SaricNoch keine Bewertungen
- Just A Kid From Tuilla - David VillaDokument6 SeitenJust A Kid From Tuilla - David VillaDenis SaricNoch keine Bewertungen
- Coming Up - KimmichDokument9 SeitenComing Up - KimmichDenis SaricNoch keine Bewertungen
- Novak Djokovic - Sporting SuperheroDokument14 SeitenNovak Djokovic - Sporting SuperheroDenis SaricNoch keine Bewertungen
- Napoleon HIll - LoSDokument6 SeitenNapoleon HIll - LoSDenis SaricNoch keine Bewertungen
- Tolstoy - DiaryDokument6 SeitenTolstoy - DiaryDenis SaricNoch keine Bewertungen
- Mumford - Meditation - Kobe, Michael...Dokument7 SeitenMumford - Meditation - Kobe, Michael...Denis SaricNoch keine Bewertungen
- Jack Ma - AlibabaDokument7 SeitenJack Ma - AlibabaDenis SaricNoch keine Bewertungen
- Napoleon HIll - LoSDokument6 SeitenNapoleon HIll - LoSDenis SaricNoch keine Bewertungen
- Brain Training Secrets of Olymic AthletesDokument6 SeitenBrain Training Secrets of Olymic AthletesDenis SaricNoch keine Bewertungen
- Joineu-See (I, Ii, Iii, Iv, Penta) : Erasmus Mundus Action 2 - Strand 1Dokument13 SeitenJoineu-See (I, Ii, Iii, Iv, Penta) : Erasmus Mundus Action 2 - Strand 1Denis SaricNoch keine Bewertungen
- Explosive Isometrics Speed Training With The Brakes On EliteDokument5 SeitenExplosive Isometrics Speed Training With The Brakes On EliteDenis SaricNoch keine Bewertungen
- Conor McGregorDokument7 SeitenConor McGregorDenis SaricNoch keine Bewertungen
- MATH 304 Linear Algebra Matrix ExponentialsDokument13 SeitenMATH 304 Linear Algebra Matrix ExponentialsDenis SaricNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Roland RS-5 Manual Del UsuarioDokument180 SeitenRoland RS-5 Manual Del Usuariodavevad12345Noch keine Bewertungen
- Government Schemes: Ministry of Agriculture and Farmers' WelfareDokument29 SeitenGovernment Schemes: Ministry of Agriculture and Farmers' WelfareDushyant MudgalNoch keine Bewertungen
- Hira - For Shot Blasting & Upto 2nd Coat of PaintingDokument15 SeitenHira - For Shot Blasting & Upto 2nd Coat of PaintingDhaneswar SwainNoch keine Bewertungen
- Assay - Alumina and Magnesia Oral SuspensionDokument3 SeitenAssay - Alumina and Magnesia Oral SuspensionmaimaiNoch keine Bewertungen
- Full Site PDFDokument23 SeitenFull Site PDFpursuwNoch keine Bewertungen
- Mechanical Reasoning - Test 2: 40 QuestionsDokument14 SeitenMechanical Reasoning - Test 2: 40 Questionskyloz60% (5)
- 10 de Thi Tieng Anh Hướng Dẫn Giải Chi TiếtDokument145 Seiten10 de Thi Tieng Anh Hướng Dẫn Giải Chi TiếtVuong DiepNoch keine Bewertungen
- First Periodical Exam Math 8Dokument2 SeitenFirst Periodical Exam Math 8Joanne88% (8)
- EPTT5100 - Pressure - Temperature Sensor - 1308 - GDokument2 SeitenEPTT5100 - Pressure - Temperature Sensor - 1308 - GHendry Putra RahadiNoch keine Bewertungen
- Action Research MAPEHDokument9 SeitenAction Research MAPEHEloPoPo100% (4)
- WhittleMIME 413-513 Workshop 1 2014Dokument26 SeitenWhittleMIME 413-513 Workshop 1 2014Diana Catalina Munera0% (1)
- C-81-9903-17-82 Halal 100g 2024-06-08Dokument1 SeiteC-81-9903-17-82 Halal 100g 2024-06-08NURUL FAUZANY BINTI MOHD BASARUDDINNoch keine Bewertungen
- Brochure Smart Grid Foundation CourseDokument6 SeitenBrochure Smart Grid Foundation CourseKULDEEP MEENANoch keine Bewertungen
- Peethas ListDokument1 SeitePeethas ListChetan PrajapatiNoch keine Bewertungen
- Rig 166 Data SheetDokument2 SeitenRig 166 Data SheetEstuardo OlanNoch keine Bewertungen
- Author Name Title Paper/Submission ID Submission Date Total Pages Document TypeDokument32 SeitenAuthor Name Title Paper/Submission ID Submission Date Total Pages Document TypeArka ChakrabortyNoch keine Bewertungen
- Obs and Gynae PassmedDokument7 SeitenObs and Gynae PassmedrahulNoch keine Bewertungen
- 9trffi&hpr.! Ni-: Use E EDokument2 Seiten9trffi&hpr.! Ni-: Use E ERafi ZulfiNoch keine Bewertungen
- Coulomb's Law and Electric Field Intensity: Engineering ElectromagneticsDokument24 SeitenCoulomb's Law and Electric Field Intensity: Engineering ElectromagneticsKenn SenadosNoch keine Bewertungen
- Comparative Superlative With Key PDFDokument1 SeiteComparative Superlative With Key PDFAnonymous 8AHCMsPuNoch keine Bewertungen
- Annals of The New York Academy of Sciences - 2023 - Hess - Accelerating Action To Reduce Anemia Review of Causes and RiskDokument13 SeitenAnnals of The New York Academy of Sciences - 2023 - Hess - Accelerating Action To Reduce Anemia Review of Causes and RiskIdmNoch keine Bewertungen
- Gulika in Vedic AstrologyDokument8 SeitenGulika in Vedic AstrologyCatchdgreen100% (1)
- kAmAxI Muka Panchashati EngDokument25 SeitenkAmAxI Muka Panchashati EngSrinathvr100% (1)
- Vein Type DepositDokument7 SeitenVein Type DepositHarisArmadiNoch keine Bewertungen
- Adsorption Processes For Water Treatment and Purification PDFDokument266 SeitenAdsorption Processes For Water Treatment and Purification PDFVictor Rezende Moreira100% (1)
- A Study On Risk Assessment in The Construction of High-Rise BuildingsDokument5 SeitenA Study On Risk Assessment in The Construction of High-Rise BuildingsMohamedSaidNoch keine Bewertungen
- 9500 MPR Wireless TransmissionDokument46 Seiten9500 MPR Wireless TransmissionMahdi AhmadiNoch keine Bewertungen
- SUNANDA Hack Aid Plast SPL PDFDokument2 SeitenSUNANDA Hack Aid Plast SPL PDFSheezan KhanNoch keine Bewertungen
- Unit 21Dokument22 SeitenUnit 21Yuni IndahNoch keine Bewertungen
- Super GisDokument535 SeitenSuper GisNegrescu MariusNoch keine Bewertungen


![[22280596 - Baltic Journal of European Studies] Using Patent Development, Education Policy and Research and Development Expenditure Policy to Understand Differences between Countries_ The Case of Estonia and .pdf](https://imgv2-2-f.scribdassets.com/img/document/469950860/149x198/7fbddd94c2/1595367800?v=1)