Das könnte Ihnen auch gefallen
- Advanced Steel StructuresDokument1 SeiteAdvanced Steel StructuresRohan KulkarniNoch keine Bewertungen
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDokument8 SeitenOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaNoch keine Bewertungen
- Chapter 1 Introduction To Steel DesignDokument33 SeitenChapter 1 Introduction To Steel DesignRami Demachki100% (1)
- 21a ShearFlow ShearCenterDokument48 Seiten21a ShearFlow ShearCenterJames BlockeNoch keine Bewertungen
- A New Approach For Design of Steel Beam-Columns Our A.Dokument32 SeitenA New Approach For Design of Steel Beam-Columns Our A.mbrown4382Noch keine Bewertungen
- Ansys Analysis-Trolley Beam 3T1Dokument13 SeitenAnsys Analysis-Trolley Beam 3T1Ye Wint ThuNoch keine Bewertungen
- Eccentric LoadDokument6 SeitenEccentric LoadAtish Kumar100% (3)
- Classification of Cross SectionDokument19 SeitenClassification of Cross SectionAmirul Asyraf Bin Mohd BekeriNoch keine Bewertungen
- Stability of ColumnsDokument45 SeitenStability of ColumnsjemnesNoch keine Bewertungen
- Critical Axial Load For Torsional and Flexural Torsional Buckling ModesDokument5 SeitenCritical Axial Load For Torsional and Flexural Torsional Buckling ModesBobaru MariusNoch keine Bewertungen
- 416 - Steel Members Design PDFDokument195 Seiten416 - Steel Members Design PDFdinoNoch keine Bewertungen
- Design For Torsion For Steel StructureDokument32 SeitenDesign For Torsion For Steel StructurePrantik Adhar Samanta100% (1)
- Torsion of Laminated Composite BeamsDokument28 SeitenTorsion of Laminated Composite BeamsFlmkaneNoch keine Bewertungen
- Formula Sheet 3-Steel DesignDokument7 SeitenFormula Sheet 3-Steel DesignAddrien DanielNoch keine Bewertungen
- Deflections - Conjugate BeamDokument13 SeitenDeflections - Conjugate BeamAfia S HameedNoch keine Bewertungen
- Beam DeflectionDokument16 SeitenBeam DeflectionPrashant MavaleNoch keine Bewertungen
- Lecture 10: Flexibility Method for Temperature, Prestrain, and Support DisplacementDokument32 SeitenLecture 10: Flexibility Method for Temperature, Prestrain, and Support DisplacementSarah SullivanNoch keine Bewertungen
- Beam ColumnsDokument21 SeitenBeam ColumnsSherif Mohamed Ibrahim100% (1)
- AAA - Stability - Lecture - SummaryDokument146 SeitenAAA - Stability - Lecture - SummaryIvan EstradaNoch keine Bewertungen
- Design of Compression MembersDokument56 SeitenDesign of Compression Memberstshepo hlakudiNoch keine Bewertungen
- CAD/CAM/CAE analysis of notched beam bucklingDokument3 SeitenCAD/CAM/CAE analysis of notched beam bucklingGiri DharanNoch keine Bewertungen
- Plate Buckling NotesDokument0 SeitenPlate Buckling NotesSharyn PolleyNoch keine Bewertungen
- Shear CenterDokument12 SeitenShear CenterGuru MaheshNoch keine Bewertungen
- Minimum Potential EnergyDokument9 SeitenMinimum Potential EnergyBright MuzaNoch keine Bewertungen
- Chapter 1 StressDokument39 SeitenChapter 1 StressMaipenrai MemeeNoch keine Bewertungen
- 3 - Compression Member PDFDokument43 Seiten3 - Compression Member PDFYetty Oktavianita100% (2)
- Lecture 3 Bec304Dokument35 SeitenLecture 3 Bec304Mohd Nizam ShakimonNoch keine Bewertungen
- Connection DesignDokument33 SeitenConnection Designjesus curielNoch keine Bewertungen
- Modelling and Analysis of Jacket PlatformDokument11 SeitenModelling and Analysis of Jacket PlatformDr R Panneer SelvamNoch keine Bewertungen
- Chapter 7 BoltDokument38 SeitenChapter 7 BoltRamesh P KoiralaNoch keine Bewertungen
- Chapter18 Beam Subjected To Torsion & Bending IIDokument29 SeitenChapter18 Beam Subjected To Torsion & Bending IIVincent TengNoch keine Bewertungen
- Elastic Lateral Torsional BucklingDokument3 SeitenElastic Lateral Torsional BucklingRuchit ParmarNoch keine Bewertungen
- Wind Load On The RoofDokument14 SeitenWind Load On The RoofHussein HasenNoch keine Bewertungen
- Design For Buckling Columns and PlatesDokument20 SeitenDesign For Buckling Columns and Platesdarebusi1100% (1)
- Theory of Elasticity Supplementary Notes: J. N. ReddyDokument52 SeitenTheory of Elasticity Supplementary Notes: J. N. ReddykkhemmoNoch keine Bewertungen
- Plane Sections Remain Plane. Y: CompressionDokument5 SeitenPlane Sections Remain Plane. Y: CompressionakanyilmazNoch keine Bewertungen
- Lec9 Strength Design Methoddoubly Reinforced Beams 160214192041 PDFDokument8 SeitenLec9 Strength Design Methoddoubly Reinforced Beams 160214192041 PDFဒုကၡ သစၥာNoch keine Bewertungen
- Chapter 4 - Axial LoadingDokument33 SeitenChapter 4 - Axial LoadingMaipenrai Memee100% (1)
- Structural Stability and DesignDokument192 SeitenStructural Stability and DesignSwarna RkNoch keine Bewertungen
- Shear CenterDokument8 SeitenShear CenterArun BattuNoch keine Bewertungen
- Selected Homework Problem Answers: Unified Design of Steel Structures, 3rd EditionDokument20 SeitenSelected Homework Problem Answers: Unified Design of Steel Structures, 3rd EditionJames CE0% (1)
- Time Period Calculation in ETABS As Per IS 1893 Part 1Dokument2 SeitenTime Period Calculation in ETABS As Per IS 1893 Part 1NAYAN RANPURA100% (1)
- 01-15-14 Concrete Damaged Plasticity ModelDokument13 Seiten01-15-14 Concrete Damaged Plasticity ModelatchzytNoch keine Bewertungen
- Bending Stresses in BeamDokument29 SeitenBending Stresses in BeamilhammkaNoch keine Bewertungen
- Thick Plate On Elastic FoundationDokument21 SeitenThick Plate On Elastic FoundationHasanain Almusawi100% (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsVon EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNoch keine Bewertungen
- DX E X A X P: Axial LoadsDokument5 SeitenDX E X A X P: Axial LoadsvijshahNoch keine Bewertungen
- Understanding Stresses in BeamsDokument15 SeitenUnderstanding Stresses in BeamsdonjazonNoch keine Bewertungen
- Plane Stress TransformDokument24 SeitenPlane Stress Transformsandrock92Noch keine Bewertungen
- Mec Sol 15Dokument30 SeitenMec Sol 15Vinícius GonçalvesNoch keine Bewertungen
- Shear stresses and shear centre analysisDokument9 SeitenShear stresses and shear centre analysisNithesh ShamNoch keine Bewertungen
- Handouts D8 1Dokument8 SeitenHandouts D8 1ozzy22Noch keine Bewertungen
- Formula Table Solid MechanicsDokument26 SeitenFormula Table Solid MechanicsmechfunNoch keine Bewertungen
- Solid Mechanics FormulasDokument26 SeitenSolid Mechanics FormulasLindi NewmanNoch keine Bewertungen
- Shear Centre of Thin-Walled Open SectionsDokument3 SeitenShear Centre of Thin-Walled Open SectionsAdil GhazanfarNoch keine Bewertungen
- Week 7 Truss DesignDokument39 SeitenWeek 7 Truss DesignFoo He XuanNoch keine Bewertungen
- Bending, Torsion, and StressDokument18 SeitenBending, Torsion, and StressnasirfahimNoch keine Bewertungen
- MD 2Dokument33 SeitenMD 2Wilfredo Nieves OsoriaNoch keine Bewertungen
- Beam Theory Basics and Bending StressDokument12 SeitenBeam Theory Basics and Bending Stressabouelrich188Noch keine Bewertungen
- Seismic Analysis of Multistoried BuildingDokument8 SeitenSeismic Analysis of Multistoried Buildingjakeer7Noch keine Bewertungen
- American steel grades A36, A572, A588, A709, A913, A992 propertiesDokument1 SeiteAmerican steel grades A36, A572, A588, A709, A913, A992 propertiesRaymondLeungNoch keine Bewertungen
- Seismic Design Load Distribution in Steel FrameDokument8 SeitenSeismic Design Load Distribution in Steel Framejakeer7Noch keine Bewertungen
- Response Spectrum Analysis For Regular Multistory Structure in Seismic Zone IIIDokument6 SeitenResponse Spectrum Analysis For Regular Multistory Structure in Seismic Zone IIIjakeer7Noch keine Bewertungen
- Foundations For Industrial Machines and Earthquake Effects-InfoDokument17 SeitenFoundations For Industrial Machines and Earthquake Effects-Infojakeer7Noch keine Bewertungen
- Structural Forces in Beams and Frames (38chDokument42 SeitenStructural Forces in Beams and Frames (38chjakeer7Noch keine Bewertungen
- Dynamic Analysis of Machine Foundation-INFODokument8 SeitenDynamic Analysis of Machine Foundation-INFOjakeer7Noch keine Bewertungen
- American steel grades A36, A572, A588, A709, A913, A992 propertiesDokument1 SeiteAmerican steel grades A36, A572, A588, A709, A913, A992 propertiesRaymondLeungNoch keine Bewertungen
- Day 29 Dynamic Analysis Using Response Spectrum MethodDokument9 SeitenDay 29 Dynamic Analysis Using Response Spectrum Methodjakeer7Noch keine Bewertungen
- Aci 351 3R PDFDokument26 SeitenAci 351 3R PDFLakshmi PrabhaNoch keine Bewertungen
- A Comparative Analysis On Absolute and SRSSDokument4 SeitenA Comparative Analysis On Absolute and SRSSjakeer7Noch keine Bewertungen
- American steel grades A36, A572, A588, A709, A913, A992 propertiesDokument1 SeiteAmerican steel grades A36, A572, A588, A709, A913, A992 propertiesRaymondLeungNoch keine Bewertungen
- Process Industry Practices Civil: PIP CVC01015 Civil Design CriteriaDokument17 SeitenProcess Industry Practices Civil: PIP CVC01015 Civil Design Criteriajakeer7Noch keine Bewertungen
- Aci 351 3R PDFDokument26 SeitenAci 351 3R PDFLakshmi PrabhaNoch keine Bewertungen
- PIP STE03350 Vertical Vessel Foundation Design Guide 12-2008 (Last Upd) PDFDokument33 SeitenPIP STE03350 Vertical Vessel Foundation Design Guide 12-2008 (Last Upd) PDFbute79100% (3)
- Offshore Structural Analysis MethodsDokument10 SeitenOffshore Structural Analysis Methodsjakeer7Noch keine Bewertungen
- Machine TypesDokument25 SeitenMachine TypesAnonymous xcFcOgMiNoch keine Bewertungen
- Plastic vs Elastic Section Modulus: Zp and Ze ExplainedDokument1 SeitePlastic vs Elastic Section Modulus: Zp and Ze Explainedjakeer7Noch keine Bewertungen
- Analysis and Design of Vertical Vessel FoundationDokument46 SeitenAnalysis and Design of Vertical Vessel Foundationjakeer7Noch keine Bewertungen
- Analysis of Structural Member Systems - Jerome J. Connor PDFDokument617 SeitenAnalysis of Structural Member Systems - Jerome J. Connor PDFDiego Leonel Suárez Vásquez100% (1)
- Offshore Structural Analysis MethodsDokument10 SeitenOffshore Structural Analysis Methodsjakeer7Noch keine Bewertungen
- Ngineering Preadsheets - Co.uk: Analysis of Equal Span Continuous Beams With Uniformly Distributed LoadsDokument1 SeiteNgineering Preadsheets - Co.uk: Analysis of Equal Span Continuous Beams With Uniformly Distributed Loadsjakeer7Noch keine Bewertungen
- Typical Mat Foundation Design ProcedureDokument7 SeitenTypical Mat Foundation Design Procedurejakeer7Noch keine Bewertungen
- Bolt Load Capacity Tables for EngineersDokument1 SeiteBolt Load Capacity Tables for Engineersjakeer7Noch keine Bewertungen
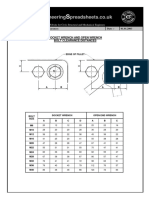
- Bolt Clearances 01.01.03Dokument1 SeiteBolt Clearances 01.01.03jakeer7Noch keine Bewertungen
- Mat Foundation 2Dokument355 SeitenMat Foundation 2Wondwosen BelayNoch keine Bewertungen
- Bolt Capacity Diagrams To BS5950 01.01.03 PDFDokument1 SeiteBolt Capacity Diagrams To BS5950 01.01.03 PDFjakeer7Noch keine Bewertungen
- Mat Foundation 2Dokument355 SeitenMat Foundation 2Wondwosen BelayNoch keine Bewertungen
- YÖKDİL HAP KELİME SORULARI WWW - Sinavkampi.com - TRDokument14 SeitenYÖKDİL HAP KELİME SORULARI WWW - Sinavkampi.com - TRDemet KöseoğluNoch keine Bewertungen
- STPPT1 Life Processes Interactions and AdaptationsDokument24 SeitenSTPPT1 Life Processes Interactions and AdaptationsIVAN GLENN NAGALNoch keine Bewertungen
- Sartorius YDP20-0CE PrinterDokument116 SeitenSartorius YDP20-0CE Printerblockhead135399Noch keine Bewertungen
- SankarDokument8 SeitenSankarkarteek143Noch keine Bewertungen
- 15 Pawn FormationsDokument11 Seiten15 Pawn FormationsCMCNoch keine Bewertungen
- S4 Aceiteka 2017 AccountsDokument7 SeitenS4 Aceiteka 2017 AccountsEremu ThomasNoch keine Bewertungen
- Financial Accounting Essentials You Always Wanted To Know: 4th EditionDokument21 SeitenFinancial Accounting Essentials You Always Wanted To Know: 4th EditionVibrant Publishers100% (2)
- 00 EAN Abstract 2016 BookDokument956 Seiten00 EAN Abstract 2016 BookAlexandra MardareNoch keine Bewertungen
- Pronunciation + Listening Practice - Ep. 4 PDFDokument3 SeitenPronunciation + Listening Practice - Ep. 4 PDFHoang Nguyen MinhNoch keine Bewertungen
- Ic 78Dokument143 SeitenIc 78Carlos AzañedoNoch keine Bewertungen
- Eve Ross - 10.3a - Note - Images in Concave MirrorsDokument8 SeitenEve Ross - 10.3a - Note - Images in Concave MirrorsEve RossNoch keine Bewertungen
- Government Procurement Reform Act under RA 9184Dokument50 SeitenGovernment Procurement Reform Act under RA 9184Maricel Anober100% (1)
- Chassis Cab: Super DutyDokument17 SeitenChassis Cab: Super DutyJoeNoch keine Bewertungen
- C-Pro Giga: Programmable ControllersDokument46 SeitenC-Pro Giga: Programmable ControllersHeli wilsonNoch keine Bewertungen
- VAT Return - 9.1 - May-2023 - Sumiya TradeDokument63 SeitenVAT Return - 9.1 - May-2023 - Sumiya TradeMD shohelNoch keine Bewertungen
- Sampling and Data CollectionDokument11 SeitenSampling and Data CollectionFil Luayon40% (5)
- Beta12CX Med Vented Cabinet High SPL Mid/High MonitorDokument10 SeitenBeta12CX Med Vented Cabinet High SPL Mid/High MonitorMarius GligorNoch keine Bewertungen
- Semiconductor KIA1117BS/BF/BPI00 KIA1117BS/BF/BPI50: Technical DataDokument6 SeitenSemiconductor KIA1117BS/BF/BPI00 KIA1117BS/BF/BPI50: Technical DataRadu PaulNoch keine Bewertungen
- Subject + Was/were/v II + Object/ComplementDokument6 SeitenSubject + Was/were/v II + Object/ComplementRini TiaraNoch keine Bewertungen
- Application of Electro PneumaticsDokument2 SeitenApplication of Electro PneumaticsMaribel C. MagbanuaNoch keine Bewertungen
- Micropropagation and Microbes DocumentDokument20 SeitenMicropropagation and Microbes DocumentRavneet KaurNoch keine Bewertungen
- Series: Instruction ManualDokument10 SeitenSeries: Instruction Manualjbernal89Noch keine Bewertungen
- Ultrasonic Flow Meter UltraFlow 2500 Data SheetDokument4 SeitenUltrasonic Flow Meter UltraFlow 2500 Data SheetSaman Raza KhanNoch keine Bewertungen
- Timss & Pisa Models: Khalidah AhmadDokument51 SeitenTimss & Pisa Models: Khalidah AhmadMirahmad FadzlyNoch keine Bewertungen
- Photopia User's GuideDokument307 SeitenPhotopia User's GuideJesus VNoch keine Bewertungen
- Data Teknis Gedung Eksisting 3 - As Build - Pemohon - Jika Tidak Ada Kita Yang BuatDokument29 SeitenData Teknis Gedung Eksisting 3 - As Build - Pemohon - Jika Tidak Ada Kita Yang Buatagusta galileoNoch keine Bewertungen
- CPR Covid-19Dokument29 SeitenCPR Covid-19Triana TingNoch keine Bewertungen
- Digging For DinosDokument7 SeitenDigging For Dinosapi-645698424Noch keine Bewertungen
- Golar Viking Case Study NSFMWDokument7 SeitenGolar Viking Case Study NSFMWMatteo ConciNoch keine Bewertungen
- Nihon Kohden Cns 6201 Administrator S Guide PDFDokument171 SeitenNihon Kohden Cns 6201 Administrator S Guide PDFjhon edison rojas villadaNoch keine Bewertungen