Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Formula SheetDokument2 SeitenFormula SheetbestniazNoch keine Bewertungen
- Week7 - IDokument2 SeitenWeek7 - IbestniazNoch keine Bewertungen
- Lec 4Dokument5 SeitenLec 4bestniazNoch keine Bewertungen
- Fluid Ass2,3Dokument9 SeitenFluid Ass2,3bestniazNoch keine Bewertungen
- Assignment 2 Thermodynamic TablesDokument1 SeiteAssignment 2 Thermodynamic TablesbestniazNoch keine Bewertungen
- Assignment Using EES SoftwareDokument1 SeiteAssignment Using EES SoftwarebestniazNoch keine Bewertungen
- ISVIV2020Dokument2 SeitenISVIV2020bestniazNoch keine Bewertungen
- HEC Advance Countries ListDokument2 SeitenHEC Advance Countries Listbestniaz100% (1)
- Steel Mils in PakistanDokument9 SeitenSteel Mils in Pakistanbestniaz100% (3)
- Mechanical Behavior and Fracture of Engineering Materials PDFDokument253 SeitenMechanical Behavior and Fracture of Engineering Materials PDFbestniaz100% (3)
- Fluent Tutorial Sites GHGDokument1 SeiteFluent Tutorial Sites GHGbestniazNoch keine Bewertungen
- Mechanical Behavior and Fracture of Engineering Materials PDFDokument253 SeitenMechanical Behavior and Fracture of Engineering Materials PDFbestniaz100% (3)
- Personal Bond Refund FormDokument2 SeitenPersonal Bond Refund FormbestniazNoch keine Bewertungen
- Construction Steel2017 BrochureDokument9 SeitenConstruction Steel2017 BrochurebestniazNoch keine Bewertungen
- HEC Advance Countries ListDokument2 SeitenHEC Advance Countries Listbestniaz100% (1)
- Journal of Management 2014 Gonzalez Mulé 0149206314535443Dokument16 SeitenJournal of Management 2014 Gonzalez Mulé 0149206314535443bestniazNoch keine Bewertungen
- Riser VIV and Its Numerical Simulation: Kevin HuangDokument6 SeitenRiser VIV and Its Numerical Simulation: Kevin HuangbestniazNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Air System Sizing Summary For F1-FF-AHU-04Dokument10 SeitenAir System Sizing Summary For F1-FF-AHU-04mhmdjdgmailcomNoch keine Bewertungen
- Civil Book List New 1Dokument64 SeitenCivil Book List New 1Sulakshna TpNoch keine Bewertungen
- Tolerance As Per AWS D1.1Dokument3 SeitenTolerance As Per AWS D1.1milind bedarkarNoch keine Bewertungen
- Beam Deflections and Stresses During LiftingDokument10 SeitenBeam Deflections and Stresses During LiftingharshadNoch keine Bewertungen
- Drop Structure DesignDokument82 SeitenDrop Structure DesignAbel DemNoch keine Bewertungen
- Gujarat Technological University: InstructionsDokument2 SeitenGujarat Technological University: Instructionssameer_m_daniNoch keine Bewertungen
- Ground Floor Hvac LayoutDokument1 SeiteGround Floor Hvac LayoutMohammed AzharNoch keine Bewertungen
- TEL-SRPD-EGD-CIV-001 Design Basis For Civil and Structural Rev B PDFDokument31 SeitenTEL-SRPD-EGD-CIV-001 Design Basis For Civil and Structural Rev B PDFMuhammad LutfhiNoch keine Bewertungen
- Engenharia Hidraulica - InglesDokument8 SeitenEngenharia Hidraulica - InglesPekirNoch keine Bewertungen
- BTC English ESIAs Amended Turkey EIA Final Incorporating Comments Content BTC EIA Volume 2 Section 4Dokument94 SeitenBTC English ESIAs Amended Turkey EIA Final Incorporating Comments Content BTC EIA Volume 2 Section 4vuongNoch keine Bewertungen
- Shear and Torsion in Concrete StructuresDokument202 SeitenShear and Torsion in Concrete StructuresRobert VochescuNoch keine Bewertungen
- 4 Question 2 Worked ExampleDokument8 Seiten4 Question 2 Worked ExampleTomislav ŠimagNoch keine Bewertungen
- Wind Loads On Buildings With Attached CanopiesDokument8 SeitenWind Loads On Buildings With Attached Canopiesอภิรักษ์ มานะกิจศิริสุทธิNoch keine Bewertungen
- Enciclopedia SismicaDokument3.996 SeitenEnciclopedia SismicaPaula100% (2)
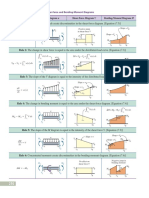
- Equation Load Diagram W Shear-Force Diagram V Bending-Moment Diagram MDokument1 SeiteEquation Load Diagram W Shear-Force Diagram V Bending-Moment Diagram MAndres Felipe Prieto AlarconNoch keine Bewertungen
- Is 6966 1989 (PART 1) Hydraulics Design of Barrages and WeirsDokument12 SeitenIs 6966 1989 (PART 1) Hydraulics Design of Barrages and Weirsarvind.singhNoch keine Bewertungen
- Multistage Restriction Orifice Assembly PDFDokument1 SeiteMultistage Restriction Orifice Assembly PDFlimin zhang100% (1)
- Releasing Moment For Secondary MemberDokument7 SeitenReleasing Moment For Secondary MemberGautam PaulNoch keine Bewertungen
- (Fixed Head Pile) : Pile Cap Bott GLDokument2 Seiten(Fixed Head Pile) : Pile Cap Bott GLShivendra KumarNoch keine Bewertungen
- AAMA-NPEA-NSA-2100-12 Specification For SunroomsDokument14 SeitenAAMA-NPEA-NSA-2100-12 Specification For SunroomsRey Eduard Q. UmelNoch keine Bewertungen
- Draft Report - BankliDokument95 SeitenDraft Report - BankliSumit KumarNoch keine Bewertungen
- 2 4 Ce225 Research - Paper Group 4Dokument7 Seiten2 4 Ce225 Research - Paper Group 4JEAN KATHLEEN SORIANONoch keine Bewertungen
- PEXAL and MIXAL Pipes, The Solution For Floor Heating SystemsDokument5 SeitenPEXAL and MIXAL Pipes, The Solution For Floor Heating Systemsvalentinlupascu33Noch keine Bewertungen
- CE 162 MidtermsDokument2 SeitenCE 162 MidtermsRoEm'z Suarez PaIlagoNoch keine Bewertungen
- Daily Progress ReportDokument2 SeitenDaily Progress ReportStephen Harold RayosoNoch keine Bewertungen
- AISC DG02 Example 002Dokument6 SeitenAISC DG02 Example 002f tshNoch keine Bewertungen
- RabiyaDokument19 SeitenRabiyaningshaNoch keine Bewertungen
- Refrigeration & Ac Spare PartsDokument22 SeitenRefrigeration & Ac Spare Partsjosue chilinNoch keine Bewertungen
- Study On Slope Stability of Earthen DamsDokument7 SeitenStudy On Slope Stability of Earthen Damssharvan10Noch keine Bewertungen
- Steel Structures-Lecture 5 PDFDokument23 SeitenSteel Structures-Lecture 5 PDFAli FarooqNoch keine Bewertungen