Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Tendering CVCC GuidelinesDokument1 SeiteTendering CVCC GuidelinesSARATH KRISHNAKUMARNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Valve Sizing and Selection: FREE ResourcesDokument6 SeitenValve Sizing and Selection: FREE ResourcesSARATH KRISHNAKUMARNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Tendering CVCC GuidelinesDokument2 SeitenTendering CVCC GuidelinesSARATH KRISHNAKUMARNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Cric.15.5.06 - 005CRD019 PDFDokument1 SeiteCric.15.5.06 - 005CRD019 PDFSARATH KRISHNAKUMARNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Pipe ThicknessDokument1 SeitePipe ThicknessSARATH KRISHNAKUMARNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Aws C1.5 2015Dokument2 SeitenAws C1.5 2015SARATH KRISHNAKUMAR0% (3)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Paper No. ICP33: in Line Inspection (ILI) Frequency For Cross Country PipelinesDokument7 SeitenPaper No. ICP33: in Line Inspection (ILI) Frequency For Cross Country PipelinesSARATH KRISHNAKUMARNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 005 CRD 012Dokument2 Seiten005 CRD 012sachinbhele94Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Tendering CVCC GuidelinesDokument1 SeiteTendering CVCC GuidelinesSARATH KRISHNAKUMARNoch keine Bewertungen
- Relief Valve Bench Testing ProceduresDokument1 SeiteRelief Valve Bench Testing ProceduresSARATH KRISHNAKUMARNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- O & M STD PlugDokument13 SeitenO & M STD PlugSARATH KRISHNAKUMARNoch keine Bewertungen
- Al MG AlloysDokument2 SeitenAl MG AlloysSARATH KRISHNAKUMARNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- MSDS LPGDokument3 SeitenMSDS LPGSARATH KRISHNAKUMARNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Two Phase Flow BibliographyDokument41 SeitenTwo Phase Flow BibliographyShiv Pratap SinghNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Injection Point Vs Mixing PointDokument1 SeiteInjection Point Vs Mixing PointSARATH KRISHNAKUMAR0% (1)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- API Codes Concerning Relief ValvesDokument1 SeiteAPI Codes Concerning Relief ValvesSARATH KRISHNAKUMARNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Sructural Steel StandardsDokument1 SeiteSructural Steel StandardsSARATH KRISHNAKUMARNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Ejector TroubleshootDokument1 SeiteEjector TroubleshootSARATH KRISHNAKUMARNoch keine Bewertungen
- International ®: The Materials Information CompanyDokument1 SeiteInternational ®: The Materials Information CompanySARATH KRISHNAKUMAR0% (1)
- Piping Materials GuideDokument2 SeitenPiping Materials GuideSARATH KRISHNAKUMARNoch keine Bewertungen
- List of MSS StandardsDokument3 SeitenList of MSS StandardsSARATH KRISHNAKUMARNoch keine Bewertungen
- AWS AWA StandardsDokument2 SeitenAWS AWA StandardsSARATH KRISHNAKUMARNoch keine Bewertungen
- Metals, Test Methods and Analytical ProceduresDokument1 SeiteMetals, Test Methods and Analytical ProceduresSARATH KRISHNAKUMARNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- International ®: The Materials Information CompanyDokument1 SeiteInternational ®: The Materials Information CompanySARATH KRISHNAKUMARNoch keine Bewertungen
- Weld Strength Reduction Factor W PDFDokument1 SeiteWeld Strength Reduction Factor W PDFSARATH KRISHNAKUMARNoch keine Bewertungen
- Weld Strength Reduction Factor W PDFDokument1 SeiteWeld Strength Reduction Factor W PDFSARATH KRISHNAKUMARNoch keine Bewertungen
- Piping Design B31.3Dokument1 SeitePiping Design B31.3SARATH KRISHNAKUMARNoch keine Bewertungen
- Match & Index FunctionsDokument2 SeitenMatch & Index FunctionsSARATH KRISHNAKUMARNoch keine Bewertungen
- Anderson Greenwood - Pentair Series 400 Modulating Datasheet PDFDokument4 SeitenAnderson Greenwood - Pentair Series 400 Modulating Datasheet PDFSARATH KRISHNAKUMARNoch keine Bewertungen
- Match FunctionDokument5 SeitenMatch FunctionSARATH KRISHNAKUMARNoch keine Bewertungen
- 1993 Manual de Taller Explorer, Aerostar, RangerDokument74 Seiten1993 Manual de Taller Explorer, Aerostar, RangerOscar CruzNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- B Indice F400 EDokument8 SeitenB Indice F400 EIslam ShoukryNoch keine Bewertungen
- Mahindra TractorsDokument24 SeitenMahindra Tractorssukhwinder17021984Noch keine Bewertungen
- Hangcha - QSD20 25 Catalogo de Partes - 2014.1Dokument132 SeitenHangcha - QSD20 25 Catalogo de Partes - 2014.1Ladislau CardosoNoch keine Bewertungen
- Mahindra Tractors Overview OptDokument12 SeitenMahindra Tractors Overview OptdipankarNoch keine Bewertungen
- Alley DockingDokument4 SeitenAlley Dockingbra9tee9tiniNoch keine Bewertungen
- Wheel AlignmentDokument7 SeitenWheel AlignmentJOIJODENoch keine Bewertungen
- Dau Keo EST - Engine ISG (English)Dokument2.946 SeitenDau Keo EST - Engine ISG (English)Vũ Công Minh100% (2)
- DS5 Brochure PDFDokument41 SeitenDS5 Brochure PDFIvan RafailovicNoch keine Bewertungen
- Hs 589Dokument4 SeitenHs 589bookisealaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Door lock control system overviewDokument4 SeitenDoor lock control system overviewhamayunNoch keine Bewertungen
- 2023 Design BriefingDokument24 Seiten2023 Design Briefingpatcharamai.chNoch keine Bewertungen
- Forklift ModelDokument2 SeitenForklift ModelShoaib MahmudNoch keine Bewertungen
- Almera Owner Manual EN PDFDokument228 SeitenAlmera Owner Manual EN PDFjonathanNoch keine Bewertungen
- Toyota L 2l 2l T Engine Workshop Service Repair ManualDokument228 SeitenToyota L 2l 2l T Engine Workshop Service Repair ManualHaji Rashid100% (1)
- Toyota/Lexus Reprogramming Matrix 10/23/2007: Mark/Model Year Range System System Description/NameDokument2 SeitenToyota/Lexus Reprogramming Matrix 10/23/2007: Mark/Model Year Range System System Description/NameEdgar Oswaldo Hinojosa MayoralNoch keine Bewertungen
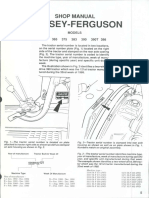
- Massey Ferguson MF362 MF365Dokument194 SeitenMassey Ferguson MF362 MF365SANTI - MECANICANoch keine Bewertungen
- 31TH 2001Dokument47 Seiten31TH 2001Michael FodorNoch keine Bewertungen
- Buscar Filtro - Wix FiltersDokument1 SeiteBuscar Filtro - Wix FiltersRodolfo PerezNoch keine Bewertungen
- Ratan Tata's vision for affordable transportationDokument4 SeitenRatan Tata's vision for affordable transportationUtsav KunduNoch keine Bewertungen
- Aerodynamic drag coefficient guide for cars under 40 charactersDokument12 SeitenAerodynamic drag coefficient guide for cars under 40 characterssrmhss100% (1)
- Listado Partes Direccion y SuspensionDokument102 SeitenListado Partes Direccion y Suspensionpedro millanNoch keine Bewertungen
- RR TV41 Cullinan 20200418Dokument6 SeitenRR TV41 Cullinan 20200418Eric KovalskyNoch keine Bewertungen
- Plant Storage Location Material ListDokument6 SeitenPlant Storage Location Material ListNik Muhammad FaridNoch keine Bewertungen
- Training Material DANA CalibrationDokument5 SeitenTraining Material DANA CalibrationFauan S100% (1)
- The BMW Z4 M RoadsterDokument6 SeitenThe BMW Z4 M RoadsterJorgeNoch keine Bewertungen
- ZF AS Tronic ManualDokument51 SeitenZF AS Tronic ManualBienvenu Massouangui100% (6)
- New Products from Other ManufacturersDokument14 SeitenNew Products from Other ManufacturersВалерий ГерасимовNoch keine Bewertungen
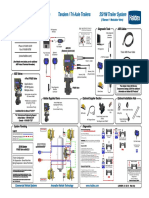
- PLC Select System 2S/1M Trailer System Tandem / Tri-Axle TrailersDokument1 SeitePLC Select System 2S/1M Trailer System Tandem / Tri-Axle TrailersDimaNoch keine Bewertungen
- 3126E Engine: ECM Wire DiagramDokument11 Seiten3126E Engine: ECM Wire DiagramPhil B.100% (1)