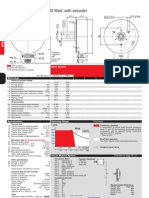
EC 22 Æ22 mm, brushless, 50 Watt
A with hall sensors B sensorless
maxon EC motor
Connector:
MKF 13268-6-0-808
Stocko Elektronik GmbH
M 1:1
Stock program
Standard program Order Number
Special program (on request)
A with Hall sensors 167130 167129
B sensorless 201049 201048
Motor Data
Values at nominal voltage
1 Nominal voltage V 32.0 32.0
2 No load speed rpm 38700 22400
3 No load current mA 327 128
4 Nominal speed rpm 36600 20200
5 Nominal torque (max. continuous torque) mNm 30.6 37.2
6 Nominal current (max. continuous current) A 4.16 2.82
7 Stall torque mNm 692 437
8 Starting current A 88.2 32.1
9 Max. efficiency % 88 88
Characteristics
10 Terminal resistance phase to phase W 0.363 0.997
11 Terminal inductance phase to phase mH 0.0490 0.147
12 Torque constant mNm / A 7.85 13.6
13 Speed constant rpm / V 1220 702
14 Speed / torque gradient rpm / mNm 56.2 51.4
15 Mechanical time constant ms 2.47 2.26
16 Rotor inertia gcm2 4.20 4.20
Specifications Operating Range Comments
Thermal data n [rpm]
17 Thermal resistance housing-ambient 7.0 K / W Continuous operation
18 Thermal resistance winding-housing 1.0 K / W In observation of above listed thermal resistance
19 Thermal time constant winding 5.06 s (lines 17 and 18) the maximum permissible winding
temperature will be reached during continuous
20 Thermal time constant motor 355 s
operation at 25°C ambient.
21 Ambient temperature -20 ... +100°C
= Thermal limit.
22 Max. permissible winding temperature +125°C
Mechanical data (preloaded ball bearings) Short term operation
23 Max. permissible speed1) 50000 rpm The motor may be briefly overloaded (recurring).
24 Axial play at axial load < 5 N 0 mm
>5N max. 0.14 mm
25 Radial play preloaded Assigned power rating
26 Max. axial load (dynamic) 4N
27 Max. force for press fits (static) 60 N
(static, shaft supported) 250 N
28 Max. radial loading, 5 mm from flange 16 N
1) in combination with encoder MR nmax = 37500 rpm
maxon Modular System Overview on page 16 - 21
Other specifications Planetary Gearhead for type A:
29 Number of pole pairs 1 Æ22 mm Encoder MR
30 Number of phases 3 0.5 - 3.4 Nm 128 / 256 / 512 CPT
31 Weight of motor 130 g Page 226 / 227 Page 263
Spindle Drive
Values listed in the table are nominal. Æ22 mm for type B:
Connection A Page 249 / 250 Resolver
brown Motor winding 1 Pin 1 on request
red Motor winding 2 Pin 2
orange Motor winding 3 Pin 3
yellow VHall 4.5 ... 24 VDC Pin 4
green GND Pin 5 Recommended Electronics:
blue Hall sensor 1* Pin 6 DECS 50/5 Page 288
violet Hall sensor 2* Pin 7 DEC 24/3, DEC 50/5 289
grey Hall sensor 3* Pin 8 DECV 50/5 295
*Internal pull-up (7 … 13 kW) on pin 4 DES 50/5 296
Connection B (Cable AWG 24) EPOS 24/1 302
brown Motor winding 1 EPOS2 Module 36/2 302
red Motor winding 2 EPOS 24/5 303
EPOS2 50/5 303
orange Motor winding 3 Sold & Serviced By:
EPOS P 24/5 306
Wiring diagram for Hall sensors see page 27 ELECTROMATE
INDUSTRIAL SALES LIMITED Notes 20
PRECISION TECHNOLOGY & QUALITY
152 Toll Free Phone (877) SERVO98 May 2009 edition / subject to change
Toll Free Fax (877) SERVO99
sales@electromate.com
www.electromate.com
Das könnte Ihnen auch gefallen
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsVon EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Electrical and Electronic Principles: Volume 2Von EverandElectrical and Electronic Principles: Volume 2Bewertung: 4 von 5 Sternen4/5 (5)
- Boq ElectricalDokument22 SeitenBoq Electricaleng_hosNoch keine Bewertungen
- Newnes Circuit Calculations Pocket Book: with Computer ProgramsVon EverandNewnes Circuit Calculations Pocket Book: with Computer ProgramsNoch keine Bewertungen
- 1047A Refractive Index Detector: Service HandbookDokument148 Seiten1047A Refractive Index Detector: Service HandbookbowcoastieNoch keine Bewertungen
- Erection Testing and CommissioningDokument30 SeitenErection Testing and CommissioningEngr Muhammad Abu BakrNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- Maintain Your Vibrating Roller MachineDokument96 SeitenMaintain Your Vibrating Roller MachineOggy ToffyNoch keine Bewertungen
- Titan 10k Schematic PDFDokument24 SeitenTitan 10k Schematic PDFTan Hung LuuNoch keine Bewertungen
- Analog Circuit Techniques: With Digital InterfacingVon EverandAnalog Circuit Techniques: With Digital InterfacingNoch keine Bewertungen
- 33KV & PTR (ABB) Relay SettingDokument16 Seiten33KV & PTR (ABB) Relay SettingJayam KondanNoch keine Bewertungen
- Digital Power Electronics and ApplicationsVon EverandDigital Power Electronics and ApplicationsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Voltages Induced in Sheaths and Armour of Single Core CablesDokument2 SeitenVoltages Induced in Sheaths and Armour of Single Core CablesHameedNoch keine Bewertungen
- EC 22 22 MM, Brushless, 50 Watt: Part NumbersDokument1 SeiteEC 22 22 MM, Brushless, 50 Watt: Part NumbersfurkanfurkanfurkanNoch keine Bewertungen
- Maxon EC-Powermax30 200wattDokument1 SeiteMaxon EC-Powermax30 200wattElectromateNoch keine Bewertungen
- Maxon EC22 50watt SterilisableDokument1 SeiteMaxon EC22 50watt SterilisableElectromateNoch keine Bewertungen
- Maxon EC90 Flat 90watt With EncoderDokument1 SeiteMaxon EC90 Flat 90watt With EncoderElectromateNoch keine Bewertungen
- Maxon EC6 1.2wattDokument1 SeiteMaxon EC6 1.2wattElectromateNoch keine Bewertungen
- Maxon EC-Max40 70wattDokument1 SeiteMaxon EC-Max40 70wattElectromateNoch keine Bewertungen
- Maxon EC90 Flat 90wattDokument1 SeiteMaxon EC90 Flat 90wattElectromateNoch keine Bewertungen
- Maxon EC-Max16 5wattDokument1 SeiteMaxon EC-Max16 5wattElectromateNoch keine Bewertungen
- EC 20 MOTOR SPECSDokument1 SeiteEC 20 MOTOR SPECSivanlawms6745Noch keine Bewertungen
- Maxon EC20 Flat 5wattDokument1 SeiteMaxon EC20 Flat 5wattElectromateNoch keine Bewertungen
- Maxon EC-Max22 25wattDokument1 SeiteMaxon EC-Max22 25wattElectromateNoch keine Bewertungen
- Motor Maxon 323772Dokument1 SeiteMotor Maxon 323772Henry Daniel VerdugoNoch keine Bewertungen
- 12 156 enDokument1 Seite12 156 enLuka MadridNoch keine Bewertungen
- Maxon EC22 20watt Integrated ElectronicsDokument2 SeitenMaxon EC22 20watt Integrated ElectronicsElectromateNoch keine Bewertungen
- En 21 250Dokument1 SeiteEn 21 250compimagmaticNoch keine Bewertungen
- Maxon EC60 400wattDokument1 SeiteMaxon EC60 400wattElectromateNoch keine Bewertungen
- 12 149 enDokument1 Seite12 149 enLuka MadridNoch keine Bewertungen
- Maxon EC-Max30 40wattDokument1 SeiteMaxon EC-Max30 40wattElectromateNoch keine Bewertungen
- En 21 251Dokument1 SeiteEn 21 251Froylan OchoaNoch keine Bewertungen
- Maxon Ec45 136210Dokument1 SeiteMaxon Ec45 136210compimagmaticNoch keine Bewertungen
- 90mm EC Brushless MotorDokument1 Seite90mm EC Brushless MotorLucas SuplinoNoch keine Bewertungen
- Maxon EC45 Flat 30wattDokument1 SeiteMaxon EC45 Flat 30wattElectromateNoch keine Bewertungen
- Maxon RE30 Graphite Brushes 60wattDokument1 SeiteMaxon RE30 Graphite Brushes 60wattElectromateNoch keine Bewertungen
- Maxon EC20 Flat 3wattDokument1 SeiteMaxon EC20 Flat 3wattElectromateNoch keine Bewertungen
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDokument1 SeiteEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanNoch keine Bewertungen
- RE 50 50mm Graphite Brushes 200W MotorDokument1 SeiteRE 50 50mm Graphite Brushes 200W MotorJorge Alejandro Barrutia BorbollaNoch keine Bewertungen
- RE50Dokument1 SeiteRE50Yhony Gamarra VargasNoch keine Bewertungen
- F2140 Eng DatasheetDokument4 SeitenF2140 Eng Datasheettngyew leeNoch keine Bewertungen
- EC 90 Flat: 90 MM, Brushless, 600 WattDokument1 SeiteEC 90 Flat: 90 MM, Brushless, 600 WattDiy DoeNoch keine Bewertungen
- Maxon RE65 Graphite Brushes 250wattDokument1 SeiteMaxon RE65 Graphite Brushes 250wattElectromateNoch keine Bewertungen
- Motor 30 WattDokument1 SeiteMotor 30 WattPRED4T0R85Noch keine Bewertungen
- Maxon Re40 DC Motor 148866 Datasheet PDFDokument1 SeiteMaxon Re40 DC Motor 148866 Datasheet PDFtoony reyesNoch keine Bewertungen
- Motores Maxon 2017Dokument1 SeiteMotores Maxon 2017--Noch keine Bewertungen
- 17 en 170 Lstage DatasheetDokument1 Seite17 en 170 Lstage DatasheetSana SyedNoch keine Bewertungen
- MAXON Brushed Motor A-Max 26, 4.5 WDokument1 SeiteMAXON Brushed Motor A-Max 26, 4.5 WRadu BabauNoch keine Bewertungen
- Maxon Re40Dokument1 SeiteMaxon Re40compimagmaticNoch keine Bewertungen
- Maxon RE25 Precious Metal Brushes 10wattDokument1 SeiteMaxon RE25 Precious Metal Brushes 10wattElectromateNoch keine Bewertungen
- EC 60mm 400W Brushless MotorDokument1 SeiteEC 60mm 400W Brushless MotorZoltán SoósNoch keine Bewertungen
- Maxon RE-Max17 Graphite Brushes 4.5wattDokument2 SeitenMaxon RE-Max17 Graphite Brushes 4.5wattElectromateNoch keine Bewertungen
- Maxon RE40 Graphite Brushes 150wattDokument1 SeiteMaxon RE40 Graphite Brushes 150wattElectromateNoch keine Bewertungen
- 12 171 enDokument1 Seite12 171 enLuka MadridNoch keine Bewertungen
- EC-max 30 ∅30 mm, brushless, 60 Watt motor specsDokument1 SeiteEC-max 30 ∅30 mm, brushless, 60 Watt motor specsfurkanfurkanfurkanNoch keine Bewertungen
- Maxon EC45 4 Pole 300wattDokument1 SeiteMaxon EC45 4 Pole 300wattElectromateNoch keine Bewertungen
- 16 275 enDokument1 Seite16 275 enmawadNoch keine Bewertungen
- Maxon RE50 Graphite Brushes 200wattDokument1 SeiteMaxon RE50 Graphite Brushes 200wattElectromateNoch keine Bewertungen
- Graphite Brushes, 60 Watt Maxon DC MotorDokument1 SeiteGraphite Brushes, 60 Watt Maxon DC MotorRatanieriNoch keine Bewertungen
- Galil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesDokument1 SeiteGalil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesElectromateNoch keine Bewertungen
- Introducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionDokument1 SeiteIntroducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionElectromateNoch keine Bewertungen
- Electromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseDokument1 SeiteElectromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseElectromateNoch keine Bewertungen
- Electromate Elated With Win at The 2022 Business Achievement AwardsDokument2 SeitenElectromate Elated With Win at The 2022 Business Achievement AwardsElectromateNoch keine Bewertungen
- Electromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaDokument1 SeiteElectromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaElectromateNoch keine Bewertungen
- New LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsDokument1 SeiteNew LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsElectromateNoch keine Bewertungen
- Kollmorgen Debuts EKM Series Servo MotorsDokument1 SeiteKollmorgen Debuts EKM Series Servo MotorsElectromateNoch keine Bewertungen
- Exor X5 Wireless Press ReleaseDokument1 SeiteExor X5 Wireless Press ReleaseElectromateNoch keine Bewertungen
- Mecademic Robotics Releases New Firmware For Its Meca500 RobotDokument2 SeitenMecademic Robotics Releases New Firmware For Its Meca500 RobotElectromateNoch keine Bewertungen
- Electromate Recertified As A Great Place To Work' Press ReleaseDokument1 SeiteElectromate Recertified As A Great Place To Work' Press ReleaseElectromateNoch keine Bewertungen
- AMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMDokument2 SeitenAMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMElectromateNoch keine Bewertungen
- New 100 Amps Peak FlexPro Servo Drives Available From AMCDokument1 SeiteNew 100 Amps Peak FlexPro Servo Drives Available From AMCElectromateNoch keine Bewertungen
- Electromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesDokument2 SeitenElectromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesElectromateNoch keine Bewertungen
- New High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesDokument2 SeitenNew High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesElectromateNoch keine Bewertungen
- ADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesDokument2 SeitenADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesElectromateNoch keine Bewertungen
- Meet The World's Most Precise Six-Axis RobotDokument1 SeiteMeet The World's Most Precise Six-Axis RobotElectromateNoch keine Bewertungen
- Electromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardDokument2 SeitenElectromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardElectromateNoch keine Bewertungen
- POSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsDokument1 SeitePOSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsElectromateNoch keine Bewertungen
- New Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseDokument1 SeiteNew Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseElectromateNoch keine Bewertungen
- Electromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseDokument2 SeitenElectromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseElectromateNoch keine Bewertungen
- New LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsDokument1 SeiteNew LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsElectromateNoch keine Bewertungen
- Excellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesDokument2 SeitenExcellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesElectromateNoch keine Bewertungen
- New Integrated Spindle Drives Available From JVLDokument1 SeiteNew Integrated Spindle Drives Available From JVLElectromateNoch keine Bewertungen
- Electromate Extends Its Product Portfolio To Include Robots From MecademicDokument1 SeiteElectromate Extends Its Product Portfolio To Include Robots From MecademicElectromateNoch keine Bewertungen
- Electromate Recognized With 2021 AHTD Foundation AwardDokument1 SeiteElectromate Recognized With 2021 AHTD Foundation AwardElectromateNoch keine Bewertungen
- Netzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsDokument1 SeiteNetzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsElectromateNoch keine Bewertungen
- Electromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020Dokument2 SeitenElectromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020ElectromateNoch keine Bewertungen
- Maxon's New IDX Integrated Motor - Power at The Press of A ButtonDokument1 SeiteMaxon's New IDX Integrated Motor - Power at The Press of A ButtonElectromateNoch keine Bewertungen
- Electromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsDokument2 SeitenElectromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsElectromateNoch keine Bewertungen
- ADVANCED Motion Controls Releases The FM060-25-CMDokument1 SeiteADVANCED Motion Controls Releases The FM060-25-CMElectromateNoch keine Bewertungen
- CMOS DC & Transient ResponseDokument40 SeitenCMOS DC & Transient Responsesadia santaNoch keine Bewertungen
- Teorie PROTECTIIDokument177 SeitenTeorie PROTECTIIbdsrlNoch keine Bewertungen
- ATI 390 User Manual Completed Version - 20180410Dokument128 SeitenATI 390 User Manual Completed Version - 20180410williamppNoch keine Bewertungen
- 3-Asynchronous ServomotorsDokument30 Seiten3-Asynchronous ServomotorschochoroyNoch keine Bewertungen
- Basic Electrical SafetyDokument25 SeitenBasic Electrical Safetyperezes100% (1)
- Star Delta StarterDokument11 SeitenStar Delta Starterasus zenfone5Noch keine Bewertungen
- Mobile Rect 110,48 - 100aDokument2 SeitenMobile Rect 110,48 - 100aKatsukiDaitoNoch keine Bewertungen
- Presented By-T.Mahendra Reddy Ankur Sahoo Shubham VarmaDokument30 SeitenPresented By-T.Mahendra Reddy Ankur Sahoo Shubham VarmaShubham VermaNoch keine Bewertungen
- Connection Cable: VDOGH050VAS0005E05STGH050VASDokument3 SeitenConnection Cable: VDOGH050VAS0005E05STGH050VASBishoo ShenoudaNoch keine Bewertungen
- HE IgniterDokument17 SeitenHE IgniterSahil MishraNoch keine Bewertungen
- NRLT Curriculum CrosswalkDokument12 SeitenNRLT Curriculum CrosswalkJulio SibrianNoch keine Bewertungen
- Chapter 1. Electronic Components & SignalsDokument12 SeitenChapter 1. Electronic Components & SignalsPavankumar Gosavi100% (2)
- Symplified Wiring System Book Guide A Profound Guide To Designing, Wiring and Installation (KUNTZ PH.D, ARNOLD)Dokument48 SeitenSymplified Wiring System Book Guide A Profound Guide To Designing, Wiring and Installation (KUNTZ PH.D, ARNOLD)carlosNoch keine Bewertungen
- Schaltplan GP 320 Interlock Panel +ISDokument74 SeitenSchaltplan GP 320 Interlock Panel +ISJose Luis Lopez100% (1)
- Basics of Intrinsically Safe and Non - Intrinsically Safe SystemsDokument8 SeitenBasics of Intrinsically Safe and Non - Intrinsically Safe Systemsnivprash8811Noch keine Bewertungen
- Gamo Wankam Daniel Coltech UBA18P0174: Good Answer 1mark, Wrong Answer - 1marks, No Answer No MarksDokument2 SeitenGamo Wankam Daniel Coltech UBA18P0174: Good Answer 1mark, Wrong Answer - 1marks, No Answer No MarksDanny JrNoch keine Bewertungen
- ABB State of The Art Switchgear PDFDokument7 SeitenABB State of The Art Switchgear PDFrimce77Noch keine Bewertungen
- Experiment 3Dokument10 SeitenExperiment 3Yogeswaran SundarrajNoch keine Bewertungen
- File3 PDFDokument119 SeitenFile3 PDFikkemijnnaam0% (1)
- Sony KV 29ls60e Part2Dokument47 SeitenSony KV 29ls60e Part2Kostas AthanasiadisNoch keine Bewertungen
- An 9742Dokument12 SeitenAn 9742EmersonMagnoMoraesNoch keine Bewertungen
- CH 4Dokument28 SeitenCH 4Nasser AlmofariNoch keine Bewertungen
- DC Motors Modified NewDokument19 SeitenDC Motors Modified NewsatyaNoch keine Bewertungen