Das könnte Ihnen auch gefallen
- Div Class Title A Variational Theory of Lift DivDokument21 SeitenDiv Class Title A Variational Theory of Lift DivematlisNoch keine Bewertungen
- Chinu - 2008121339735.04PARA FLEX 410Dokument4 SeitenChinu - 2008121339735.04PARA FLEX 410klashincoviskyNoch keine Bewertungen
- Hi-Scan Pro - PPTDokument26 SeitenHi-Scan Pro - PPTklashincoviskyNoch keine Bewertungen
- Waukesha 2013 EZ Book PDFDokument88 SeitenWaukesha 2013 EZ Book PDFklashincoviskyNoch keine Bewertungen
- Vibration Stethoscope - SKF Electronic Stethoscope TMST 3Dokument2 SeitenVibration Stethoscope - SKF Electronic Stethoscope TMST 3klashincoviskyNoch keine Bewertungen
- Airplane Design Vol 1-7, ErrataDokument15 SeitenAirplane Design Vol 1-7, ErratakamalfliezNoch keine Bewertungen
- Product Sheet - TDI T30Dokument2 SeitenProduct Sheet - TDI T30klashincoviskyNoch keine Bewertungen
- AVO Englisch 19-02-13Dokument5 SeitenAVO Englisch 19-02-13klashincoviskyNoch keine Bewertungen
- Otto CycleDokument7 SeitenOtto CycleklashincoviskyNoch keine Bewertungen
- Sensores RTD WatlowDokument576 SeitenSensores RTD Watlowjpineda55Noch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Millwright - What Is MillwrightDokument2 SeitenMillwright - What Is MillwrightklashincoviskyNoch keine Bewertungen
- 3412C 725 kVA Prime LowBsfc EU 50Hz1 PDFDokument6 Seiten3412C 725 kVA Prime LowBsfc EU 50Hz1 PDFKhaleel KhanNoch keine Bewertungen
- Propane Pressure-Enthalpy DiagramDokument1 SeitePropane Pressure-Enthalpy DiagramARYAN_FATHONI_AMRINoch keine Bewertungen
- Back Flushing - Basic Pumping Standard Operating GuidelinesDokument8 SeitenBack Flushing - Basic Pumping Standard Operating GuidelinesklashincoviskyNoch keine Bewertungen
- Hydraulic CircuitsDokument13 SeitenHydraulic CircuitsklashincoviskyNoch keine Bewertungen
- PressorsDokument8 SeitenPressorsManoj MisraNoch keine Bewertungen
- Vibration Pencil - TV200-260 Vibration Pen Data SheetDokument1 SeiteVibration Pencil - TV200-260 Vibration Pen Data SheetklashincoviskyNoch keine Bewertungen
- SPGuide To CompositesDokument70 SeitenSPGuide To CompositesklashincoviskyNoch keine Bewertungen
- Epg Spec 725 KvaDokument7 SeitenEpg Spec 725 KvaНиколай Белый0% (1)
- 0pen First 6320Dokument2 Seiten0pen First 6320klashincoviskyNoch keine Bewertungen
- Turndown Ratio ExplainedDokument3 SeitenTurndown Ratio ExplainedklashincoviskyNoch keine Bewertungen
- BrochureDokument6 SeitenBrochureklashincoviskyNoch keine Bewertungen
- Hydraulic Circuits Design and AnalysisDokument19 SeitenHydraulic Circuits Design and AnalysisklashincoviskyNoch keine Bewertungen
- Usage of PonyprogDokument6 SeitenUsage of PonyprogklashincoviskyNoch keine Bewertungen
- Hydraulic Circuits Lab ReportDokument13 SeitenHydraulic Circuits Lab ReportklashincoviskyNoch keine Bewertungen
- SPGuide To CompositesDokument70 SeitenSPGuide To CompositesklashincoviskyNoch keine Bewertungen
- Energy Input LabelingDokument3 SeitenEnergy Input LabelingklashincoviskyNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Creative NonfictionDokument11 SeitenCreative NonfictionRubelyn CagapeNoch keine Bewertungen
- EM 385-1-1 Chapters 20-26Dokument179 SeitenEM 385-1-1 Chapters 20-26MusabNoch keine Bewertungen
- CrankDokument9 SeitenCrankKresna BayuNoch keine Bewertungen
- Danniel Martinez Gonzalez - Gizmo: Seasons: Earth, Moon and Sun Activity B Due 2.3 Deadline 3.1Dokument3 SeitenDanniel Martinez Gonzalez - Gizmo: Seasons: Earth, Moon and Sun Activity B Due 2.3 Deadline 3.1dannielNoch keine Bewertungen
- IMG - 0092 PSME Code 2012 90Dokument1 SeiteIMG - 0092 PSME Code 2012 90Bugoy2023Noch keine Bewertungen
- Heidegger On Destruction - Chung ChinDokument16 SeitenHeidegger On Destruction - Chung ChinAprilo DielovaNoch keine Bewertungen
- Rec2009 025 PDFDokument172 SeitenRec2009 025 PDFEkaStaVTVNoch keine Bewertungen
- 21734Dokument67 Seiten21734Jeef100% (4)
- GRT9165 Product GuideDokument23 SeitenGRT9165 Product GuideEslamAldenAbdoNoch keine Bewertungen
- Elcometer Wet-Film Gage 115 Spec SheetDokument2 SeitenElcometer Wet-Film Gage 115 Spec SheetMary CasillasNoch keine Bewertungen
- Exercise - 8.1 NewDokument24 SeitenExercise - 8.1 NewAkriti Sharma 757Noch keine Bewertungen
- Section 09 - Traction Electrification SystemDokument47 SeitenSection 09 - Traction Electrification SystemAbu Monsur Ali100% (1)
- Tivax STB-T12 Owners ManualDokument32 SeitenTivax STB-T12 Owners ManualJesseNoch keine Bewertungen
- TOPFLYtech Product - April 2023 - 4GDokument56 SeitenTOPFLYtech Product - April 2023 - 4GmosorioNoch keine Bewertungen
- AWWA Bacterial Regrowth in Distr Sys PDFDokument368 SeitenAWWA Bacterial Regrowth in Distr Sys PDFsaishankarlNoch keine Bewertungen
- Countable UncountableDokument4 SeitenCountable UncountablePaoLo Mena la TorreNoch keine Bewertungen
- Climate Change & Disaster Risk Management: Razon, Lovelyn Rivera, Meg Anne Sta. Ines, MaricrisDokument56 SeitenClimate Change & Disaster Risk Management: Razon, Lovelyn Rivera, Meg Anne Sta. Ines, MaricrisMeg Anne Legaspi RiveraNoch keine Bewertungen
- 06 Scaffold Erection and Dismantling (JHA-JSA)Dokument4 Seiten06 Scaffold Erection and Dismantling (JHA-JSA)AmanNoch keine Bewertungen
- CPE PRACTICE TEST 2 READINGDokument4 SeitenCPE PRACTICE TEST 2 READINGHong Anh0% (1)
- ADAMHAND8A4Dokument11 SeitenADAMHAND8A4Elker José Camargo100% (1)
- Reservoir Engineering Handbook Tarek Ahmed Solution ManualDokument36 SeitenReservoir Engineering Handbook Tarek Ahmed Solution ManualMohamad Hasen japerNoch keine Bewertungen
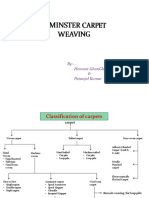
- Axminster CarpetDokument19 SeitenAxminster Carpetrohit sinhaNoch keine Bewertungen
- CHM4943 Wastewater TreatmentDokument7 SeitenCHM4943 Wastewater TreatmentUsman GhaniNoch keine Bewertungen
- The Effects of Oar-Shaft Stiffness andDokument9 SeitenThe Effects of Oar-Shaft Stiffness andValentina DiamanteNoch keine Bewertungen
- Auto IntroductionDokument90 SeitenAuto IntroductionShivanand ArwatNoch keine Bewertungen
- WozairDokument4 SeitenWozairRajakumar Bajji SubburamanNoch keine Bewertungen
- Minicap FTC260, FTC262: Technical InformationDokument20 SeitenMinicap FTC260, FTC262: Technical InformationAmanda PorterNoch keine Bewertungen
- June 2023 BillingDokument10 SeitenJune 2023 BillingEsther AkpanNoch keine Bewertungen
- Surface-Based Transport Model For Mixed-Size Sediment: Peter R. Wilcock, M.ASCE, and Joanna C. CroweDokument9 SeitenSurface-Based Transport Model For Mixed-Size Sediment: Peter R. Wilcock, M.ASCE, and Joanna C. CroweEdwinNoch keine Bewertungen
- Anotações - Seminários em Língua Inglesa - Discurso LiterárioDokument17 SeitenAnotações - Seminários em Língua Inglesa - Discurso LiterárioAline MoraisNoch keine Bewertungen