Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- HVAC Engineer Project Manager in Boston MA Resume Clifford BaumDokument3 SeitenHVAC Engineer Project Manager in Boston MA Resume Clifford BaumClifford BaumNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
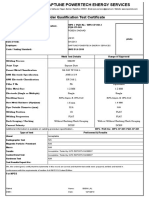
- Welder Qualification Test Certificate: Weld Test Details Range of ApprovalDokument1 SeiteWelder Qualification Test Certificate: Weld Test Details Range of ApprovalRamkunwar YadavNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Asme B16.5Dokument11 SeitenAsme B16.5jacquesmayol100% (1)
- Electrical Thumb Rules You MUST Follow-3Dokument3 SeitenElectrical Thumb Rules You MUST Follow-3shahadat08100% (1)
- Pressure Vessel Fabrication InspectionDokument82 SeitenPressure Vessel Fabrication InspectionHrishikesan100% (3)
- Abs - Ship Vibration - 2021Dokument87 SeitenAbs - Ship Vibration - 2021Jonathan BrasilNoch keine Bewertungen
- ENGEL Victory enDokument17 SeitenENGEL Victory enValentinIvascuNoch keine Bewertungen
- Open Transition and Closed Transition Star Delta Wye Delta Starters For Induction MotorsDokument30 SeitenOpen Transition and Closed Transition Star Delta Wye Delta Starters For Induction Motorsshahadat08Noch keine Bewertungen
- 5R55W (Ranger / Explorer) & 5R55S: 5 SPEED 4WD WITH LOCK UP (Full Electronic Control)Dokument4 Seiten5R55W (Ranger / Explorer) & 5R55S: 5 SPEED 4WD WITH LOCK UP (Full Electronic Control)Krzysztof Kjb100% (1)
- SHC 302 FinalDokument285 SeitenSHC 302 FinalAmr HassanNoch keine Bewertungen
- How To Calculate HT XLPE CABLE For 11 KV 433 V 1500 Kva Oil Type TransDokument5 SeitenHow To Calculate HT XLPE CABLE For 11 KV 433 V 1500 Kva Oil Type Transshahadat08Noch keine Bewertungen
- Manual de Partes Perforadoras MD6240Dokument589 SeitenManual de Partes Perforadoras MD6240fergusxxx100% (1)
- Electric Generator SymbolsDokument4 SeitenElectric Generator Symbolsshahadat080% (1)
- RFI - Request For InformationDokument22 SeitenRFI - Request For Informationshahadat08Noch keine Bewertungen
- Types of Diodes and Their Applications 24 Types of DiodesDokument16 SeitenTypes of Diodes and Their Applications 24 Types of Diodesshahadat08Noch keine Bewertungen
- Electric Power Substations Engineering Book ReviewDokument3 SeitenElectric Power Substations Engineering Book Reviewshahadat08Noch keine Bewertungen
- Monthly Prithibi 6Dokument7 SeitenMonthly Prithibi 6shahadat08Noch keine Bewertungen
- T Uk - Co.uk Timers and CountersDokument2 SeitenT Uk - Co.uk Timers and Countersshahadat08Noch keine Bewertungen
- Techsense Banladesh LTD: Photoelectric Sensor, Code: PTF-DM3DNODokument1 SeiteTechsense Banladesh LTD: Photoelectric Sensor, Code: PTF-DM3DNOshahadat08Noch keine Bewertungen
- Bearing Numbers ExplainedDokument3 SeitenBearing Numbers Explainedshahadat08Noch keine Bewertungen
- How To Calculate Sizing of Vacuum Circuit BreakerDokument5 SeitenHow To Calculate Sizing of Vacuum Circuit Breakershahadat08Noch keine Bewertungen
- VCB and LBSDokument2 SeitenVCB and LBSshahadat08100% (1)
- Present: Future (New Equipment/Installation)Dokument1 SeitePresent: Future (New Equipment/Installation)shahadat08Noch keine Bewertungen
- Exam Question Dhaka Wasa Vanue:BUET Date:14-11-2014 Time:1.5 HRDokument1 SeiteExam Question Dhaka Wasa Vanue:BUET Date:14-11-2014 Time:1.5 HRshahadat08Noch keine Bewertungen
- Nasiruddin Al Tusi BiographyDokument3 SeitenNasiruddin Al Tusi Biographyshahadat08Noch keine Bewertungen
- How To Identify Bearings by Bearing NumberDokument4 SeitenHow To Identify Bearings by Bearing Numbershahadat08100% (1)
- Dini Proshnottor by Abdul Hamid FaidiDokument254 SeitenDini Proshnottor by Abdul Hamid Faidishahadat08Noch keine Bewertungen
- Biye by Rehnuma Binte Anis (Low)Dokument87 SeitenBiye by Rehnuma Binte Anis (Low)shahadat08Noch keine Bewertungen
- Explosion Proof LightingDokument11 SeitenExplosion Proof Lightingshahadat08Noch keine Bewertungen
- Syed Shamsul Haque 2012 6Dokument21 SeitenSyed Shamsul Haque 2012 6shahadat08Noch keine Bewertungen
- Probittir Onushoron by Nurul Islam PDFDokument50 SeitenProbittir Onushoron by Nurul Islam PDFshahadat08Noch keine Bewertungen
- ShaftDokument8 SeitenShaftshaafiqueNoch keine Bewertungen
- How To Fix Ender 3 S1 and S1 Pro ABL IssuesDokument5 SeitenHow To Fix Ender 3 S1 and S1 Pro ABL IssuesServicekamuiKamuiNoch keine Bewertungen
- Yonas Thesis Final .Docx2Dokument87 SeitenYonas Thesis Final .Docx2Noil Son100% (1)
- Toyota/Lexus: Boost Valve Kit 3 Oversized Lockup Control Valve Kit 1Dokument1 SeiteToyota/Lexus: Boost Valve Kit 3 Oversized Lockup Control Valve Kit 1Aays thNoch keine Bewertungen
- NFPA 25 Form AES 5.4 ITM Electric Fire Pump Annual 2013 - 2 of 7Dokument1 SeiteNFPA 25 Form AES 5.4 ITM Electric Fire Pump Annual 2013 - 2 of 7Mark Louie GuintoNoch keine Bewertungen
- BOQ Hotel CiputraDokument2 SeitenBOQ Hotel CiputraHendra AdriansyahNoch keine Bewertungen
- Campbell Hausfeld 70 Amp Stick WelderDokument36 SeitenCampbell Hausfeld 70 Amp Stick WelderJosé RamosNoch keine Bewertungen
- MS2V30 Hardware-3.4Dokument201 SeitenMS2V30 Hardware-3.4Wellington de SouzaNoch keine Bewertungen
- M1 Ques Slide 1 - 1Dokument4 SeitenM1 Ques Slide 1 - 1knizam1971Noch keine Bewertungen
- Hydroflo SelectionDokument1 SeiteHydroflo SelectionJosh SorensenNoch keine Bewertungen
- 08y PDFDokument306 Seiten08y PDFFilmorePainNoch keine Bewertungen
- Yamaha Nmax 155 - Safety Pre-Operation ChecksDokument1 SeiteYamaha Nmax 155 - Safety Pre-Operation Checksmotley crewzNoch keine Bewertungen
- R Series: Operation and Maintenance Manual Positive Displacement PumpDokument132 SeitenR Series: Operation and Maintenance Manual Positive Displacement PumpNathawatNoch keine Bewertungen
- Experiment No. 5: AIM: To Measure Fluid Flow by (A) ORIFICE METER and (B) V-NOTCHDokument5 SeitenExperiment No. 5: AIM: To Measure Fluid Flow by (A) ORIFICE METER and (B) V-NOTCHVipul SolankiNoch keine Bewertungen
- Gas Turbine and CC US Brochure Email VersionDokument16 SeitenGas Turbine and CC US Brochure Email Versiondanny buiNoch keine Bewertungen
- Module 9 - Wave Motion and SoundDokument27 SeitenModule 9 - Wave Motion and SoundHanah ArzNoch keine Bewertungen
- App 05 Drill Rig SpecDokument8 SeitenApp 05 Drill Rig SpecTibebu TayeNoch keine Bewertungen
- Reliablef 1 FR 56 FmwhitespksDokument4 SeitenReliablef 1 FR 56 FmwhitespksjajakaNoch keine Bewertungen
- hw10 Solution PDFDokument6 Seitenhw10 Solution PDFJason HuaNoch keine Bewertungen
- SINOPEC Industrial CatalogueDokument12 SeitenSINOPEC Industrial CatalogueSumaya Akter0% (1)
- 07-Eixo Dianteiro 2Dokument18 Seiten07-Eixo Dianteiro 2Renato AssisNoch keine Bewertungen