Das könnte Ihnen auch gefallen
- Concordia University Department of Electrical and Computer Engineering ELEC 6411 - Power Electronics I Course Outline Fall 2015 Course InstructorDokument30 SeitenConcordia University Department of Electrical and Computer Engineering ELEC 6411 - Power Electronics I Course Outline Fall 2015 Course InstructorAndrewJohnsonJenssonNoch keine Bewertungen
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Dokument4 SeitenHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- MD Singh Power Electronics Solution Manual To Chapter 15Dokument15 SeitenMD Singh Power Electronics Solution Manual To Chapter 15Anoop MathewNoch keine Bewertungen
- Prob Set 1Dokument2 SeitenProb Set 1Roshan meenaNoch keine Bewertungen
- Electric DrivesDokument2 SeitenElectric DrivesnikunjNoch keine Bewertungen
- Ee1451 LPDokument7 SeitenEe1451 LPGokulakrishnanNoch keine Bewertungen
- Economic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleDokument26 SeitenEconomic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleAdisuNoch keine Bewertungen
- Problems Chapter 5 1Dokument7 SeitenProblems Chapter 5 1Siva KumarNoch keine Bewertungen
- 01 - Introduction To Multilevel InvertersDokument53 Seiten01 - Introduction To Multilevel Invertersp09el860Noch keine Bewertungen
- Utilization of Electrical EnergyDokument17 SeitenUtilization of Electrical EnergyVARALAKSHMI SEERAPUNoch keine Bewertungen
- Solved Problems To Chapter 08Dokument6 SeitenSolved Problems To Chapter 08Rica Mikaela Cruz100% (1)
- Chapter 1 DC Drives Part1Dokument46 SeitenChapter 1 DC Drives Part1Mohammad MunzirNoch keine Bewertungen
- Control Systems PDFDokument133 SeitenControl Systems PDFShaboddinNoch keine Bewertungen
- Basic Motor ControlDokument17 SeitenBasic Motor ControlHeizen BulanNoch keine Bewertungen
- Tutorial Exercise On DC MachineDokument13 SeitenTutorial Exercise On DC MachineTSEGAAB NIGUSSENoch keine Bewertungen
- EEE 308 Practical Experiment No. 1 Matric Number......................... Speed Control On Single Phase Induction MotorDokument2 SeitenEEE 308 Practical Experiment No. 1 Matric Number......................... Speed Control On Single Phase Induction MotorOladeji Ifedayo RNoch keine Bewertungen
- Tutorial On Single Phase Induction MotorDokument1 SeiteTutorial On Single Phase Induction MotorHimanshu Saini0% (1)
- BL0683 6EJ517 Electronic Devices and SystemsDokument19 SeitenBL0683 6EJ517 Electronic Devices and Systemskhan aliNoch keine Bewertungen
- Single Phase Induction MotorDokument7 SeitenSingle Phase Induction MotorReeta Dutta100% (1)
- Design of A Driver IC IR2110 For MOSFETDokument21 SeitenDesign of A Driver IC IR2110 For MOSFETAyoub RajawiNoch keine Bewertungen
- Writing 3 AppendixDokument17 SeitenWriting 3 Appendixnguyenthanhphuongtrang0% (1)
- Electrostatic Field: Electromagnetic Fields & WavesDokument64 SeitenElectrostatic Field: Electromagnetic Fields & WavesTaha Al-abedNoch keine Bewertungen
- Electrical Machine and DrivesDokument18 SeitenElectrical Machine and DrivesNEERAJ27TRIPATHINoch keine Bewertungen
- EE4004A Power SystemsDokument4 SeitenEE4004A Power Systemsbenson215Noch keine Bewertungen
- DC-DC ConverterDokument24 SeitenDC-DC ConverterkandularanjithNoch keine Bewertungen
- Chapter Five: Ac-Ac Conversion: Ac Voltage ControllerDokument56 SeitenChapter Five: Ac-Ac Conversion: Ac Voltage Controllerfor lifeNoch keine Bewertungen
- Department of Electrical & Electronics Engg.: BEV Sem (Ex) Experiment No - 1 Aim: Apparatus RequiredDokument44 SeitenDepartment of Electrical & Electronics Engg.: BEV Sem (Ex) Experiment No - 1 Aim: Apparatus Requiredvkdkris75% (4)
- Assignment Unit 1Dokument2 SeitenAssignment Unit 1DHANUSH SHIVANANDNoch keine Bewertungen
- Chapter 3 SolutionsDokument6 SeitenChapter 3 SolutionsTinozivasheNoch keine Bewertungen
- WKU ECED Regular CurriculumDokument308 SeitenWKU ECED Regular Curriculumnegasa oliNoch keine Bewertungen
- Assignment 1Dokument2 SeitenAssignment 1Shabih100% (1)
- Reference Frame TheoryDokument42 SeitenReference Frame TheoryPravin Patel100% (1)
- Civil-V-Transportation Engineering-1 (10CV56) - SolutionDokument92 SeitenCivil-V-Transportation Engineering-1 (10CV56) - SolutionLokesh KNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- EE4532 Part A Lecture - pdf0Dokument83 SeitenEE4532 Part A Lecture - pdf0Denise Isebella LeeNoch keine Bewertungen
- Solid State Drives Short BookDokument48 SeitenSolid State Drives Short BookGomathi Raja MNoch keine Bewertungen
- Assignment 3Dokument2 SeitenAssignment 3champion2007Noch keine Bewertungen
- 2 Modeling of DC MachinesDokument23 Seiten2 Modeling of DC MachinessubhasishpodderNoch keine Bewertungen
- ECE 424 - Assign3Dokument2 SeitenECE 424 - Assign3Amos Atandi0% (1)
- 01 Three-Phase Diode Rectifiers AsmarDokument65 Seiten01 Three-Phase Diode Rectifiers AsmarVenkedesh RNoch keine Bewertungen
- Power System Operation and Control Question Bank PDFDokument26 SeitenPower System Operation and Control Question Bank PDFPushpaNoch keine Bewertungen
- Chap 7 Solutions PDFDokument34 SeitenChap 7 Solutions PDFIbrahim Hussain100% (1)
- Chapter OneDokument28 SeitenChapter Oneadisu100% (2)
- Review Questions For Electrical Machines and DrivesDokument14 SeitenReview Questions For Electrical Machines and DrivesClifford MkongNoch keine Bewertungen
- Chapter 3 - Single Phase InverterDokument20 SeitenChapter 3 - Single Phase InverterMuhammad Izz IzzuddinNoch keine Bewertungen
- CH2Dokument55 SeitenCH2Shantha KumarNoch keine Bewertungen
- Load Flow Matrices IIT Roorkee Notes NPTELDokument88 SeitenLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- DC Machine SimulationDokument12 SeitenDC Machine Simulationkiranch219Noch keine Bewertungen
- HW4 SolutionsDokument10 SeitenHW4 SolutionsBrooklyn Luqii100% (1)
- Bifpcl Question Solve - 2015: R 5+3+2 10 V 20+20 40 Sor 10 P 40 / (4 X 10)Dokument7 SeitenBifpcl Question Solve - 2015: R 5+3+2 10 V 20+20 40 Sor 10 P 40 / (4 X 10)Mazharul HaqueNoch keine Bewertungen
- 3 Line ConverterDokument10 Seiten3 Line ConverterJay Romar PabianiaNoch keine Bewertungen
- Three PhaseDokument29 SeitenThree PhaseBaquiran John Paul BaquiranNoch keine Bewertungen
- DC Machine Example ProblemsDokument4 SeitenDC Machine Example ProblemsFemi Prince0% (1)
- 1st Lec DC Circuits & Network TheormDokument88 Seiten1st Lec DC Circuits & Network Theormrktiwary256034Noch keine Bewertungen
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Von EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Noch keine Bewertungen
- R5410204-Power System Operation and ControlDokument4 SeitenR5410204-Power System Operation and ControlShakthi BoseNoch keine Bewertungen
- Power Control SystemDokument29 SeitenPower Control SystemJames XgunNoch keine Bewertungen
- 1792Dokument7 Seiten1792Mohd AliNoch keine Bewertungen
- PSOC SIMP TieDokument3 SeitenPSOC SIMP TieLol ChupNoch keine Bewertungen
- Mux 2700Dokument16 SeitenMux 2700obioji100% (1)
- Shonadanga Residential Area (Phase I) : Presented By: Presented To: Dilshad Afroz Khondaker Mohammed Mohiuddin EkramDokument22 SeitenShonadanga Residential Area (Phase I) : Presented By: Presented To: Dilshad Afroz Khondaker Mohammed Mohiuddin EkramNishat SaminNoch keine Bewertungen
- Community Project Report Women in Literature, Society & Culture-1Dokument35 SeitenCommunity Project Report Women in Literature, Society & Culture-1Saurav GuptaNoch keine Bewertungen
- Bharat Heavy Electricals Limited: Tvenkat@bheltry - Co.inDokument14 SeitenBharat Heavy Electricals Limited: Tvenkat@bheltry - Co.inGohilakrishnan ThiagarajanNoch keine Bewertungen
- HSE Risk AssessmentDokument4 SeitenHSE Risk AssessmentWasique NesarNoch keine Bewertungen
- CSI Specification Section Numbers and TitlesDokument186 SeitenCSI Specification Section Numbers and TitlesKatinskagomesNoch keine Bewertungen
- Ana Criselda B. Magnabihon - ResumeDokument2 SeitenAna Criselda B. Magnabihon - ResumearrenzmagnabihonNoch keine Bewertungen
- Section 33 - Fisher 2100 and 2100EDokument14 SeitenSection 33 - Fisher 2100 and 2100EhammamiNoch keine Bewertungen
- Day4a - Goals of Anthropology, Political Science, and SociologyDokument42 SeitenDay4a - Goals of Anthropology, Political Science, and SociologyFfrekgtreh Fygkohk100% (1)
- Problem Solving & Root Cause AnalysisDokument8 SeitenProblem Solving & Root Cause AnalysisPermanapurba100% (1)
- DBMS & SQL Assignment 1Dokument5 SeitenDBMS & SQL Assignment 1Madhuri PatelNoch keine Bewertungen
- Condensing Unit and Refrigeration System Installation & Operations ManualDokument43 SeitenCondensing Unit and Refrigeration System Installation & Operations ManualdarwinNoch keine Bewertungen
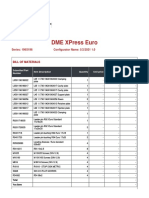
- Dme Xpress Euro: Series: 196X196 Configurator Name: 5/2/2021 1.0Dokument3 SeitenDme Xpress Euro: Series: 196X196 Configurator Name: 5/2/2021 1.0Ahmed SamirNoch keine Bewertungen
- Labor CasesDokument28 SeitenLabor CasesJuralexNoch keine Bewertungen
- C 162 Â " 99 - QZE2MI05OQDokument14 SeitenC 162 Â " 99 - QZE2MI05OQJesica QuentNoch keine Bewertungen
- PDFDokument9 SeitenPDFRanjitNoch keine Bewertungen
- Probability Practice - 6TDokument5 SeitenProbability Practice - 6Tnguyenduckien054Noch keine Bewertungen
- Eq Public PDFDokument15 SeitenEq Public PDFmoisesNoch keine Bewertungen
- Journal Homepage: - : Manuscript HistoryDokument13 SeitenJournal Homepage: - : Manuscript HistoryIJAR JOURNALNoch keine Bewertungen
- FPH-HP Install Manual V2.8Dokument38 SeitenFPH-HP Install Manual V2.8steve67% (3)
- Tutorial CMMIDokument256 SeitenTutorial CMMIsanthikumargNoch keine Bewertungen
- English 6 - EJE 2 - Week 4Dokument6 SeitenEnglish 6 - EJE 2 - Week 4nancy perezNoch keine Bewertungen
- 4-On The Nature of Markets and Their PracticesDokument26 Seiten4-On The Nature of Markets and Their PracticesRaco ZadiNoch keine Bewertungen
- Experiment 4 Voltage RegulatorDokument9 SeitenExperiment 4 Voltage RegulatorMahesh KambleNoch keine Bewertungen
- Determination of Settlement For Beam On Elastic Foundation by ETABS SoftwareDokument8 SeitenDetermination of Settlement For Beam On Elastic Foundation by ETABS SoftwareTabrez AhmedNoch keine Bewertungen
- Recuperation of Kinetic Energy - Regenerative BrakingDokument5 SeitenRecuperation of Kinetic Energy - Regenerative BrakingAbhishek KumarNoch keine Bewertungen
- Lesson Presentation Risk Identification: Prepared By: Jamaal T. Villapaña, MBADokument5 SeitenLesson Presentation Risk Identification: Prepared By: Jamaal T. Villapaña, MBAJolina PahayacNoch keine Bewertungen
- Siddaganga Institute Technology: Injection MouldingDokument12 SeitenSiddaganga Institute Technology: Injection MouldingPRAVEEN BOODAGOLINoch keine Bewertungen
- Javascript Lab Assignment 1: My First Javascript GameDokument3 SeitenJavascript Lab Assignment 1: My First Javascript GameShaveta KhepraNoch keine Bewertungen
- Synthetic Hi-Temp GreaseDokument1 SeiteSynthetic Hi-Temp GreasetariNoch keine Bewertungen