Das könnte Ihnen auch gefallen
- Differential and Multistage AmplifiersDokument85 SeitenDifferential and Multistage AmplifiersShino JosephNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- JalTestSoft Innovations List 12.2 EnglishDokument183 SeitenJalTestSoft Innovations List 12.2 EnglishChristopherNoch keine Bewertungen
- Doosan Operation Manual PJM05Dokument3 SeitenDoosan Operation Manual PJM05Nim100% (1)
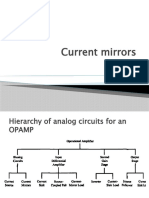
- Current MirrorsDokument76 SeitenCurrent MirrorsSHRIDHAR N100% (1)
- Unit 4 InvertersDokument86 SeitenUnit 4 InvertersHaritha RkNoch keine Bewertungen
- Sampling GatesDokument37 SeitenSampling GatesArun Kumar Dhupam67% (3)
- 354 33 Powerpoint-Slides CH9Dokument44 Seiten354 33 Powerpoint-Slides CH9Saravanan JayabalanNoch keine Bewertungen
- Diode and Its ApplicationsDokument39 SeitenDiode and Its ApplicationsUsama SidhuNoch keine Bewertungen
- Fuel CellDokument14 SeitenFuel CellJohnNeilBiberaNoch keine Bewertungen
- Plastic Caps Moulding Machine Production & MaintenanceDokument204 SeitenPlastic Caps Moulding Machine Production & MaintenancePeter Calvo90% (10)
- InstagramDokument23 SeitenInstagramSalman Ejaz100% (2)
- 18 FM Demodulators-Foster Seeley and Ratio DetectorDokument22 Seiten18 FM Demodulators-Foster Seeley and Ratio DetectorMohamed shabanaNoch keine Bewertungen
- Lecture 4 Differential AmplifiersDokument21 SeitenLecture 4 Differential Amplifierstranhieu_hcmutNoch keine Bewertungen
- Unit IIIDokument42 SeitenUnit IIIMd. Sadique SheikhNoch keine Bewertungen
- Electronic Instrumentation: Experiment 6 - Digital SwitchingDokument38 SeitenElectronic Instrumentation: Experiment 6 - Digital SwitchingEng-Mohammed KayedNoch keine Bewertungen
- EE101B: Common-Source AmplifierDokument48 SeitenEE101B: Common-Source AmplifierVijayalaxmi BiradarNoch keine Bewertungen
- Electronic Circuits - II Lab ManualDokument26 SeitenElectronic Circuits - II Lab Manualbalabasker100% (1)
- Analog Circuits K-NotesDokument42 SeitenAnalog Circuits K-NotesNitin TembhurnikarNoch keine Bewertungen
- Ecen 607 CMFB-2011Dokument44 SeitenEcen 607 CMFB-2011Girish K NathNoch keine Bewertungen
- TransistorsDokument51 SeitenTransistorsDr-Ahmed ElkoranyNoch keine Bewertungen
- Signal ProcessingDokument47 SeitenSignal ProcessingAthira rcNoch keine Bewertungen
- Advanced Current Mirrors and Opamps: Hossein ShamsiDokument45 SeitenAdvanced Current Mirrors and Opamps: Hossein ShamsiChristian Montano GalvezNoch keine Bewertungen
- Differential and Multistage Amplifiers: The Most Widely Used Circuit Building Block in Analog Integrated CircuitsDokument19 SeitenDifferential and Multistage Amplifiers: The Most Widely Used Circuit Building Block in Analog Integrated CircuitsRakeshSoniNoch keine Bewertungen
- Buck-Boost Converter - EET504 PDFDokument13 SeitenBuck-Boost Converter - EET504 PDFsiti izyan100% (1)
- Unit 5Dokument6 SeitenUnit 5Tarun SinghalNoch keine Bewertungen
- Waveform Shaping Circuit: - RC Circuit (High Pass CKT)Dokument33 SeitenWaveform Shaping Circuit: - RC Circuit (High Pass CKT)Samuel PakianathanNoch keine Bewertungen
- Introduction To MOS TechnologyDokument23 SeitenIntroduction To MOS TechnologyRaja VidyaNoch keine Bewertungen
- Ecd Lec-1-2Dokument37 SeitenEcd Lec-1-2assad abidNoch keine Bewertungen
- Unit 2Dokument37 SeitenUnit 2kishorghatage89Noch keine Bewertungen
- EIA4Dokument71 SeitenEIA4Vinay RaiNoch keine Bewertungen
- ppt-FETs & Other ComponentsDokument33 Seitenppt-FETs & Other Componentsramya hegdeNoch keine Bewertungen
- Digital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsDokument39 SeitenDigital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsAlem AklilNoch keine Bewertungen
- Lecture 8 - Multistage AmplifiersDokument43 SeitenLecture 8 - Multistage AmplifiersRanjan KarkiNoch keine Bewertungen
- Lect 07 Differential AmpDokument36 SeitenLect 07 Differential AmpRogerZhangNoch keine Bewertungen
- Cliping & Clamping of DiodesDokument19 SeitenCliping & Clamping of DiodesashutoshvashistNoch keine Bewertungen
- The CMOS Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Dokument27 SeitenThe CMOS Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Priyanka AshishNoch keine Bewertungen
- Electical and Electronics Engineering: Unit-I Power Semi Condctor Devices Iii-I B.Tech EeeDokument56 SeitenElectical and Electronics Engineering: Unit-I Power Semi Condctor Devices Iii-I B.Tech EeehimajatataNoch keine Bewertungen
- The Cmos Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Dokument40 SeitenThe Cmos Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Vidhya DsNoch keine Bewertungen
- The Cmos Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Dokument40 SeitenThe Cmos Inverter: Slides Adapted From: N. Weste, D. Harris, CMOS VLSI Design,, 3/e, 2004Vidhya DsNoch keine Bewertungen
- Devices and Circuits Ii: Lecture GoalsDokument6 SeitenDevices and Circuits Ii: Lecture GoalsMạnh Cường TrầnNoch keine Bewertungen
- ICA-UNIT-III - R19-CompleteDokument28 SeitenICA-UNIT-III - R19-CompleteBhanu Kiran BKNoch keine Bewertungen
- Lect 3Dokument42 SeitenLect 3Supriya Rakshit0% (1)
- Class22 and 23 Op Amp-May9-AnnotatedDokument47 SeitenClass22 and 23 Op Amp-May9-AnnotatedJagveer MeenaNoch keine Bewertungen
- Ece 321 Lecture RevDokument158 SeitenEce 321 Lecture RevPaolo TuazonNoch keine Bewertungen
- Analog Fault DerivationDokument89 SeitenAnalog Fault DerivationSachidananda SwarNoch keine Bewertungen
- Analog Signal Processing Using Operational Amplifiers: Ping GuoDokument43 SeitenAnalog Signal Processing Using Operational Amplifiers: Ping Guobec_lucarioNoch keine Bewertungen
- Chapter 2 - L1Dokument20 SeitenChapter 2 - L1Markos NiguseNoch keine Bewertungen
- Unit 3Dokument66 SeitenUnit 3Venky VellankiNoch keine Bewertungen
- Arjun PL Vlsi2Dokument73 SeitenArjun PL Vlsi2Tony StarkNoch keine Bewertungen
- MT 6215 Digital Electronic II.4Dokument14 SeitenMT 6215 Digital Electronic II.4jonathan stevenNoch keine Bewertungen
- Digital To Analog: R R D V 2R DDokument13 SeitenDigital To Analog: R R D V 2R DRudra MishraNoch keine Bewertungen
- Unit Iv Wave Shaping CircuitsDokument42 SeitenUnit Iv Wave Shaping Circuitsyuktha venkatesanNoch keine Bewertungen
- Unit 3Dokument59 SeitenUnit 3bhupendra1977Noch keine Bewertungen
- Chap16 1 NMOS InverterDokument50 SeitenChap16 1 NMOS Invertervlsijp100% (1)
- Chap16 2 CMOS Inverter ModifiedDokument14 SeitenChap16 2 CMOS Inverter ModifiedSai Kiran OrugantiNoch keine Bewertungen
- Multi Level Inverter: Dr. A. Ravi Professor/EEE Francis Xavier Engineering College Tirunelveli-IndiaDokument50 SeitenMulti Level Inverter: Dr. A. Ravi Professor/EEE Francis Xavier Engineering College Tirunelveli-IndiaRavi ANoch keine Bewertungen
- Diodes PhysicsDokument59 SeitenDiodes Physicsiam_wilberNoch keine Bewertungen
- 19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFDokument53 Seiten19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFKarthi&coNoch keine Bewertungen
- Page 1 of 8Dokument8 SeitenPage 1 of 8Sushma ReddyNoch keine Bewertungen
- The MPEG-7 Standard - A Brief Tutorial - : Ali Tabatabai Sony US Research Laboratories February 27, 2001Dokument32 SeitenThe MPEG-7 Standard - A Brief Tutorial - : Ali Tabatabai Sony US Research Laboratories February 27, 2001Sushma ReddyNoch keine Bewertungen
- Designing Intelligent Agent in Multilevel Game-Based Modules For E-Learning Computer Science CourseDokument26 SeitenDesigning Intelligent Agent in Multilevel Game-Based Modules For E-Learning Computer Science CourseSushma ReddyNoch keine Bewertungen
- Wireless Sensor Networks: Concepts and ComponentsDokument22 SeitenWireless Sensor Networks: Concepts and ComponentsSushma ReddyNoch keine Bewertungen
- AcknowledgementDokument12 SeitenAcknowledgementNeha Kanak100% (2)
- GV2ME32 TelemecaniqueDokument2 SeitenGV2ME32 TelemecaniqueRasek ResolfNoch keine Bewertungen
- Unit09.programmable Logic Devices EnglishDokument20 SeitenUnit09.programmable Logic Devices EnglishRufo LemurNoch keine Bewertungen
- MANUAL XTREME 24.06.08 Cornelius Maquina de HieloDokument60 SeitenMANUAL XTREME 24.06.08 Cornelius Maquina de HieloamadorNoch keine Bewertungen
- LorentzDokument7 SeitenLorentzvedakshi sapraNoch keine Bewertungen
- Part A (To Be Reffered by Students) : Designing of Control Panel of Domestic AppliancesDokument5 SeitenPart A (To Be Reffered by Students) : Designing of Control Panel of Domestic AppliancesSaket SinghNoch keine Bewertungen
- Lampi Infrarosu PDFDokument4 SeitenLampi Infrarosu PDFcezar_iasiNoch keine Bewertungen
- A Snap of Intimacy: Photo-Sharing Practices Among Young People On Social MediaDokument2 SeitenA Snap of Intimacy: Photo-Sharing Practices Among Young People On Social Medialyka cancinoNoch keine Bewertungen
- GDC31 DAC InternationalDokument72 SeitenGDC31 DAC InternationalSeção EletricaNoch keine Bewertungen
- Debugger CortexmDokument145 SeitenDebugger Cortexmcarver_uaNoch keine Bewertungen
- Flyer Sequetrol Compact Aqua enDokument2 SeitenFlyer Sequetrol Compact Aqua enEzequiel FavelukesNoch keine Bewertungen
- MS-MP01473 IT HandbookDokument30 SeitenMS-MP01473 IT HandbookJayJayNoch keine Bewertungen
- Sony TR-830 SchematicDokument1 SeiteSony TR-830 Schematicrftek100% (1)
- Demultiplexor 74HCT154Dokument8 SeitenDemultiplexor 74HCT154castellano_1983Noch keine Bewertungen
- Abstract of Price Quotation: Supplier ParticularsDokument2 SeitenAbstract of Price Quotation: Supplier ParticularsJaleann EspañolNoch keine Bewertungen
- Lecture Notes For Physics 229: Quantum Information and ComputationDokument321 SeitenLecture Notes For Physics 229: Quantum Information and ComputationIvan CheungNoch keine Bewertungen
- TR237 PDFDokument18 SeitenTR237 PDFint0Noch keine Bewertungen
- TPS A12 A12eDokument12 SeitenTPS A12 A12eJoserecon BonillaNoch keine Bewertungen
- WH627 Diagrama Elec.Dokument7 SeitenWH627 Diagrama Elec.iker56777Noch keine Bewertungen
- Brochure PRO LCD C Series NEW FORMATDokument4 SeitenBrochure PRO LCD C Series NEW FORMATJuan SanchezNoch keine Bewertungen
- Cathode Rays AnodeDokument43 SeitenCathode Rays Anodedevender singh100% (1)
- White Paper - Mineral Oils, White Oils and Engineered Synthetic Dielectric Fluids 20180426.1aDokument14 SeitenWhite Paper - Mineral Oils, White Oils and Engineered Synthetic Dielectric Fluids 20180426.1aDavid SundinNoch keine Bewertungen
- Loading, Ripping, and Playing Wii Game Backups From An External USB Hard Disk DriveDokument8 SeitenLoading, Ripping, and Playing Wii Game Backups From An External USB Hard Disk DriveBolivar DonatoNoch keine Bewertungen
- PC Hardware Servicing: Chapter 13: Managing CD DrivesDokument19 SeitenPC Hardware Servicing: Chapter 13: Managing CD DrivesAmir M. VillasNoch keine Bewertungen