Das könnte Ihnen auch gefallen
- CoreJava Ratan CompleteMarerial PDFDokument398 SeitenCoreJava Ratan CompleteMarerial PDFSivaShankar100% (7)
- Piping Handbook - Hydrocarbon Processing - 1968Dokument140 SeitenPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- ED ProcessDokument9 SeitenED ProcesskhanasifalamNoch keine Bewertungen
- Assignment ProblemsDokument10 SeitenAssignment ProblemsBalsam Qusay MohammedNoch keine Bewertungen
- Non Linear ProgrammingDokument109 SeitenNon Linear ProgramminginftraNoch keine Bewertungen
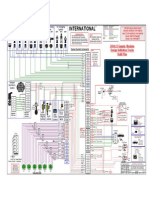
- Esquema Elétrico NGD 9.3Dokument2 SeitenEsquema Elétrico NGD 9.3LuisCarlosKovalchuk100% (1)
- BKLT DeaeratorDokument24 SeitenBKLT Deaeratormalikgaurav01Noch keine Bewertungen
- Diet Coke & Mentos Geyser Lab 2011-2012Dokument4 SeitenDiet Coke & Mentos Geyser Lab 2011-2012Frederick LoganNoch keine Bewertungen
- Algorithms For Constrained OptimizationDokument22 SeitenAlgorithms For Constrained OptimizationnmooseNoch keine Bewertungen
- Eramus Bridge PDFDokument10 SeitenEramus Bridge PDFBabaO.Riley100% (1)
- Edgar Osuna Robert Freund Federico Girosi Center For Biological and Computational Learning and Operations Research Center Massachusetts Institute of Technology Cambridge, MA, 02139, U.S.ADokument8 SeitenEdgar Osuna Robert Freund Federico Girosi Center For Biological and Computational Learning and Operations Research Center Massachusetts Institute of Technology Cambridge, MA, 02139, U.S.ARanaBilalShahidNoch keine Bewertungen
- Institute of Automation, University of Magdeburg, Germany E-Mail: Binh@infaut - Et.uni-Magdeburg - de E-Mail: Korn@infaut - Et.uni-Magdeburg - deDokument6 SeitenInstitute of Automation, University of Magdeburg, Germany E-Mail: Binh@infaut - Et.uni-Magdeburg - de E-Mail: Korn@infaut - Et.uni-Magdeburg - deetfshareNoch keine Bewertungen
- EVCO A 00024Dokument37 SeitenEVCO A 00024Freddy Garcia FuentesNoch keine Bewertungen
- RTR LagrangeMultipliersDokument56 SeitenRTR LagrangeMultipliersQarsam IlyasNoch keine Bewertungen
- Nonlinear Programming: Applicability Possible Types of Constraint Set Methods For Solving The Problem ExamplesDokument4 SeitenNonlinear Programming: Applicability Possible Types of Constraint Set Methods For Solving The Problem ExamplesLewis SitorusNoch keine Bewertungen
- Improved Versions of Learning Vector QuantizationDokument6 SeitenImproved Versions of Learning Vector QuantizationAshkan AbbasiNoch keine Bewertungen
- Chin Odilo Quantitative MethodesDokument10 SeitenChin Odilo Quantitative MethodesChin Odilo AsherinyuyNoch keine Bewertungen
- Modularity Maximization in Networks by Variable Neighborhood SearchDokument14 SeitenModularity Maximization in Networks by Variable Neighborhood SearchJohn ChoNoch keine Bewertungen
- The Multiobjective Multidimensional Knapsack Problem: A Survey and A New ApproachDokument24 SeitenThe Multiobjective Multidimensional Knapsack Problem: A Survey and A New ApproachVigneshwar NatesanNoch keine Bewertungen
- What Is Optimization?Dokument15 SeitenWhat Is Optimization?MHARLOU TORINGNoch keine Bewertungen
- Search Biases in Constrained Evolutionary Optimization: Thomas Philip Runarsson, Member, IEEE, and Xin Yao, Fellow, IEEEDokument12 SeitenSearch Biases in Constrained Evolutionary Optimization: Thomas Philip Runarsson, Member, IEEE, and Xin Yao, Fellow, IEEEAlex NegreaNoch keine Bewertungen
- Qualification Exam Question: 1 Statistical Models and MethodsDokument4 SeitenQualification Exam Question: 1 Statistical Models and MethodsAlmaliequeNoch keine Bewertungen
- Gecco2008 - OnctiDokument8 SeitenGecco2008 - OnctiGustavo SánchezNoch keine Bewertungen
- 2008 Infinite Kernel Learning Via Infinite AnDokument34 Seiten2008 Infinite Kernel Learning Via Infinite AnRiri LestariNoch keine Bewertungen
- I. Introduction To Convex OptimizationDokument12 SeitenI. Introduction To Convex OptimizationAZEENNoch keine Bewertungen
- SVM - Hype or HallelujahDokument13 SeitenSVM - Hype or HallelujahVaibhav JainNoch keine Bewertungen
- Monte Carlo Optimization Procedure For Chance Constrained Programming - Simulation Study ResultsDokument8 SeitenMonte Carlo Optimization Procedure For Chance Constrained Programming - Simulation Study ResultsFrederick PatacsilNoch keine Bewertungen
- Optimizacion (Ingles)Dokument133 SeitenOptimizacion (Ingles)Sergio PeñarandaNoch keine Bewertungen
- BookTeghem TL PDFDokument24 SeitenBookTeghem TL PDFAnNoch keine Bewertungen
- Ga WPDokument6 SeitenGa WPmohamed yehiaNoch keine Bewertungen
- 1-Fuzzy TOPSISDokument9 Seiten1-Fuzzy TOPSISHivdaNoch keine Bewertungen
- An Improved Algorithm For Imbalanced Data and Small Sample Size ClassificationDokument7 SeitenAn Improved Algorithm For Imbalanced Data and Small Sample Size ClassificationvikasbhowateNoch keine Bewertungen
- AOT - Lecture Notes V1Dokument5 SeitenAOT - Lecture Notes V1S Deva PrasadNoch keine Bewertungen
- Kernal Methods Machine LearningDokument53 SeitenKernal Methods Machine LearningpalaniNoch keine Bewertungen
- Optimization Under Uncertainty With Applications To Design of Truss StructuresDokument12 SeitenOptimization Under Uncertainty With Applications To Design of Truss StructuresGogyNoch keine Bewertungen
- One-Dimensional Optimization: Unimodal in Some Range of X, I.e., F (X) Has Only One Minimum in Some Range X X X XDokument2 SeitenOne-Dimensional Optimization: Unimodal in Some Range of X, I.e., F (X) Has Only One Minimum in Some Range X X X XhusseinNoch keine Bewertungen
- Broken Triangles: From Value Merging To A Tractable Class of General-Arity Constraint Satisfaction ProblemsDokument41 SeitenBroken Triangles: From Value Merging To A Tractable Class of General-Arity Constraint Satisfaction ProblemsMohamed Web DigitalNoch keine Bewertungen
- Backtrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractDokument9 SeitenBacktrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractslitjewsNoch keine Bewertungen
- Penalty Decomposition Methods For L - Norm MinimizationDokument26 SeitenPenalty Decomposition Methods For L - Norm MinimizationLing PiNoch keine Bewertungen
- 10.1 Golden Section Search in One Dimension: Broyden-Fletcher-Goldfarb-Shanno (BFGS) Algorithm. These MethodsDokument6 Seiten10.1 Golden Section Search in One Dimension: Broyden-Fletcher-Goldfarb-Shanno (BFGS) Algorithm. These MethodsVinay GuptaNoch keine Bewertungen
- Kobe University Repository: KernelDokument7 SeitenKobe University Repository: KernelTrần Ngọc LâmNoch keine Bewertungen
- Constraint-Handling in Nature-Inspired Numerical Optimization: Past, Present and FutureDokument22 SeitenConstraint-Handling in Nature-Inspired Numerical Optimization: Past, Present and FutureRegis QueirozNoch keine Bewertungen
- A Comprehensive Approach To Mode Clustering: Yen-Chi Chen, Christopher R. Genovese and Larry WassermanDokument32 SeitenA Comprehensive Approach To Mode Clustering: Yen-Chi Chen, Christopher R. Genovese and Larry WassermanSabyasachi BeraNoch keine Bewertungen
- Csci567 Hw1 Spring 2016Dokument9 SeitenCsci567 Hw1 Spring 2016mhasanjafryNoch keine Bewertungen
- David F. Shanno Roman L. Weil: Operations Research, Vol. 19, No. 1. (Jan. - Feb., 1971), Pp. 120-124Dokument7 SeitenDavid F. Shanno Roman L. Weil: Operations Research, Vol. 19, No. 1. (Jan. - Feb., 1971), Pp. 120-124Cơ Đinh VănNoch keine Bewertungen
- Risk Evaluation in Failure Mode and Effects Analysis Based On D Numbers TheoryDokument20 SeitenRisk Evaluation in Failure Mode and Effects Analysis Based On D Numbers TheoryasiyahNoch keine Bewertungen
- Probabilistic Feature Selection and Classification Vector MachineDokument27 SeitenProbabilistic Feature Selection and Classification Vector Machinenandini bubNoch keine Bewertungen
- Lec14 PDFDokument7 SeitenLec14 PDFjuanagallardo01Noch keine Bewertungen
- Understanding Response Surfaces: Central Composite Designs Box-Behnken DesignsDokument3 SeitenUnderstanding Response Surfaces: Central Composite Designs Box-Behnken DesignsMonir SamirNoch keine Bewertungen
- A New Efficient Algorithm For Solving Systems of Multivariate Polynomial EquationsDokument12 SeitenA New Efficient Algorithm For Solving Systems of Multivariate Polynomial EquationsgandhiranjithNoch keine Bewertungen
- Floudas2001 Global Optimization in Design Under Uncertainty Feasibility Test and Flexibility Index ProblemsDokument16 SeitenFloudas2001 Global Optimization in Design Under Uncertainty Feasibility Test and Flexibility Index ProblemsAhmed Mohamed KhalilNoch keine Bewertungen
- Mathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsDokument27 SeitenMathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsSrinivasaNoch keine Bewertungen
- 01 Intro Notes Cvxopt f22Dokument25 Seiten01 Intro Notes Cvxopt f22jchill2018Noch keine Bewertungen
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniDokument8 SeitenBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderNoch keine Bewertungen
- Improving The Performance of MIQP Solvers For Quadratic Programs With Cardinality and Minimum Threshold Constraints-A Semidefinite Program ApproachDokument27 SeitenImproving The Performance of MIQP Solvers For Quadratic Programs With Cardinality and Minimum Threshold Constraints-A Semidefinite Program ApproachShah AzNoch keine Bewertungen
- Chapter 3Dokument19 SeitenChapter 3Chandrahasa Reddy Thatimakula100% (1)
- Co-Evolutionary Particle Swarm Optimization For Min-Max Problems Using Gaussian DistributionDokument6 SeitenCo-Evolutionary Particle Swarm Optimization For Min-Max Problems Using Gaussian DistributionNaren PathakNoch keine Bewertungen
- Support Vector Machines: Review and Applications in Civil: October 2011Dokument15 SeitenSupport Vector Machines: Review and Applications in Civil: October 2011linoficNoch keine Bewertungen
- Metaheuristics Introduction 2Dokument81 SeitenMetaheuristics Introduction 2IREM SEDA YILMAZNoch keine Bewertungen
- ML Lecture 8Dokument12 SeitenML Lecture 8Avishek01Noch keine Bewertungen
- Solving Bilevel Combinatorial Optimization As Bilinear Min-Max Optimization Via A Branch-And-Cut AlgorithmDokument26 SeitenSolving Bilevel Combinatorial Optimization As Bilinear Min-Max Optimization Via A Branch-And-Cut AlgorithmShinta elptrkNoch keine Bewertungen
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDokument29 SeitenA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113Noch keine Bewertungen
- Multi-Scale Failure For Heterogeneous Materials: Link With Morphological Modeling - Complas XiDokument12 SeitenMulti-Scale Failure For Heterogeneous Materials: Link With Morphological Modeling - Complas XiRajesh ChowdaryNoch keine Bewertungen
- Davy Depth Based ClassifierDokument33 SeitenDavy Depth Based ClassifierSanjay KumarNoch keine Bewertungen
- Optimum Conditions For Equipment Disassembly and SimplicityDokument23 SeitenOptimum Conditions For Equipment Disassembly and SimplicityJomarie James LlegoNoch keine Bewertungen
- Validación Formulario CMM y Software Evaluación ToleranciaDokument10 SeitenValidación Formulario CMM y Software Evaluación ToleranciaAdolfo RodriguezNoch keine Bewertungen
- Mathematical Optimization: Fundamentals and ApplicationsVon EverandMathematical Optimization: Fundamentals and ApplicationsNoch keine Bewertungen
- Pemahaman SEC ADokument6 SeitenPemahaman SEC AZurina MANoch keine Bewertungen
- Quiz Tahun 3isDokument11 SeitenQuiz Tahun 3isZurina MANoch keine Bewertungen
- Burning TextDokument1 SeiteBurning TextZurina MANoch keine Bewertungen
- City of Boston: Charlestown East Boston Allston DowntownDokument1 SeiteCity of Boston: Charlestown East Boston Allston DowntownZurina MANoch keine Bewertungen
- EIEN10 - Wind Power Systems: TextbookDokument1 SeiteEIEN10 - Wind Power Systems: TextbookZurina MANoch keine Bewertungen
- Jollyphonicspowerpoint 120509044513 Phpapp01Dokument48 SeitenJollyphonicspowerpoint 120509044513 Phpapp01Zurina MANoch keine Bewertungen
- Curve and Surface: Prof. Ehsan T Esfahani Spring 2016Dokument10 SeitenCurve and Surface: Prof. Ehsan T Esfahani Spring 2016Zurina MANoch keine Bewertungen
- Multi Disciplinary OptimisationDokument290 SeitenMulti Disciplinary Optimisationismailovic2Noch keine Bewertungen
- Travelling Salesman Problem - Exam Questions: Question 1: Jan 2006 Q8Dokument8 SeitenTravelling Salesman Problem - Exam Questions: Question 1: Jan 2006 Q8Zurina MANoch keine Bewertungen
- Lec1 2016Dokument9 SeitenLec1 2016Zurina MANoch keine Bewertungen
- Soln 1Dokument2 SeitenSoln 1Zurina MANoch keine Bewertungen
- MAE 477/577 - Spring 2016 CAD Applications: CategoryDokument22 SeitenMAE 477/577 - Spring 2016 CAD Applications: CategoryZurina MANoch keine Bewertungen
- GEOM Lecture1a S11Dokument20 SeitenGEOM Lecture1a S11Zurina MANoch keine Bewertungen
- Assembly Speech TextDokument10 SeitenAssembly Speech TextZurina MA100% (1)
- State ManagementDokument16 SeitenState Managementnegikamal703Noch keine Bewertungen
- Biomasse-HKW Sandreuth E NQDokument8 SeitenBiomasse-HKW Sandreuth E NQValeriu StanNoch keine Bewertungen
- Astm D3359Dokument9 SeitenAstm D3359Angel GuachaminNoch keine Bewertungen
- DT NotesDokument117 SeitenDT NotestessNoch keine Bewertungen
- Defects in Welds: PorosityDokument40 SeitenDefects in Welds: PorosityrohanNoch keine Bewertungen
- Phase DiagramDokument36 SeitenPhase Diagramzainal arifinNoch keine Bewertungen
- Concept of Circulation in A Free Vortex FlowDokument55 SeitenConcept of Circulation in A Free Vortex FlowAnil KumarNoch keine Bewertungen
- Intermec CS40 SpecsDokument8 SeitenIntermec CS40 Specsss1222Noch keine Bewertungen
- HARGA REFERENSI B2S PapuaDokument6 SeitenHARGA REFERENSI B2S PapuaAbiyoga AdhityaNoch keine Bewertungen
- SdccmanDokument126 SeitenSdccmanGustavo A. Sarache MillanNoch keine Bewertungen
- Magneto Hydro Dynamics PresentationDokument19 SeitenMagneto Hydro Dynamics PresentationVipul GuptaNoch keine Bewertungen
- EMOC 208 Installation of VITT For N2 Cylinder FillingDokument12 SeitenEMOC 208 Installation of VITT For N2 Cylinder Fillingtejcd1234Noch keine Bewertungen
- Web 2.0: Dynamic Web PagesDokument12 SeitenWeb 2.0: Dynamic Web PagesAra PantaleonNoch keine Bewertungen
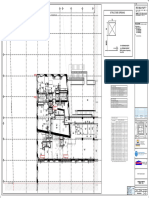
- 20105-AR-HOT-07-105-01 Rev 00Dokument1 Seite20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedNoch keine Bewertungen
- UMTS AircomDokument20 SeitenUMTS AircomDũng PhạmNoch keine Bewertungen
- TDS Sadechaf UVACRYL 2151 - v9Dokument5 SeitenTDS Sadechaf UVACRYL 2151 - v9Alex MacabuNoch keine Bewertungen
- Fluid Mechanics Seventh Edition by Frank M. WhiteDokument1 SeiteFluid Mechanics Seventh Edition by Frank M. WhiteDarKaiserNoch keine Bewertungen
- EN RotomaticDokument4 SeitenEN RotomaticnajeerwNoch keine Bewertungen
- 1998-10 The Computer Paper - Ontario EditionDokument156 Seiten1998-10 The Computer Paper - Ontario Editionthecomputerpaper100% (1)
- D6489 PDFDokument3 SeitenD6489 PDFKalindaMadusankaDasanayakaNoch keine Bewertungen
- KST GlueTech 44 enDokument80 SeitenKST GlueTech 44 enLeandro RadamesNoch keine Bewertungen
- Electro Magnetic Induction PDFDokument28 SeitenElectro Magnetic Induction PDFPuran BistaNoch keine Bewertungen
- ENOVIA V6 Product PortfolioDokument32 SeitenENOVIA V6 Product PortfolioARUN PATILNoch keine Bewertungen