Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Golf LogixDokument40 SeitenGolf LogixVivek SahNoch keine Bewertungen
- GlobalTop LadyBird 3 (PA6C) Datasheet V0E (TapeReel)Dokument36 SeitenGlobalTop LadyBird 3 (PA6C) Datasheet V0E (TapeReel)lahyouhNoch keine Bewertungen
- Unite Specifications Sercel enDokument2 SeitenUnite Specifications Sercel enAnonymous f01BFKqNoch keine Bewertungen
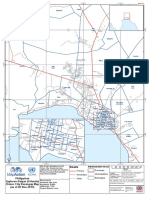
- MA516 OrmocCityReference-300dpiDokument1 SeiteMA516 OrmocCityReference-300dpiRochie Mae LuceroNoch keine Bewertungen
- Final PPTDokument32 SeitenFinal PPTShailendra RajputNoch keine Bewertungen
- GPS Spoofing (2002-2003)Dokument8 SeitenGPS Spoofing (2002-2003)Roger JohnstonNoch keine Bewertungen
- Major ProjectDokument50 SeitenMajor ProjectAnanyaNoch keine Bewertungen
- Docslide - Us - Trimble Series 4000 Reference Manual PDFDokument349 SeitenDocslide - Us - Trimble Series 4000 Reference Manual PDFMARCELO CORREANoch keine Bewertungen
- Hiper HR: Multi-Purpose Gnss ReceiverDokument4 SeitenHiper HR: Multi-Purpose Gnss ReceiverZorz ScorpionNoch keine Bewertungen
- DICOM®RF4050 VHF/UHF Vehicular Radio: Technical ParametersDokument3 SeitenDICOM®RF4050 VHF/UHF Vehicular Radio: Technical Parametersmarinecustoms.pengemNoch keine Bewertungen
- Gps Data CollectionDokument14 SeitenGps Data Collectionapi-3717973Noch keine Bewertungen
- Global Positioning SystemDokument16 SeitenGlobal Positioning SystemarchusharmaNoch keine Bewertungen
- Ieee Guide For Synchronization, Calibration, Testing, and Installation of Phasor Measurement Units (Pmus) For Power System Protection and ControlDokument107 SeitenIeee Guide For Synchronization, Calibration, Testing, and Installation of Phasor Measurement Units (Pmus) For Power System Protection and Controlthyago_hc0% (1)
- INTRODUCTIONDokument17 SeitenINTRODUCTIONerneflor papaNoch keine Bewertungen
- Gpsmap 78 Series: Owner's ManualDokument56 SeitenGpsmap 78 Series: Owner's ManualGlaizaNoch keine Bewertungen
- Top 25 Google Maps Interview Questions and AnswersDokument12 SeitenTop 25 Google Maps Interview Questions and AnswersTutorialsMateNoch keine Bewertungen
- SyncServer S200 S250 S250i User Guide RevFDokument227 SeitenSyncServer S200 S250 S250i User Guide RevFالعربي قاسميNoch keine Bewertungen
- Service Manual Trucks: Volvo Link System MID 142 Fault Codes and Troubleshooting VN, VHD Version2Dokument34 SeitenService Manual Trucks: Volvo Link System MID 142 Fault Codes and Troubleshooting VN, VHD Version2mattkidoNoch keine Bewertungen
- Catalog - GPS Tracker - Simply Classic 20191126Dokument40 SeitenCatalog - GPS Tracker - Simply Classic 20191126Oscar CaguanaNoch keine Bewertungen
- Topcon HiperproDokument2 SeitenTopcon HiperproRobinson VargasNoch keine Bewertungen
- Interfacing GPS With 8051: 8051 How-To GuideDokument12 SeitenInterfacing GPS With 8051: 8051 How-To GuideSuneelkrishna RallabhandiNoch keine Bewertungen
- Garmin Gbr23 - Beacon Receiver Owners ManualDokument24 SeitenGarmin Gbr23 - Beacon Receiver Owners ManualZemia LubaslikaNoch keine Bewertungen
- AirPrime HL6 and HL8 Series at Commands Interface Guide Rev15 0Dokument809 SeitenAirPrime HL6 and HL8 Series at Commands Interface Guide Rev15 0Lukas TamayoNoch keine Bewertungen
- Hysweep Interfacing PDFDokument74 SeitenHysweep Interfacing PDFAjay SinghNoch keine Bewertungen
- IQ3 Haltech LD Manual v2 PDFDokument92 SeitenIQ3 Haltech LD Manual v2 PDFEdwinNoch keine Bewertungen
- GPS Receiver A2135 H V02Dokument38 SeitenGPS Receiver A2135 H V02Emmanuel AcostaNoch keine Bewertungen
- A Comprehensive Review On Health Monitoring and Tracking System Designed For SoldiersDokument4 SeitenA Comprehensive Review On Health Monitoring and Tracking System Designed For SoldiersInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Setup Operations Leica Cs 15 Controller FeedDokument20 SeitenSetup Operations Leica Cs 15 Controller FeedAhmed Lotfy ElnadyNoch keine Bewertungen
- CAIT Drive Test ToolDokument53 SeitenCAIT Drive Test ToolRami A. GanniNoch keine Bewertungen
- Airband - IC-A210 Instruction ManualDokument40 SeitenAirband - IC-A210 Instruction ManualcarlvpNoch keine Bewertungen