Das könnte Ihnen auch gefallen
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDokument2 SeitenControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorNoch keine Bewertungen
- Optical Character Recognition - Project ReportDokument84 SeitenOptical Character Recognition - Project ReportKushagra Chadha100% (1)
- Voice Controlled RobotDokument62 SeitenVoice Controlled RobotSami Zama100% (1)
- Voice Controlled Vehicle For Physically Disabled Person: Presentation OnDokument15 SeitenVoice Controlled Vehicle For Physically Disabled Person: Presentation OnPooja GNoch keine Bewertungen
- Fingerprint Based Voting MachineDokument62 SeitenFingerprint Based Voting MachineNaveen Kumar83% (6)
- Smart Notice BoardDokument42 SeitenSmart Notice BoardDhiraj BhattNoch keine Bewertungen
- On "GSM BASED E-NOTICE BOARD"Dokument28 SeitenOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Control With Hand GesturesDokument18 SeitenControl With Hand GesturesAjithNoch keine Bewertungen
- Project Final ReportDokument35 SeitenProject Final ReportSimon JhaNoch keine Bewertungen
- Alarm System For Medicine Reminder Based On MicrocontrollerDokument4 SeitenAlarm System For Medicine Reminder Based On MicrocontrollerEditor IJTSRD100% (1)
- Final Report CBIR Using GUIDokument45 SeitenFinal Report CBIR Using GUIsaniyaNoch keine Bewertungen
- Pick and Place Robot Arm For Metal and Non-Metal DetectionDokument6 SeitenPick and Place Robot Arm For Metal and Non-Metal DetectionAnonymous izrFWiQ100% (1)
- Wireless RF Project Report For Web PDFDokument70 SeitenWireless RF Project Report For Web PDFpedro100% (1)
- Automatic Traffic Light Control UsingDokument35 SeitenAutomatic Traffic Light Control UsingDilyalew DebreworkNoch keine Bewertungen
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDokument19 SeitenUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautNoch keine Bewertungen
- Wireless LCD Via BluetoothDokument39 SeitenWireless LCD Via BluetoothAniket Garapati100% (1)
- Comparison of Data Encryption AlgorithmsDokument3 SeitenComparison of Data Encryption Algorithmskartikrathod10Noch keine Bewertungen
- We Use Arduino and A RTC Ds3231 Module To Display The Time and DateDokument4 SeitenWe Use Arduino and A RTC Ds3231 Module To Display The Time and DatembogNoch keine Bewertungen
- Human Robot InteractionDokument30 SeitenHuman Robot InteractionUmasree A K100% (1)
- DocDokument44 SeitenDocKhaja Mubassir UddinNoch keine Bewertungen
- E Notice Board - 2Dokument4 SeitenE Notice Board - 2Magical MKNoch keine Bewertungen
- Smart Chair SystemDokument10 SeitenSmart Chair SystemyashNoch keine Bewertungen
- Sensor-Based Gas Leakage Detector System Mini Report NewDokument48 SeitenSensor-Based Gas Leakage Detector System Mini Report NewKartik mondalNoch keine Bewertungen
- Image Text To Speech Conversion PDFDokument4 SeitenImage Text To Speech Conversion PDFarun hrNoch keine Bewertungen
- 1.automatic Engine Locking System For Drunk and Drivers MSP430Dokument3 Seiten1.automatic Engine Locking System For Drunk and Drivers MSP430Hamed Raza80% (5)
- INREPORT2Dokument34 SeitenINREPORT2Supriya PeerapurNoch keine Bewertungen
- Gourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleDokument19 SeitenGourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleRaj MandloiNoch keine Bewertungen
- Smart Helmet For Bike Rider Safety Final PPT Copy 2Dokument15 SeitenSmart Helmet For Bike Rider Safety Final PPT Copy 2Ashish PandeyNoch keine Bewertungen
- Vehical Starting System Using Finger PrintDokument18 SeitenVehical Starting System Using Finger PrintVIKASH SINGHNoch keine Bewertungen
- Artificial Intelligence Based Farmer Assistant ChatbotDokument4 SeitenArtificial Intelligence Based Farmer Assistant Chatbotkali linuxNoch keine Bewertungen
- Home Automation System Using ArduinoDokument5 SeitenHome Automation System Using ArduinoKayeNoch keine Bewertungen
- Project Report On Pick and Place RobotDokument20 SeitenProject Report On Pick and Place RobotRanvijaySharma0% (2)
- Original Project WorkDokument65 SeitenOriginal Project WorkKonda PrashanthNoch keine Bewertungen
- Android Based Bluetooth Door Lock Using Arduino PDF Documentation PDFDokument1 SeiteAndroid Based Bluetooth Door Lock Using Arduino PDF Documentation PDFRendel NalanganNoch keine Bewertungen
- PPTDokument14 SeitenPPTAnil RaghuvaranNoch keine Bewertungen
- RF Based Smart Zone Vehicle Speed Monitoring and Control SystemDokument2 SeitenRF Based Smart Zone Vehicle Speed Monitoring and Control Systemieee4mybusinessonlyNoch keine Bewertungen
- Project Report On Automated Multi Storied Car Parking SystemDokument5 SeitenProject Report On Automated Multi Storied Car Parking SystemJavaid Iqbal0% (1)
- SMS Based Notice BoardDokument85 SeitenSMS Based Notice BoardAnand Cool100% (1)
- Automatic Room Light ControllerDokument41 SeitenAutomatic Room Light Controllervipul22150% (2)
- Rotating Solar Inverter Project Using Microcontroller 50WDokument4 SeitenRotating Solar Inverter Project Using Microcontroller 50Whamed raza0% (1)
- Password Based Circuit BreakerDokument8 SeitenPassword Based Circuit BreakerRakshitha kNoch keine Bewertungen
- Project Report FinalDokument60 SeitenProject Report Finalaisha singhNoch keine Bewertungen
- Fire Fighting RobotDokument12 SeitenFire Fighting RobotTanvi100% (1)
- Report (Automatic Car Parking System) - SUMIT SARODEDokument23 SeitenReport (Automatic Car Parking System) - SUMIT SARODESumit SarodeNoch keine Bewertungen
- Final Report AcerDokument69 SeitenFinal Report AcerSandeep Parkhe0% (1)
- Intelligent Industrial Security Surveillance System With Auto SmsDokument3 SeitenIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriNoch keine Bewertungen
- Final DocDokument128 SeitenFinal DocMourya MandavaNoch keine Bewertungen
- Facial Emotion Recognition Using Machine LearningDokument10 SeitenFacial Emotion Recognition Using Machine LearningSantoshNoch keine Bewertungen
- Patient Monitoring System Using GSM For Hospitals and Old Age HomesDokument5 SeitenPatient Monitoring System Using GSM For Hospitals and Old Age Homesvgmanjunatha100% (1)
- Iot Assignment - 1: Manhole Detection and Monitoring SystemDokument5 SeitenIot Assignment - 1: Manhole Detection and Monitoring Systemj abhishekNoch keine Bewertungen
- Black Book 2019Dokument56 SeitenBlack Book 2019shubham sawantNoch keine Bewertungen
- Iot Based Waste Management and SegregationDokument5 SeitenIot Based Waste Management and SegregationInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Design and Implementation of Smart Home Using Cisco Packet Tracer Simulator 7.2Dokument21 SeitenDesign and Implementation of Smart Home Using Cisco Packet Tracer Simulator 7.2Hari kumar ReddyNoch keine Bewertungen
- Power Theft Detection SystemDokument5 SeitenPower Theft Detection SystemVivek KumarNoch keine Bewertungen
- Project Report-Final Yr (6months) - EshanDokument52 SeitenProject Report-Final Yr (6months) - EshanAshish Shukla25% (4)
- Machine-to-Machine M2M Communications Third EditionVon EverandMachine-to-Machine M2M Communications Third EditionNoch keine Bewertungen
- Modern Intelligent Instruments - Theory and ApplicationVon EverandModern Intelligent Instruments - Theory and ApplicationNoch keine Bewertungen
- Seed Sowing RobotDokument83 SeitenSeed Sowing RobotDamodara MadhukarNoch keine Bewertungen
- Learn IoT Programming Using Node-RED: Begin to Code Full Stack IoT Apps and Edge Devices with Raspberry Pi, NodeJS, and GrafanaVon EverandLearn IoT Programming Using Node-RED: Begin to Code Full Stack IoT Apps and Edge Devices with Raspberry Pi, NodeJS, and GrafanaNoch keine Bewertungen
- Low Distortion FM Generation and Detection Using Hyperabrupt Tuning DiodesDokument13 SeitenLow Distortion FM Generation and Detection Using Hyperabrupt Tuning DiodesRafael FerrazNoch keine Bewertungen
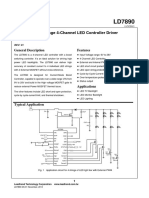
- LD7890 LeadtrendDokument16 SeitenLD7890 LeadtrendO6U Pharmacy RecordingsNoch keine Bewertungen
- Radiotron Designer's Handbook 4th EditionDokument1.524 SeitenRadiotron Designer's Handbook 4th EditionmartinNoch keine Bewertungen
- Assignment of EeeDokument4 SeitenAssignment of EeeHarshilNoch keine Bewertungen
- ELTR115 Sec1 PDFDokument96 SeitenELTR115 Sec1 PDFifeniyiNoch keine Bewertungen
- Railway Project Report ECEDokument20 SeitenRailway Project Report ECEPallabi Sarkar75% (4)
- Formula Book Final - 2Dokument111 SeitenFormula Book Final - 2Jagmeet Singh100% (1)
- 07070707Dokument1 Seite07070707ADITHYA TAMMANANoch keine Bewertungen
- Industrial Electrical Symbols: Contact UsDokument5 SeitenIndustrial Electrical Symbols: Contact Ustroy guillNoch keine Bewertungen
- EE Assignment 23-24 Sem 1Dokument7 SeitenEE Assignment 23-24 Sem 1Triggered CreatorNoch keine Bewertungen
- AC generators:AC Generators Are Known As Single-Phase Generators and Are Limited To 25kWDokument9 SeitenAC generators:AC Generators Are Known As Single-Phase Generators and Are Limited To 25kWJera ObsinaNoch keine Bewertungen
- EASA 66 Module 3 (Club66) QuestionDokument78 SeitenEASA 66 Module 3 (Club66) QuestionsureshrnalNoch keine Bewertungen
- Project On Substation 220kv 132kvDokument40 SeitenProject On Substation 220kv 132kvindianapsterNoch keine Bewertungen
- Element 3 ReviewerDokument3 SeitenElement 3 ReviewerMiyuki Henriette FujinomiyaNoch keine Bewertungen
- An Introduction To Eh AntennasDokument36 SeitenAn Introduction To Eh AntennasYayok S. Anggoro100% (1)
- Magnetic Material PropertiesDokument25 SeitenMagnetic Material PropertiesdllabarreNoch keine Bewertungen
- IFC Q & A 2 - ElectronicsDokument6 SeitenIFC Q & A 2 - ElectronicsJohn Paul M. TubigNoch keine Bewertungen
- SAITDokument2 SeitenSAITAnum ShamshadNoch keine Bewertungen
- Indutimetro Meter AdapterDokument3 SeitenIndutimetro Meter Adapterxerox4512Noch keine Bewertungen
- Difference Between AC Contactor and DC ContactorDokument5 SeitenDifference Between AC Contactor and DC ContactorKhaled RabeaNoch keine Bewertungen
- CF Aiats 02 A 2020-09-20 2020 QDokument24 SeitenCF Aiats 02 A 2020-09-20 2020 QShaestah FatimaNoch keine Bewertungen
- EKMV2-3C09B7 4PWEN65144-1 Installation Manuals EnglishDokument8 SeitenEKMV2-3C09B7 4PWEN65144-1 Installation Manuals EnglisharminsarajevoNoch keine Bewertungen
- CP18 ManualDokument72 SeitenCP18 Manualkomalinternational5Noch keine Bewertungen
- Performance Analysis of Vpi Transformer: For ContinuousDokument6 SeitenPerformance Analysis of Vpi Transformer: For ContinuousSwapan Kundu100% (1)
- Summative Test in Science 10 Week 7 & 8Dokument4 SeitenSummative Test in Science 10 Week 7 & 8Esther Mae Ann Trugillo0% (1)
- Investigation of Noise Reduction and SNR Enhancement in Search Coil Magnetometers at Low FrequenciesDokument6 SeitenInvestigation of Noise Reduction and SNR Enhancement in Search Coil Magnetometers at Low FrequenciesShahidNoch keine Bewertungen
- Electrical Machine and Control II, EP-52014Dokument33 SeitenElectrical Machine and Control II, EP-52014Kyaw LayNoch keine Bewertungen
- Advances in Vibration Engineering and Structural Dynamics PDFDokument378 SeitenAdvances in Vibration Engineering and Structural Dynamics PDFAbigor45100% (1)
- Insulation of Turbogenerators by VPI Process PDFDokument65 SeitenInsulation of Turbogenerators by VPI Process PDFprinceshankerNoch keine Bewertungen
- UntitledDokument8 SeitenUntitledSaif EzdanNoch keine Bewertungen