Das könnte Ihnen auch gefallen
- Bayesian Networks 2: Dr. Laxmidhar Behera Department of Electrical Engineering IIT KanpurDokument28 SeitenBayesian Networks 2: Dr. Laxmidhar Behera Department of Electrical Engineering IIT KanpurKuldeep SharmaNoch keine Bewertungen
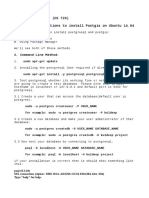
- Install PostgisDokument3 SeitenInstall PostgisKuldeep SharmaNoch keine Bewertungen
- UPSC Civil Services Exam SyllabusDokument231 SeitenUPSC Civil Services Exam Syllabusvssridhar99100% (1)
- Ch12 ResolutionTheoremProvingDokument32 SeitenCh12 ResolutionTheoremProvingKuldeep SharmaNoch keine Bewertungen
- KripkeDokument12 SeitenKripkeKuldeep SharmaNoch keine Bewertungen
- Mod 4 B Voronoi TINDokument15 SeitenMod 4 B Voronoi TINKuldeep SharmaNoch keine Bewertungen
- Economics Ch1 Concept FinalDokument19 SeitenEconomics Ch1 Concept FinalKuldeep SharmaNoch keine Bewertungen
- UPSC Civil Services Exam SyllabusDokument231 SeitenUPSC Civil Services Exam Syllabusvssridhar99100% (1)
- Ai Lecture11 Bayesnets 2upDokument22 SeitenAi Lecture11 Bayesnets 2upKuldeep SharmaNoch keine Bewertungen
- Visuals 05Dokument3 SeitenVisuals 05Kuldeep SharmaNoch keine Bewertungen
- HMMDokument28 SeitenHMMKuldeep SharmaNoch keine Bewertungen
- Ie 1Dokument1 SeiteIe 1Kuldeep SharmaNoch keine Bewertungen
- Ai Lecture11 Bayesnets 2upDokument22 SeitenAi Lecture11 Bayesnets 2upKuldeep SharmaNoch keine Bewertungen
- CTL 1Dokument42 SeitenCTL 1Kuldeep SharmaNoch keine Bewertungen
- Examples of FolDokument7 SeitenExamples of FolKuldeep Sharma100% (1)
- Bayesian Networks in Class Exercises SolutionsDokument4 SeitenBayesian Networks in Class Exercises SolutionsKuldeep SharmaNoch keine Bewertungen
- Prolog ProgrammingDokument66 SeitenProlog ProgrammingDonaldson Tan100% (2)
- Combining Lists & Built-in Predicates in PrologDokument24 SeitenCombining Lists & Built-in Predicates in PrologKuldeep SharmaNoch keine Bewertungen
- Nat Traversal of Voip Applications (Skype) : Vladislav Marinov International University BremenDokument27 SeitenNat Traversal of Voip Applications (Skype) : Vladislav Marinov International University BremenKuldeep SharmaNoch keine Bewertungen
- Cps270 MarkovDokument23 SeitenCps270 MarkovKuldeep SharmaNoch keine Bewertungen
- Bash Beginners GuideDokument178 SeitenBash Beginners Guidev155r100% (11)
- 10 SDokument6 Seiten10 SPablito JapaNoch keine Bewertungen
- Query OptimizationDokument77 SeitenQuery OptimizationeragolNoch keine Bewertungen
- Ddbms 1Dokument19 SeitenDdbms 1Kuldeep SharmaNoch keine Bewertungen
- DistrDokument59 SeitenDistrLucinda FischerNoch keine Bewertungen
- CrawlerDokument30 SeitenCrawlerKuldeep SharmaNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- DWH Techniques For Counter TerrorismDokument19 SeitenDWH Techniques For Counter Terrorismsdugar82Noch keine Bewertungen
- Encog 3 - 3 Devguide PDFDokument47 SeitenEncog 3 - 3 Devguide PDFAbianNoch keine Bewertungen
- Unsupervised K-Means Clustering Algorithm Finds Optimal Number of ClustersDokument17 SeitenUnsupervised K-Means Clustering Algorithm Finds Optimal Number of ClustersAhmad FaisalNoch keine Bewertungen
- Final Report On Face RecognitionDokument22 SeitenFinal Report On Face RecognitionSubhash Kumar67% (6)
- Autonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMDokument6 SeitenAutonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMAdeeba AliNoch keine Bewertungen
- ViscoVery SOM (Clustering)Dokument173 SeitenViscoVery SOM (Clustering)Alexandra Ana Maria NastuNoch keine Bewertungen
- The Application of Computer Vision Machine and Deep Learning AlgDokument58 SeitenThe Application of Computer Vision Machine and Deep Learning AlgCrissa Mae GannabanNoch keine Bewertungen
- 2 Matlab Machine LearningDokument12 Seiten2 Matlab Machine Learningmohamed DRISSINoch keine Bewertungen
- "Sure, I Did The Right Thing": A System For Sarcasm Detection in SpeechDokument5 Seiten"Sure, I Did The Right Thing": A System For Sarcasm Detection in SpeechRoberto RodNoch keine Bewertungen
- A Conceptual Overview of Data Mining: B.N. Lakshmi., G.H. RaghunandhanDokument6 SeitenA Conceptual Overview of Data Mining: B.N. Lakshmi., G.H. RaghunandhanM Alvinsyah RizalNoch keine Bewertungen
- Object Detection and Tracking in Video SequencesDokument6 SeitenObject Detection and Tracking in Video SequencesIDESNoch keine Bewertungen
- Module 3Dokument13 SeitenModule 3aiswaryaprathapan22Noch keine Bewertungen
- L1 CH 1 IntrodDokument97 SeitenL1 CH 1 IntrodShame BopeNoch keine Bewertungen
- An Improved K-Medoid Clustering AlgoDokument30 SeitenAn Improved K-Medoid Clustering AlgoRahul NegiNoch keine Bewertungen
- Fake News Detection - ReportDokument59 SeitenFake News Detection - ReportSANGEETHKUMAR C100% (1)
- Basic Understanding of CURE Algorithm - GeeksforGeeksDokument4 SeitenBasic Understanding of CURE Algorithm - GeeksforGeeksRavindra Kumar PrajapatiNoch keine Bewertungen
- Concise Introduction to Machine LearningDokument168 SeitenConcise Introduction to Machine LearningDr. M. LavanyaNoch keine Bewertungen
- Project Report Data VisualizationDokument23 SeitenProject Report Data Visualizationsudhanshu shekhar75% (4)
- Grokking Machine Learning v7 MEAPDokument280 SeitenGrokking Machine Learning v7 MEAPVictor Anaya100% (3)
- Automatic Morphology LearningDokument24 SeitenAutomatic Morphology LearningDevinder KumarNoch keine Bewertungen
- Btech Cs 5 Sem Data Analytics kcs051 2022Dokument2 SeitenBtech Cs 5 Sem Data Analytics kcs051 2022Raman singh ChauhanNoch keine Bewertungen
- The Role of Machine Learning Tools On Biological Systems: J. K. Meher, P. Mishra, M.K.Raval and G.N.DashDokument9 SeitenThe Role of Machine Learning Tools On Biological Systems: J. K. Meher, P. Mishra, M.K.Raval and G.N.DashInternational Journal of Creative Mathematical Sciences and TechnologyNoch keine Bewertungen
- (Applicable From The Academic Session 2018-2019) : Syllabus For B. Tech in Computer Science & EngineeringDokument24 Seiten(Applicable From The Academic Session 2018-2019) : Syllabus For B. Tech in Computer Science & EngineeringAdhara MukherjeeNoch keine Bewertungen
- Evaluating Students Performance Using K Means Clustering IJERTV6IS050070Dokument3 SeitenEvaluating Students Performance Using K Means Clustering IJERTV6IS050070Tracker DeathNoch keine Bewertungen
- Robust Coverless Image Steganography Based On Neglected Coverless Image Dataset ConstructionDokument13 SeitenRobust Coverless Image Steganography Based On Neglected Coverless Image Dataset ConstructionSowmya100% (1)
- Internship Report-1Dokument27 SeitenInternship Report-1Syed Hashsham AlamNoch keine Bewertungen
- Fuzzy C-Means Clustering Protocol For Wireless Sensor NetworksDokument6 SeitenFuzzy C-Means Clustering Protocol For Wireless Sensor NetworksVijitendra DNoch keine Bewertungen
- Certificate in Big Data Analytics For Business and ManagementDokument17 SeitenCertificate in Big Data Analytics For Business and ManagementMeenal Luther NhürNoch keine Bewertungen
- Project ReportDokument7 SeitenProject ReportM Shahid KhanNoch keine Bewertungen
- GIS, Remote Sensing - Applications in The Health SciencesDokument231 SeitenGIS, Remote Sensing - Applications in The Health ScienceslynxnetNoch keine Bewertungen