Das könnte Ihnen auch gefallen
- 4643two Way Slabs1Dokument75 Seiten4643two Way Slabs1MILTONGALARZANoch keine Bewertungen
- NRMA Open Road November/December 2022Dokument10 SeitenNRMA Open Road November/December 2022andrewb2005Noch keine Bewertungen
- LTC Deligation - Guide v1.3Dokument36 SeitenLTC Deligation - Guide v1.3andrewb2005Noch keine Bewertungen
- SPEL Puraceptor Class 1 ServiceStation AUS v1Dokument4 SeitenSPEL Puraceptor Class 1 ServiceStation AUS v1andrewb2005Noch keine Bewertungen
- Lysaght Referee - 35th Edition Book (2021)Dokument471 SeitenLysaght Referee - 35th Edition Book (2021)andrewb2005Noch keine Bewertungen
- Smart MetersDokument11 SeitenSmart Metersandrewb2005Noch keine Bewertungen
- Dell 2208WFP User Guide (2007 A00)Dokument30 SeitenDell 2208WFP User Guide (2007 A00)andrewb2005Noch keine Bewertungen
- NRMA Open Road - September/October 2022Dokument13 SeitenNRMA Open Road - September/October 2022andrewb2005Noch keine Bewertungen
- Lysaght Referee - 34th Edition Book (2019)Dokument466 SeitenLysaght Referee - 34th Edition Book (2019)andrewb2005Noch keine Bewertungen
- Residential Footing Design On Expansive Soils - Sun Et Al (EJGE 2017 Vol 22)Dokument26 SeitenResidential Footing Design On Expansive Soils - Sun Et Al (EJGE 2017 Vol 22)andrewb2005Noch keine Bewertungen
- SPEL Puraceptor Class 1 ServiceStation AUS v1Dokument4 SeitenSPEL Puraceptor Class 1 ServiceStation AUS v1andrewb2005Noch keine Bewertungen
- Csy On Grass and Gravel Bartlett 2009Dokument9 SeitenCsy On Grass and Gravel Bartlett 2009andrewb2005Noch keine Bewertungen
- Buildex: Product Technical Data SheetDokument2 SeitenBuildex: Product Technical Data Sheetandrewb2005Noch keine Bewertungen
- AS1670.1-2015 SeminarDokument14 SeitenAS1670.1-2015 Seminarandrewb20050% (2)
- Whitco Window BoltDokument2 SeitenWhitco Window Boltandrewb2005Noch keine Bewertungen
- Purl in 4600Dokument9 SeitenPurl in 4600Hendra GintingNoch keine Bewertungen
- Design Guide 2009Dokument80 SeitenDesign Guide 2009johncolalancia100% (7)
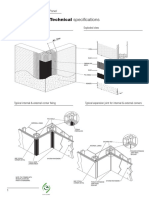
- Technical Specifications of EXIN Lightweight Building PanelDokument6 SeitenTechnical Specifications of EXIN Lightweight Building Panelandrewb20050% (1)
- HySPAN Span Guide 28pp Sep11Dokument28 SeitenHySPAN Span Guide 28pp Sep11Prasascribd100% (1)
- ARC (AU) - Reinforcement Handbook, Your Guide To Steel ReinformecentDokument78 SeitenARC (AU) - Reinforcement Handbook, Your Guide To Steel Reinformecentmica100% (1)
- Future Foams EPS Waffle Pod Manual 2015Dokument6 SeitenFuture Foams EPS Waffle Pod Manual 2015andrewb2005Noch keine Bewertungen
- BS 10-012 Slips Trips FallsDokument1 SeiteBS 10-012 Slips Trips Fallsandrewb2005Noch keine Bewertungen
- Win10 Compare TableDokument5 SeitenWin10 Compare Tableandrewb2005Noch keine Bewertungen
- Double Hung WindowDokument1 SeiteDouble Hung Windowandrewb2005Noch keine Bewertungen
- Di Marzio Research Report on Trips, Slips and Falls ProjectDokument29 SeitenDi Marzio Research Report on Trips, Slips and Falls Projectandrewb2005Noch keine Bewertungen
- Beam Over ColumnDokument1 SeiteBeam Over Columnandrewb2005Noch keine Bewertungen
- Slip Trips and FallsDokument241 SeitenSlip Trips and Fallsandrewb2005Noch keine Bewertungen
- Slip Trips and FallsDokument12 SeitenSlip Trips and Fallsandrewb2005Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Peperiksaan Pertengahan Tahun 2011Dokument19 SeitenPeperiksaan Pertengahan Tahun 2011Jill Peary RajuNoch keine Bewertungen
- Reaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbineDokument16 SeitenReaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbinesaitejaNoch keine Bewertungen
- Chemical Engineering Apparatus Design: Chapter-1Dokument53 SeitenChemical Engineering Apparatus Design: Chapter-1Eshetu ShemetNoch keine Bewertungen
- M.E (Structural Engineering) - Handbook SyllabusDokument33 SeitenM.E (Structural Engineering) - Handbook SyllabusJAVVAJI AKHILNoch keine Bewertungen
- Simulating Blade Loss in Low Pressure TurbinesDokument10 SeitenSimulating Blade Loss in Low Pressure Turbinesshiva_a341Noch keine Bewertungen
- Lifting Design Using Rebars: Details of PanelDokument3 SeitenLifting Design Using Rebars: Details of PanelAsaru Deen100% (2)
- Projectile Motion Lab Syeed HasanDokument8 SeitenProjectile Motion Lab Syeed Hasanapi-130453141Noch keine Bewertungen
- Journal Bearing Lubrication Theory and DesignDokument17 SeitenJournal Bearing Lubrication Theory and DesignAndres Alberto Osorio YupanquiNoch keine Bewertungen
- LRFD-BASED ANALYSIS AND DESIGN OF BEARINGS IN BRIDGES 9-24-2010 Compressed PDFDokument370 SeitenLRFD-BASED ANALYSIS AND DESIGN OF BEARINGS IN BRIDGES 9-24-2010 Compressed PDFFrancis Domingo100% (1)
- Waves and Sound-04 - AssignmentDokument15 SeitenWaves and Sound-04 - AssignmentRaju SinghNoch keine Bewertungen
- Angular Speed and Satellite OrbitDokument11 SeitenAngular Speed and Satellite OrbitAbhay RanjitNoch keine Bewertungen
- 5.3.conjugate Beam MethodDokument14 Seiten5.3.conjugate Beam MethodRemylin De GuzmanNoch keine Bewertungen
- 2-4 Shell and Tube Heat Exchanger (Problem)Dokument35 Seiten2-4 Shell and Tube Heat Exchanger (Problem)Shaikh Hammad KaleemNoch keine Bewertungen
- Airfoil Design GuideDokument18 SeitenAirfoil Design GuidePatricia McIntire100% (1)
- CRET Class 01 - 10 - 2013Dokument15 SeitenCRET Class 01 - 10 - 2013Erj DaniyaroffNoch keine Bewertungen
- Ch02 Homework Answers PDFDokument114 SeitenCh02 Homework Answers PDFLEONARDO VIVANCOSNoch keine Bewertungen
- Kinematics Test W SolutionsDokument5 SeitenKinematics Test W SolutionsNicholas ChevalierNoch keine Bewertungen
- Fluid Statics PDFDokument3 SeitenFluid Statics PDFAnisa RachmanNoch keine Bewertungen
- Finite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFDokument17 SeitenFinite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFAndrésHermannR.LeónNoch keine Bewertungen
- Knuckle JointDokument16 SeitenKnuckle Jointtushar035100% (5)
- Lewis F. Moody, Friction Factor For Pipe Flow, 1944Dokument19 SeitenLewis F. Moody, Friction Factor For Pipe Flow, 1944Lion Rock0% (1)
- DYNAMIC MODELLING AND CONTROL OF A 3-DOF PLANAR PARALLEL ROBOTIC (XYthetaZ MOTION) PLATFORMDokument10 SeitenDYNAMIC MODELLING AND CONTROL OF A 3-DOF PLANAR PARALLEL ROBOTIC (XYthetaZ MOTION) PLATFORMVinoth VenkatesanNoch keine Bewertungen
- UniversityPhysicsVolume2 WEB 5eNhMSaDokument805 SeitenUniversityPhysicsVolume2 WEB 5eNhMSaTrong Nhan Do100% (1)
- As Revision 2016Dokument3 SeitenAs Revision 2016Gayathri GananathapillaiNoch keine Bewertungen
- Single and Two Plane Using Influence CoefficientDokument16 SeitenSingle and Two Plane Using Influence CoefficientJuan Angel Martinez RamirezNoch keine Bewertungen
- Physics Formula SheetDokument4 SeitenPhysics Formula SheetFrozen FlameNoch keine Bewertungen
- Physics 101 Chapter 8 RotationDokument52 SeitenPhysics 101 Chapter 8 RotationAndrew GoolsbyNoch keine Bewertungen
- MK Sir1-150Dokument21 SeitenMK Sir1-150The Helping Hand InfinityNoch keine Bewertungen
- Journal of Constructional Steel Research Volume 10 Issue None 1988 (Doi 10.1016 - 0143-974x (88) 90034-x) Egor P. Popov Michael D. Engelhardt - Seismic Eccentrically Braced Frames PDFDokument34 SeitenJournal of Constructional Steel Research Volume 10 Issue None 1988 (Doi 10.1016 - 0143-974x (88) 90034-x) Egor P. Popov Michael D. Engelhardt - Seismic Eccentrically Braced Frames PDFrizky tri amaliaNoch keine Bewertungen
- Practice ProblemsDokument1 SeitePractice Problemsالغزيزال الحسن EL GHZIZAL HassaneNoch keine Bewertungen