Das könnte Ihnen auch gefallen
- 110 Waveform Generator Projects for the Home ConstructorVon Everand110 Waveform Generator Projects for the Home ConstructorBewertung: 4 von 5 Sternen4/5 (1)
- Tut6 Ac MachinesDokument3 SeitenTut6 Ac MachinesMohit KeshriNoch keine Bewertungen
- Eee 321Dokument7 SeitenEee 321faisal sbennaNoch keine Bewertungen
- Em CepDokument10 SeitenEm CepShahrukh HussainNoch keine Bewertungen
- Optimum Motor Protection en - LIBRODokument80 SeitenOptimum Motor Protection en - LIBROEdgardo Kat ReyesNoch keine Bewertungen
- Chapter3 InductionmachineDokument25 SeitenChapter3 InductionmachineAbhijitNoch keine Bewertungen
- EEE 321 Marking SchemeDokument8 SeitenEEE 321 Marking Schemefaisal sbennaNoch keine Bewertungen
- Synchronous MachinesDokument19 SeitenSynchronous MachinesPac ManNoch keine Bewertungen
- Induction MotorDokument39 SeitenInduction MotorAhmed MagdyNoch keine Bewertungen
- Solving DC Motors Simple Torque Problems PDFDokument8 SeitenSolving DC Motors Simple Torque Problems PDFRv EstebanNoch keine Bewertungen
- Solving DC Motors Simple Torque Problems PDFDokument8 SeitenSolving DC Motors Simple Torque Problems PDFRv EstebanNoch keine Bewertungen
- Induction MachineDokument48 SeitenInduction MachinechethanNoch keine Bewertungen
- Taken From Course Structure 3 Phase Induction MachinesDokument18 SeitenTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodNoch keine Bewertungen
- Power Systems AssignmentDokument12 SeitenPower Systems AssignmentJbmulindwaNoch keine Bewertungen
- Ee 2403 Special Electrical MachinesDokument21 SeitenEe 2403 Special Electrical MachinesSurya KrishnanNoch keine Bewertungen
- Karakteristik Motor KomponDokument14 SeitenKarakteristik Motor KomponPola RismaNoch keine Bewertungen
- Applied Electronics and Electrical MachinesDokument30 SeitenApplied Electronics and Electrical MachinesdenNoch keine Bewertungen
- Doubly Fed Induction Generator For Wind TurbinesDokument21 SeitenDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashNoch keine Bewertungen
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Dokument32 SeitenFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyNoch keine Bewertungen
- ReportDokument10 SeitenReportAsz WaNieNoch keine Bewertungen
- Induction Machines & Synchrnous Machines New-2Dokument74 SeitenInduction Machines & Synchrnous Machines New-2thamizmaniNoch keine Bewertungen
- Ac Motors War-MebDokument10 SeitenAc Motors War-MebolingxjcNoch keine Bewertungen
- AC MachineDokument67 SeitenAC MachineNebyou DanielNoch keine Bewertungen
- ELE3114 Tutorial April 2022Dokument6 SeitenELE3114 Tutorial April 2022Sahiil MauriceNoch keine Bewertungen
- Ied Unit VDokument8 SeitenIed Unit VRudra Kumar MishraNoch keine Bewertungen
- Starting Methods of Syncronous Motor Criollo - RoggerDokument7 SeitenStarting Methods of Syncronous Motor Criollo - RoggerRogger FabricioNoch keine Bewertungen
- Synchronous Machines-Part 0Dokument49 SeitenSynchronous Machines-Part 0An00pgadzillaNoch keine Bewertungen
- Eee 205-W1Dokument24 SeitenEee 205-W1mahamudul hasan100% (1)
- ED Lab Manual Original - Exp 1 To Exp 5Dokument19 SeitenED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNoch keine Bewertungen
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDokument9 SeitenSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNoch keine Bewertungen
- Induction MotorDokument39 SeitenInduction MotorSaneer M SaliNoch keine Bewertungen
- Tutorial 3 19BME069Dokument14 SeitenTutorial 3 19BME06920BME005 INAM SABRINoch keine Bewertungen
- Energy Conversion and Transport: George G. Karady & Keith HolbertDokument32 SeitenEnergy Conversion and Transport: George G. Karady & Keith HolbertfieraminaNoch keine Bewertungen
- Cascada SubsincronaDokument7 SeitenCascada Subsincronafrsantos123Noch keine Bewertungen
- Question Bank of PC EE 401Dokument7 SeitenQuestion Bank of PC EE 401Isabella SwanNoch keine Bewertungen
- Sensorless FOC of ACI - 2833xDokument45 SeitenSensorless FOC of ACI - 2833xJavier RuizNoch keine Bewertungen
- Speed Control 2Dokument2 SeitenSpeed Control 2clinthen100% (1)
- E M II: Synchronous MachineDokument10 SeitenE M II: Synchronous MachineAkashman ShakyaNoch keine Bewertungen
- Question Bank Ac MachinesDokument4 SeitenQuestion Bank Ac Machinesashwin paulNoch keine Bewertungen
- Universal Motor Mecha 123Dokument5 SeitenUniversal Motor Mecha 123عمار الشهاريNoch keine Bewertungen
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDokument7 SeitenA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNoch keine Bewertungen
- A Three Phase Short Circuit Occurring at Alternator Synchronous MachineDokument27 SeitenA Three Phase Short Circuit Occurring at Alternator Synchronous MachineMerlose PlaceNoch keine Bewertungen
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDokument14 SeitenAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNoch keine Bewertungen
- Chapter-5 Synchronous MacineDokument30 SeitenChapter-5 Synchronous MacineAman BazeNoch keine Bewertungen
- Scalar V-F Control of 3-Phase Induction Motors - 2803xDokument25 SeitenScalar V-F Control of 3-Phase Induction Motors - 2803xRaghu KodiNoch keine Bewertungen
- Speed Control of Induction Motor PDFDokument12 SeitenSpeed Control of Induction Motor PDFbalaer05Noch keine Bewertungen
- Electrical Machines1 PDFDokument178 SeitenElectrical Machines1 PDFnivashini a0% (1)
- Synchronous Reluctance Motor - PPSXDokument22 SeitenSynchronous Reluctance Motor - PPSXselraj0708Noch keine Bewertungen
- Ac Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUODokument21 SeitenAc Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUOMuhd AkmalNoch keine Bewertungen
- Determining Rotor Leakage ReactanceDokument5 SeitenDetermining Rotor Leakage ReactanceGaspar RodríguezNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetVon EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Unit 4 LP - Nandhakumar ADokument17 SeitenUnit 4 LP - Nandhakumar AnandhakumarmeNoch keine Bewertungen
- 15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesDokument3 Seiten15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesnandhakumarmeNoch keine Bewertungen
- Three Phase TransformersDokument15 SeitenThree Phase TransformersnandhakumarmeNoch keine Bewertungen
- Auxiliary Word For RBT, BIT-1Dokument1 SeiteAuxiliary Word For RBT, BIT-1nandhakumarmeNoch keine Bewertungen
- Miles To KMDokument2 SeitenMiles To KMnandhakumarmeNoch keine Bewertungen
- Power Electronics Objective Questions With Answers: Part-10: Answer: BDokument3 SeitenPower Electronics Objective Questions With Answers: Part-10: Answer: BnandhakumarmeNoch keine Bewertungen
- Structure of Power SystemDokument14 SeitenStructure of Power Systemnandhakumarme100% (1)
- Obtain The Boolean Expression For The Circuit and Verify Its Truth TableDokument2 SeitenObtain The Boolean Expression For The Circuit and Verify Its Truth TablenandhakumarmeNoch keine Bewertungen
- Gate Questions 2Dokument6 SeitenGate Questions 2nandhakumarmeNoch keine Bewertungen
- S7 Attendance Summary Report 141EE123 To 141EE144Dokument2 SeitenS7 Attendance Summary Report 141EE123 To 141EE144nandhakumarmeNoch keine Bewertungen
- Circuit Breakers IDokument21 SeitenCircuit Breakers InandhakumarmeNoch keine Bewertungen
- Lic QPDokument4 SeitenLic QPnandhakumarmeNoch keine Bewertungen
- Thyristor MCQDokument6 SeitenThyristor MCQnandhakumarme0% (3)
- PartDokument9 SeitenPartnandhakumarmeNoch keine Bewertungen
- 1.3 Series and Parallel Resistance NewDokument32 Seiten1.3 Series and Parallel Resistance Newnandhakumarme64% (11)
- Procurement of Consumable ItemsDokument16 SeitenProcurement of Consumable ItemsnandhakumarmeNoch keine Bewertungen
- 1.1 Energy BalanceDokument25 Seiten1.1 Energy BalancenandhakumarmeNoch keine Bewertungen
- Emf MethodDokument37 SeitenEmf MethodnandhakumarmeNoch keine Bewertungen
- The Invention of The Electric Motor 1800Dokument40 SeitenThe Invention of The Electric Motor 1800nandhakumarmeNoch keine Bewertungen
- Zener DiodeDokument78 SeitenZener DiodenandhakumarmeNoch keine Bewertungen
- Electrical Machines 1 University QuestionsDokument4 SeitenElectrical Machines 1 University QuestionsnandhakumarmeNoch keine Bewertungen
- One MarkDokument5 SeitenOne MarknandhakumarmeNoch keine Bewertungen
- Pole-Amplitude ModulationDokument6 SeitenPole-Amplitude ModulationnandhakumarmeNoch keine Bewertungen
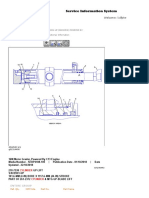
- CAT 16M Blade Lift CylinderDokument2 SeitenCAT 16M Blade Lift CylinderSHANENoch keine Bewertungen
- Full Inyection NEW HollandDokument66 SeitenFull Inyection NEW HollandERMINSUL VICUÑA SALAS100% (1)
- Assembly and Parts Drawing IG2600: 3KW Generator KD (M) 30 (A) - 02000 Control Panel Assembly KGE3000Ti-13100Dokument6 SeitenAssembly and Parts Drawing IG2600: 3KW Generator KD (M) 30 (A) - 02000 Control Panel Assembly KGE3000Ti-13100Youssef BeheryNoch keine Bewertungen
- New Generation N62 Engine: Course Contents/Background MaterialDokument145 SeitenNew Generation N62 Engine: Course Contents/Background Materialabdull rehmanNoch keine Bewertungen
- Interference Type or Not EngineDokument12 SeitenInterference Type or Not EnginemikeNoch keine Bewertungen
- DD13 Engine Harness PDFDokument2 SeitenDD13 Engine Harness PDFalejandro sanchezNoch keine Bewertungen
- Power EngineeringDokument5 SeitenPower EngineeringShriram SinghNoch keine Bewertungen
- Doosan P126tiDokument205 SeitenDoosan P126tiFredKemil100% (4)
- KG390 Engine Service Manual: The Coast Distribution System, Ver. 2, October 1, 2007Dokument32 SeitenKG390 Engine Service Manual: The Coast Distribution System, Ver. 2, October 1, 2007АлексейNoch keine Bewertungen
- Motor Nissan KA24DEDokument1.198 SeitenMotor Nissan KA24DENestor A Castillo GNoch keine Bewertungen
- Compression Ratio PDFDokument6 SeitenCompression Ratio PDFRafael LuqueNoch keine Bewertungen
- Mast Parst Catalog: 5t-10t X Series Internal Combustion Counterbalanced Forklift TruckDokument182 SeitenMast Parst Catalog: 5t-10t X Series Internal Combustion Counterbalanced Forklift TruckBliblibloNoch keine Bewertungen
- Everett C. Hunt,: Alan OsbourneDokument835 SeitenEverett C. Hunt,: Alan OsbourneOnur ÖksüzoğluNoch keine Bewertungen
- Corvette Throttle LearnDokument2 SeitenCorvette Throttle Learnzachariah321Noch keine Bewertungen
- Man 7g50meDokument18 SeitenMan 7g50meSalih Tuğrul SarıNoch keine Bewertungen
- Atb2 100 Piston CompressorDokument2 SeitenAtb2 100 Piston CompressorClariss CrisolNoch keine Bewertungen
- MAN-Service Experience 2010Dokument34 SeitenMAN-Service Experience 2010OlekNoch keine Bewertungen
- Evinrude E-Tech Parts Catalog 115hpDokument40 SeitenEvinrude E-Tech Parts Catalog 115hpPAVLOSNoch keine Bewertungen
- Yanmar 6HAL2N Major OHDokument11 SeitenYanmar 6HAL2N Major OHSafix Yazid100% (1)
- Polaris Trail Blazer 250 2003 Parts ManualDokument44 SeitenPolaris Trail Blazer 250 2003 Parts ManualRafael RosasNoch keine Bewertungen
- Steam Turbine 2022Dokument18 SeitenSteam Turbine 2022Proshenjit BaruaNoch keine Bewertungen
- Piston and Rings 3126BDokument3 SeitenPiston and Rings 3126BGerardo100% (1)
- Catalog CombinedDokument64 SeitenCatalog Combinedflanker_13Noch keine Bewertungen
- Oil Sealed Rotary PumpsDokument1 SeiteOil Sealed Rotary PumpsTufail AhmedNoch keine Bewertungen
- Flash Codes 1106D Industrial EnginesDokument1 SeiteFlash Codes 1106D Industrial EnginesIvica MuzekNoch keine Bewertungen
- Mitsubishi - Commercial Spec Sheets - Industrial Engine - Variable Speed - L3E-Z564SPHDokument1 SeiteMitsubishi - Commercial Spec Sheets - Industrial Engine - Variable Speed - L3E-Z564SPHTECNOLOGO LOGISTICO PAPAMIJA SALGADONoch keine Bewertungen
- MERCEDES W123 Serv Manual Engine 617 - 95 - TDDokument532 SeitenMERCEDES W123 Serv Manual Engine 617 - 95 - TDriomaior94% (32)
- Gas Turb 10Dokument224 SeitenGas Turb 10Mohammad Ali AkhtardaneshNoch keine Bewertungen
- R Parts List: WarningDokument2 SeitenR Parts List: WarningnicolaeNoch keine Bewertungen
- AGILITY 200i (16) KF40AA (GR) .Dokument109 SeitenAGILITY 200i (16) KF40AA (GR) .Papas MamasNoch keine Bewertungen