Das könnte Ihnen auch gefallen
- A Study of An Optical Mouse To Customize Ii For Implementation of Wireless Draw PenDokument3 SeitenA Study of An Optical Mouse To Customize Ii For Implementation of Wireless Draw PenEditor IJRITCCNoch keine Bewertungen
- K5-Nota Kuliah OSHADokument9 SeitenK5-Nota Kuliah OSHAMuhamad Ismail Mohd JamilNoch keine Bewertungen
- JKR 4.4 TABC - Air Cooled Package SystemDokument22 SeitenJKR 4.4 TABC - Air Cooled Package SystemAniq AimanNoch keine Bewertungen
- Engineering Metrology & Measurements NotesDokument48 SeitenEngineering Metrology & Measurements NotesJeevanandam Shanmuga100% (1)
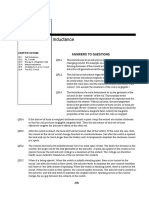
- SolutionChap32 PDFDokument25 SeitenSolutionChap32 PDFChai Usajai Usajai100% (1)
- Kertas Penerangan FullDokument50 SeitenKertas Penerangan FullPAUL KENNY TSHONGNoch keine Bewertungen
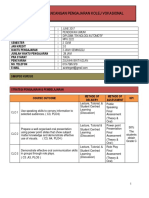
- Course Outline - DEA 2313Dokument11 SeitenCourse Outline - DEA 2313Roger JohnNoch keine Bewertungen
- Course Outline: Perancangan KursusDokument8 SeitenCourse Outline: Perancangan KursusAnonymous V76nXvDAGNoch keine Bewertungen
- KSKV SVM 2017: SMAW 1 Course InformationDokument20 SeitenKSKV SVM 2017: SMAW 1 Course InformationNurun NazirahNoch keine Bewertungen
- Nota Kuliah (4) PREPARE PRODUCT REPORTDokument26 SeitenNota Kuliah (4) PREPARE PRODUCT REPORTAdrian SamuelNoch keine Bewertungen
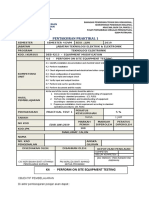
- Nota Praktikal 5 (Inspect - Testing) - EditDokument11 SeitenNota Praktikal 5 (Inspect - Testing) - EditMuhammad Ilyasak Abdul HalimNoch keine Bewertungen
- Choosing the Correct SensorDokument11 SeitenChoosing the Correct Sensorkarim mohamedNoch keine Bewertungen
- Smart Helmet Alcohol Detection and Sleep AlertDokument4 SeitenSmart Helmet Alcohol Detection and Sleep AlertEditor IJTSRDNoch keine Bewertungen
- Perform basic robot control (40/40Dokument5 SeitenPerform basic robot control (40/40Walid FarHanNoch keine Bewertungen
- Lab Sheet Teknologi Elektrik No 1-Rev1Dokument11 SeitenLab Sheet Teknologi Elektrik No 1-Rev1semi2542Noch keine Bewertungen
- MC-091 L3 KK 1 6Dokument6 SeitenMC-091 L3 KK 1 6bmrajahNoch keine Bewertungen
- Soalan Ujian HidraulikDokument9 SeitenSoalan Ujian HidraulikDilla AfzanNoch keine Bewertungen
- Mobile Air Conditioner ManualDokument18 SeitenMobile Air Conditioner Manualmalaikat maut100% (1)
- ElbaDokument17 SeitenElbacathytingNoch keine Bewertungen
- RSL Etn 2023Dokument3 SeitenRSL Etn 2023Masila IsmailNoch keine Bewertungen
- Tajuk PSM Sem1 1011Dokument28 SeitenTajuk PSM Sem1 1011khairul_husniNoch keine Bewertungen
- Kertas Penerangan C01Dokument14 SeitenKertas Penerangan C01AngelinaNoch keine Bewertungen
- Skills Competition (Mechatronics)Dokument13 SeitenSkills Competition (Mechatronics)Putri Chairany100% (1)
- Practical Test 1 k4Dokument5 SeitenPractical Test 1 k4Vicea NurrNoch keine Bewertungen
- A) Discuss How Student Can Plan For A Successful Laboratory Assignment SubmissionDokument2 SeitenA) Discuss How Student Can Plan For A Successful Laboratory Assignment SubmissionNazhan HakeemNoch keine Bewertungen
- K1-Nota Kuliah OSHADokument8 SeitenK1-Nota Kuliah OSHAMuhamad Ismail Mohd JamilNoch keine Bewertungen
- Cara Import Meteo Data From Different SourceDokument4 SeitenCara Import Meteo Data From Different SourceKania ZahrawatiNoch keine Bewertungen
- PMMC & Moving IronDokument51 SeitenPMMC & Moving IronNiladri DeyNoch keine Bewertungen
- Lukisan Kejuruteraan ReportDokument18 SeitenLukisan Kejuruteraan Reportaq laparNoch keine Bewertungen
- Jadual Peratusan Masa C02 6.8Dokument6 SeitenJadual Peratusan Masa C02 6.8Cucu MaAtok MeseiryNoch keine Bewertungen
- Industrial AC MotorsDokument86 SeitenIndustrial AC Motorsandry wibowoNoch keine Bewertungen
- Pseudocode Methods for Parking Charges, Exponentiation, Temperature Conversion and MoreDokument1 SeitePseudocode Methods for Parking Charges, Exponentiation, Temperature Conversion and MoreALan d'ToDz CRewNoch keine Bewertungen
- Sistem PenggeraDokument35 SeitenSistem PenggeraThinesNoch keine Bewertungen
- Electronics Programme Structure Vocational College MalaysiaDokument2 SeitenElectronics Programme Structure Vocational College MalaysiaNoradawiyah AzmanNoch keine Bewertungen
- Latihan JedaDokument9 SeitenLatihan JedaRizal MaslahNoch keine Bewertungen
- Tensile Test AnalysisDokument8 SeitenTensile Test AnalysisNazmul HasanNoch keine Bewertungen
- 3.syllabus Deb 1133Dokument7 Seiten3.syllabus Deb 1133AngelinaNoch keine Bewertungen
- Cover Page - PHY094 Entrepreneurial Mindset Assignment - StudentDokument2 SeitenCover Page - PHY094 Entrepreneurial Mindset Assignment - StudentApik YaaNoch keine Bewertungen
- KSKV Etn1013 - Electronic Schematic DrawingDokument12 SeitenKSKV Etn1013 - Electronic Schematic DrawingNur Hafizah RazaliNoch keine Bewertungen
- Mechanical Engineering Department: Djj3053 - Engineering Mechanics Lab: Velocity and AccelerationDokument8 SeitenMechanical Engineering Department: Djj3053 - Engineering Mechanics Lab: Velocity and AccelerationMuhd AriffNoch keine Bewertungen
- Chapter 1 - Aircond & VentilationDokument54 SeitenChapter 1 - Aircond & Ventilationepy87Noch keine Bewertungen
- Trolley Turning and Lifting Mechanism: Ayneendra B, Mohd Salman, Jimmy Thaddeus Ojyok Attari, Marvan EDokument8 SeitenTrolley Turning and Lifting Mechanism: Ayneendra B, Mohd Salman, Jimmy Thaddeus Ojyok Attari, Marvan ERahul PrasadNoch keine Bewertungen
- 4.syllabus - Deb1143 - Digital Electronic and ApplicationDokument7 Seiten4.syllabus - Deb1143 - Digital Electronic and ApplicationadibNoch keine Bewertungen
- PT326-Round2 Expt3 Batch19Dokument6 SeitenPT326-Round2 Expt3 Batch19Radhey MeenaNoch keine Bewertungen
- P.praktikal - Kertas Untuk Jawapan Amali (Power Supply)Dokument15 SeitenP.praktikal - Kertas Untuk Jawapan Amali (Power Supply)Angelina100% (1)
- Introducing Science Daily Lesson PlansDokument27 SeitenIntroducing Science Daily Lesson PlansaldruzzNoch keine Bewertungen
- Silibus Sem 1 - Sem 3 A17Dokument139 SeitenSilibus Sem 1 - Sem 3 A17Hariq Hann0% (1)
- Mechatronic Course OutlineDokument8 SeitenMechatronic Course OutlineAnonymous V76nXvDAGNoch keine Bewertungen
- Lab Sheet Dea 2342 - 1Dokument6 SeitenLab Sheet Dea 2342 - 1Kero Malek100% (1)
- Lab Sheet 5 - Lukisan Mesin Elektrik - 2Dokument8 SeitenLab Sheet 5 - Lukisan Mesin Elektrik - 2Amirul WanNoch keine Bewertungen
- Solar Electric Fencing System Protects CropsDokument18 SeitenSolar Electric Fencing System Protects Cropsshivani jadhavNoch keine Bewertungen
- Pelan Mengajar (Amali) : Institut Wawasan, 50 & 50A, Lorong Semarak 1, Taman Semarak, 09000 KULIM, Kedah Darul AmanDokument5 SeitenPelan Mengajar (Amali) : Institut Wawasan, 50 & 50A, Lorong Semarak 1, Taman Semarak, 09000 KULIM, Kedah Darul AmanEllyYanaNoch keine Bewertungen
- Tudung Saji InovasiDokument4 SeitenTudung Saji InovasiAly Rajaie Anna RusliNoch keine Bewertungen
- Kertas Penerangan 2Dokument35 SeitenKertas Penerangan 2zamreeharunNoch keine Bewertungen
- TJJWDokument57 SeitenTJJWAdam MusavvirNoch keine Bewertungen
- Rancangan Pengajaran Kolej VokasionalDokument22 SeitenRancangan Pengajaran Kolej VokasionalAizi ElegantNoch keine Bewertungen
- Stick Blind ManDokument4 SeitenStick Blind ManجعفرالشموسيNoch keine Bewertungen
- Accurate Real Time Altitude Estimation PDFDokument5 SeitenAccurate Real Time Altitude Estimation PDFMartin Manullang100% (1)
- Cavallo 2014Dokument7 SeitenCavallo 2014Trần Hoàng LâmNoch keine Bewertungen
- Intelligent Active Range Sensor for Vehicle GuidanceDokument8 SeitenIntelligent Active Range Sensor for Vehicle GuidanceUtsav V ByndoorNoch keine Bewertungen
- Introduction and Overview - Probabilistic Graphical ModelsDokument15 SeitenIntroduction and Overview - Probabilistic Graphical ModelsRobert PetersonNoch keine Bewertungen
- Characterization of A Low-Cost Optical Flow Sensor When Using An External Laser As A Direct Illumination SourceDokument15 SeitenCharacterization of A Low-Cost Optical Flow Sensor When Using An External Laser As A Direct Illumination SourceRobert PetersonNoch keine Bewertungen
- Statistical Shape Modeling of The Left Ventricle: Myocardial Infarct Classification ChallengeDokument13 SeitenStatistical Shape Modeling of The Left Ventricle: Myocardial Infarct Classification ChallengeRobert PetersonNoch keine Bewertungen
- Optimizing Neural Networks That Generate ImagesDokument120 SeitenOptimizing Neural Networks That Generate ImagesRobert PetersonNoch keine Bewertungen
- Optimizing Neural Networks That Generate ImagesDokument120 SeitenOptimizing Neural Networks That Generate ImagesRobert PetersonNoch keine Bewertungen
- Infarct Localization From Myocardial DeformationDokument13 SeitenInfarct Localization From Myocardial DeformationRobert PetersonNoch keine Bewertungen
- 1511 06434 PDFDokument16 Seiten1511 06434 PDFTote123456789Noch keine Bewertungen
- Bimodal Assessment of Laparoscopic Suturing SkillsDokument5 SeitenBimodal Assessment of Laparoscopic Suturing SkillsRobert PetersonNoch keine Bewertungen
- Using Cine MR Images To Evaluate Myocardial Infarct Trasnmurality On Delayed Enhancement ImagesDokument4 SeitenUsing Cine MR Images To Evaluate Myocardial Infarct Trasnmurality On Delayed Enhancement ImagesRobert PetersonNoch keine Bewertungen
- A Study of Psychomotor Skills in Minimally Invasive Surgery - What Differentiates Expert and Nonexpert PerformanceDokument10 SeitenA Study of Psychomotor Skills in Minimally Invasive Surgery - What Differentiates Expert and Nonexpert PerformanceRobert PetersonNoch keine Bewertungen
- Assessment of Laparoscopic Suturing Skills of Urology Residents - A Pan-European StudyDokument9 SeitenAssessment of Laparoscopic Suturing Skills of Urology Residents - A Pan-European StudyRobert PetersonNoch keine Bewertungen
- LR1V Linear Regression with One VariableDokument3 SeitenLR1V Linear Regression with One VariableRobert PetersonNoch keine Bewertungen
- Objective Classification of Residents Based On Their Psychomotor Laparoscopic SkillsDokument9 SeitenObjective Classification of Residents Based On Their Psychomotor Laparoscopic SkillsRobert PetersonNoch keine Bewertungen
- Relevance of Motion-Related Assessment Metrics in Laparoscopic SurgeryDokument16 SeitenRelevance of Motion-Related Assessment Metrics in Laparoscopic SurgeryRobert PetersonNoch keine Bewertungen
- How To Objectively Classify Residents Based On Their Psychomotor Laparoscopic SkillsDokument11 SeitenHow To Objectively Classify Residents Based On Their Psychomotor Laparoscopic SkillsRobert PetersonNoch keine Bewertungen
- EU-rapport 'On Ageing 2015'Dokument436 SeitenEU-rapport 'On Ageing 2015'pensiontalkNoch keine Bewertungen
- Robust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Dokument8 SeitenRobust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Robert PetersonNoch keine Bewertungen
- Segmentation and Tracking The Left Ventricle by Learning The Dynamics in Cardiac ImagesDokument16 SeitenSegmentation and Tracking The Left Ventricle by Learning The Dynamics in Cardiac ImagesRobert PetersonNoch keine Bewertungen
- A Home Sleep Apnea Screening DeviceDokument9 SeitenA Home Sleep Apnea Screening DeviceRobert PetersonNoch keine Bewertungen
- Scale-Invariant Isotropy of An Optical Mouse Array For Mobile Robot Velocity EstimationDokument5 SeitenScale-Invariant Isotropy of An Optical Mouse Array For Mobile Robot Velocity EstimationRobert PetersonNoch keine Bewertungen
- Tracking DevicesDokument23 SeitenTracking DevicesRobert PetersonNoch keine Bewertungen
- The Gamer's Soul Never DiesDokument6 SeitenThe Gamer's Soul Never DiesRobert PetersonNoch keine Bewertungen
- Long Range Measurements Using A Contactless Low Cost Optical SensorDokument6 SeitenLong Range Measurements Using A Contactless Low Cost Optical SensorRobert PetersonNoch keine Bewertungen
- A Laparoscopic Surgery Training InterfaceDokument7 SeitenA Laparoscopic Surgery Training InterfaceRobert PetersonNoch keine Bewertungen
- SoM A Smart Sensor For Human Activity Monitoring and Assisted Healthy AgeingDokument8 SeitenSoM A Smart Sensor For Human Activity Monitoring and Assisted Healthy AgeingRobert PetersonNoch keine Bewertungen
- Bioelectrical Impedance Analysis-Part I Review of Principle and MethodsDokument18 SeitenBioelectrical Impedance Analysis-Part I Review of Principle and MethodslayzarleskaNoch keine Bewertungen
- Using The Image Acquisition Capabilities of The Optical Mouse Sensor To Build An Absolute Rotary EncoderDokument7 SeitenUsing The Image Acquisition Capabilities of The Optical Mouse Sensor To Build An Absolute Rotary EncoderRobert Peterson100% (1)
- Collaborative Networks Approach To Active AgeingDokument8 SeitenCollaborative Networks Approach To Active AgeingRobert PetersonNoch keine Bewertungen
- INDIAMART 25012022003631 Investor Presentation Q3FY2021-22Dokument84 SeitenINDIAMART 25012022003631 Investor Presentation Q3FY2021-22geethvazNoch keine Bewertungen
- CH06 Binding MaterialsDokument114 SeitenCH06 Binding MaterialsAbass AwalehNoch keine Bewertungen
- ZetaPlus EXT SP Series CDokument5 SeitenZetaPlus EXT SP Series Cgeorgadam1983Noch keine Bewertungen
- Batangas State University - Testing and Admission OfficeDokument2 SeitenBatangas State University - Testing and Admission OfficeDolly Manalo100% (1)
- Blasting 001 Abb WarehouseDokument2 SeitenBlasting 001 Abb WarehouseferielvpkNoch keine Bewertungen
- Oracle Fusion Middleware: CloningDokument25 SeitenOracle Fusion Middleware: CloningSwathiPatluriNoch keine Bewertungen
- VR 2200 CatalogueDokument4 SeitenVR 2200 Catalogueh.torabyNoch keine Bewertungen
- An Evaluation of Maglev Technology and Its Comparison With High Speed Rail PDFDokument20 SeitenAn Evaluation of Maglev Technology and Its Comparison With High Speed Rail PDFJohanFaqar ZainNoch keine Bewertungen
- ASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFDokument7 SeitenASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFNestor CzerwackiNoch keine Bewertungen
- Installation and Operating Instructions Gen-Key: Energy DivisionDokument22 SeitenInstallation and Operating Instructions Gen-Key: Energy DivisionAnonymous RcxX0FcNoch keine Bewertungen
- Tectonics, Vol. 8, NO. 5, PAGES 1015-1036, October 1989Dokument22 SeitenTectonics, Vol. 8, NO. 5, PAGES 1015-1036, October 1989atoinsepeNoch keine Bewertungen
- Pressure Vessel Components and MaterialsDokument30 SeitenPressure Vessel Components and MaterialsFirst UserNoch keine Bewertungen
- The Remains of The Day-Excerpts-1Dokument2 SeitenThe Remains of The Day-Excerpts-1DajanaNoch keine Bewertungen
- Sample Format PDFDokument5 SeitenSample Format PDFRhod R. AvisoNoch keine Bewertungen
- Filipino Catholic Wedding Ceremony LiturgyDokument8 SeitenFilipino Catholic Wedding Ceremony LiturgyHoney Joy ChuaNoch keine Bewertungen
- Checking battery control unitDokument3 SeitenChecking battery control unitjuanNoch keine Bewertungen
- IT Department - JdsDokument2 SeitenIT Department - JdsShahid NadeemNoch keine Bewertungen
- Odoo Video Conference User GuidesDokument12 SeitenOdoo Video Conference User GuidesZeus TitanNoch keine Bewertungen
- Hunch or Reason?: Reading File 11Dokument2 SeitenHunch or Reason?: Reading File 11georgiana dinuNoch keine Bewertungen
- ADJECTIVES ENDING IN Ing and EdDokument1 SeiteADJECTIVES ENDING IN Ing and EdRafael FloresNoch keine Bewertungen
- Vaiana Et Al (2021)Dokument11 SeitenVaiana Et Al (2021)Raffaele CapuanoNoch keine Bewertungen
- Guide To Program EVK1100 With AVR32studioDokument2 SeitenGuide To Program EVK1100 With AVR32studioRobert T. WursterNoch keine Bewertungen
- Manual Lift Release System: Parts List and DiagramsDokument4 SeitenManual Lift Release System: Parts List and DiagramsPartagon PowNoch keine Bewertungen
- MTH101 Practice Qs Solutions Lectures 1 To 22 PDFDokument50 SeitenMTH101 Practice Qs Solutions Lectures 1 To 22 PDFRubab Babar75% (4)
- SPXDokument6 SeitenSPXapi-3700460Noch keine Bewertungen
- Communication Thesis PDFDokument2 SeitenCommunication Thesis PDFBarbara0% (2)
- Baroque MusicDokument15 SeitenBaroque Musicthot777100% (2)
- Special Functions of Signal ProcessingDokument7 SeitenSpecial Functions of Signal ProcessingSaddat ShamsuddinNoch keine Bewertungen
- Symbolic Calculus Sage ReferenceDokument25 SeitenSymbolic Calculus Sage ReferenceLn Amitav BiswasNoch keine Bewertungen
- Deepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveDokument3 SeitenDeepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveThe Cultural CommitteeNoch keine Bewertungen