Das könnte Ihnen auch gefallen
- Cab&Chaissis ElectricalDokument323 SeitenCab&Chaissis Electricaltipo3331100% (13)
- Real Estate Broker ReviewerREBLEXDokument124 SeitenReal Estate Broker ReviewerREBLEXMar100% (4)
- Monte Carlo Simulations With Implementations in MATLABDokument10 SeitenMonte Carlo Simulations With Implementations in MATLABCarlos Moscoso AllelNoch keine Bewertungen
- Determining The Number of Clusters in A Data SetDokument6 SeitenDetermining The Number of Clusters in A Data Setjohn949Noch keine Bewertungen
- Learning from interest rate implied volatilitiesDokument85 SeitenLearning from interest rate implied volatilitiesbobmezzNoch keine Bewertungen
- GARCH Models in Python 1Dokument31 SeitenGARCH Models in Python 1visNoch keine Bewertungen
- An Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSDokument20 SeitenAn Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSSandeep GogadiNoch keine Bewertungen
- 16 Aap1257Dokument43 Seiten16 Aap1257Guifré Sánchez SerraNoch keine Bewertungen
- Algorithms 17 00111Dokument12 SeitenAlgorithms 17 00111jamel-shamsNoch keine Bewertungen
- 01333992Dokument4 Seiten01333992ROHIT9044782102Noch keine Bewertungen
- (VK) 25. Bayesian Node LocalisationDokument4 Seiten(VK) 25. Bayesian Node LocalisationHarshNoch keine Bewertungen
- On The Markov Chain Monte Carlo (MCMC) Method: Rajeeva L KarandikarDokument24 SeitenOn The Markov Chain Monte Carlo (MCMC) Method: Rajeeva L KarandikarDiana DilipNoch keine Bewertungen
- 214.7 (MH)Dokument6 Seiten214.7 (MH)sommukhNoch keine Bewertungen
- BréhierEtal 2016Dokument43 SeitenBréhierEtal 2016ossama123456Noch keine Bewertungen
- 10 1 1 87 2049 PDFDokument23 Seiten10 1 1 87 2049 PDFPatrick MugoNoch keine Bewertungen
- A Review of Stochastic Sampling Methods For Bayesian Inference ProblemsDokument8 SeitenA Review of Stochastic Sampling Methods For Bayesian Inference ProblemsLuis Eduardo VielmaNoch keine Bewertungen
- GirolamiDokument92 SeitenGirolamiHyacpitNoch keine Bewertungen
- A Bilevel Model of Taxation and Its Application To Optimal Pricing of Congested HighwaysDokument6 SeitenA Bilevel Model of Taxation and Its Application To Optimal Pricing of Congested HighwaysshotorbariNoch keine Bewertungen
- Poor Starting Points in Machine LearningDokument11 SeitenPoor Starting Points in Machine LearningIlija AdasjkdNoch keine Bewertungen
- A New Initialization Method For The Fuzzy C-Means Algorithm Using Fuzzy Subtractive ClusteringDokument7 SeitenA New Initialization Method For The Fuzzy C-Means Algorithm Using Fuzzy Subtractive ClusteringRizqy FahmiNoch keine Bewertungen
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniDokument8 SeitenBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderNoch keine Bewertungen
- PercolationDokument17 SeitenPercolationAbdul Karim KhanNoch keine Bewertungen
- Part 3Dokument195 SeitenPart 3Amine HadjiNoch keine Bewertungen
- 1 Introduction and Basic DenitionsDokument15 Seiten1 Introduction and Basic DenitionsamdocmNoch keine Bewertungen
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDokument4 SeitenChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsNoch keine Bewertungen
- Unit V Graphical ModelsDokument23 SeitenUnit V Graphical ModelsIndumathy ParanthamanNoch keine Bewertungen
- Markov Chain Monte Carlo and Variational Inference: Bridging The GapDokument9 SeitenMarkov Chain Monte Carlo and Variational Inference: Bridging The GapnothardNoch keine Bewertungen
- Robustness in Markov Decision Problems With Uncertain Transition MatricesDokument8 SeitenRobustness in Markov Decision Problems With Uncertain Transition MatricesHet PatelNoch keine Bewertungen
- Coin Flipping in Dynamic Programming Is Almost Useless: Stasys JuknaDokument26 SeitenCoin Flipping in Dynamic Programming Is Almost Useless: Stasys JuknaBanavath TarunNoch keine Bewertungen
- Dalalyan - 2017 - Theoretical Guarantees For Approximate Sampling From Smooth and Log-Concave DensitiesDokument26 SeitenDalalyan - 2017 - Theoretical Guarantees For Approximate Sampling From Smooth and Log-Concave DensitiesAlex LeviyevNoch keine Bewertungen
- SI NonlinDokument14 SeitenSI NonlinJimmy PhoenixNoch keine Bewertungen
- Algorithmica: Sorting-Based Selection Algorithms For Hypercubic NetworksDokument18 SeitenAlgorithmica: Sorting-Based Selection Algorithms For Hypercubic NetworksasddsdsaNoch keine Bewertungen
- Priority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesDokument23 SeitenPriority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesSadasada SadasadasadaNoch keine Bewertungen
- Queueing Analysis of High-Speed Multiplexers Including Long-Range Dependent Arrival ProcessesDokument8 SeitenQueueing Analysis of High-Speed Multiplexers Including Long-Range Dependent Arrival Processesysf1991Noch keine Bewertungen
- Parameter Estimation From Measurements Along Quantum TrajectoriesDokument8 SeitenParameter Estimation From Measurements Along Quantum TrajectoriesPierre SixNoch keine Bewertungen
- Reliability Analysis of Large Structural SystemsDokument5 SeitenReliability Analysis of Large Structural Systemsuamiranda3518Noch keine Bewertungen
- Estimation of Transfer Function of Continuous System From Sampled DataDokument3 SeitenEstimation of Transfer Function of Continuous System From Sampled DatatuxiboiNoch keine Bewertungen
- Backtrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractDokument9 SeitenBacktrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractslitjewsNoch keine Bewertungen
- MCMC - Markov Chain Monte Carlo: One of The Top Ten Algorithms of The 20th CenturyDokument31 SeitenMCMC - Markov Chain Monte Carlo: One of The Top Ten Algorithms of The 20th CenturyTigerHATS100% (1)
- WIREs Computational Stats - 2018 - Robert - Accelerating MCMC AlgorithmsDokument14 SeitenWIREs Computational Stats - 2018 - Robert - Accelerating MCMC AlgorithmsVincenzo PicozziNoch keine Bewertungen
- Monte Carlo Moves: For Solids Energy DeterminationDokument8 SeitenMonte Carlo Moves: For Solids Energy DeterminationIndra Prakash JhaNoch keine Bewertungen
- University of Bristol Research Report 08:16: SMCTC: Sequential Monte Carlo in C++Dokument36 SeitenUniversity of Bristol Research Report 08:16: SMCTC: Sequential Monte Carlo in C++Adam JohansenNoch keine Bewertungen
- TPWL IeeeDokument6 SeitenTPWL Ieeezhi.han1091Noch keine Bewertungen
- Dynamic Scaled Sampling For Deterministic ConstraintsDokument9 SeitenDynamic Scaled Sampling For Deterministic Constraintsfirefly9xNoch keine Bewertungen
- A Note FurierDokument10 SeitenA Note FurierAlejandro DonaireNoch keine Bewertungen
- 8f81 PDFDokument48 Seiten8f81 PDFSamuel WilsonNoch keine Bewertungen
- Stationary & Non-Stationary ProcessesDokument17 SeitenStationary & Non-Stationary ProcessesMichael MargoleseNoch keine Bewertungen
- Method of Moments Using Monte Carlo SimulationDokument27 SeitenMethod of Moments Using Monte Carlo SimulationosmargarnicaNoch keine Bewertungen
- Bayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangDokument17 SeitenBayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangOnkar BagariaNoch keine Bewertungen
- Quantum Data-Fitting: PACS Numbers: 03.67.-A, 03.67.ac, 42.50.DvDokument6 SeitenQuantum Data-Fitting: PACS Numbers: 03.67.-A, 03.67.ac, 42.50.Dvohenri100Noch keine Bewertungen
- WGL 19Dokument37 SeitenWGL 19Katherine GilberNoch keine Bewertungen
- Stein 2011 DiffFilterDokument20 SeitenStein 2011 DiffFiltersadasdasdffNoch keine Bewertungen
- Scale-based Clustering using Radial Basis Function Networks (RBFNDokument6 SeitenScale-based Clustering using Radial Basis Function Networks (RBFNMahakGoindaniNoch keine Bewertungen
- Markov Chain Monte Carlo and Gibbs Sampling ExplainedDokument24 SeitenMarkov Chain Monte Carlo and Gibbs Sampling Explainedp1muellerNoch keine Bewertungen
- On Simulating Finite Markov Chains by The Splitting and Roulette ApproachDokument3 SeitenOn Simulating Finite Markov Chains by The Splitting and Roulette Approachconti51Noch keine Bewertungen
- Some Analysis of The Knockoff Filter and Its Variants: Jiajie Chen, Anthony Hou, Thomas Y. Hou June 6, 2017Dokument25 SeitenSome Analysis of The Knockoff Filter and Its Variants: Jiajie Chen, Anthony Hou, Thomas Y. Hou June 6, 2017Anthony HouNoch keine Bewertungen
- Multibranch Forging Algorithms: Tails Switching Effect and Chain MeasuresDokument15 SeitenMultibranch Forging Algorithms: Tails Switching Effect and Chain MeasuresandruimanNoch keine Bewertungen
- Secant MethodDokument4 SeitenSecant MethodRavinder SinghNoch keine Bewertungen
- MCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionDokument16 SeitenMCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionChunyi WangNoch keine Bewertungen
- Well-Defined Stochastic Petri NetsDokument7 SeitenWell-Defined Stochastic Petri NetsssfofoNoch keine Bewertungen
- C I S 2011 International Press Vol. 11, No. 3, Pp. 197-224, 2011 001Dokument28 SeitenC I S 2011 International Press Vol. 11, No. 3, Pp. 197-224, 2011 001Anh ThanhNoch keine Bewertungen
- K Nearest Neighbor Algorithm: Fundamentals and ApplicationsVon EverandK Nearest Neighbor Algorithm: Fundamentals and ApplicationsNoch keine Bewertungen
- FX Talking: Some Stark DivergenceDokument15 SeitenFX Talking: Some Stark DivergencebobmezzNoch keine Bewertungen
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Dokument19 SeitenTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNoch keine Bewertungen
- 1 Communication Classes and Irreducibility For Markov ChainsDokument8 Seiten1 Communication Classes and Irreducibility For Markov ChainsbobmezzNoch keine Bewertungen
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Dokument32 SeitenApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNoch keine Bewertungen
- A Tutorial On Principal Component AnalysisDokument12 SeitenA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNoch keine Bewertungen
- c1Dokument68 Seitenc1dey_zicoNoch keine Bewertungen
- ING Think Rates Spark Shifting GroundsDokument6 SeitenING Think Rates Spark Shifting GroundsbobmezzNoch keine Bewertungen
- The Convexity Maven: "Building A Better Volatility Mousetrap"Dokument13 SeitenThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNoch keine Bewertungen
- 4703 07 Notes PP NSPPDokument9 Seiten4703 07 Notes PP NSPPМилан МишићNoch keine Bewertungen
- 1 Discrete-Time Markov ChainsDokument7 Seiten1 Discrete-Time Markov ChainsbobmezzNoch keine Bewertungen
- 1 IEOR 4701: Continuous-Time Markov ChainsDokument22 Seiten1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNoch keine Bewertungen
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDokument26 SeitenTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNoch keine Bewertungen
- Pca Portfolio SelectionDokument18 SeitenPca Portfolio Selectionluli_kbreraNoch keine Bewertungen
- Derivatives Across Asset ClassesDokument59 SeitenDerivatives Across Asset ClassesbobmezzNoch keine Bewertungen
- A Tutorial On Principal Component AnalysisDokument12 SeitenA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNoch keine Bewertungen
- Siegel ParadoxDokument4 SeitenSiegel ParadoxbobmezzNoch keine Bewertungen
- Statistical Properties of Forward Libor RatesDokument33 SeitenStatistical Properties of Forward Libor RatesbobmezzNoch keine Bewertungen
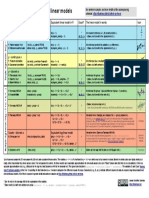
- Common Statistical Tests Are Linear ModelsDokument1 SeiteCommon Statistical Tests Are Linear ModelsbobmezzNoch keine Bewertungen
- Market Volatility BulletinDokument28 SeitenMarket Volatility BulletinbobmezzNoch keine Bewertungen
- Global Cycle Notes Hope Springs EternalDokument27 SeitenGlobal Cycle Notes Hope Springs EternalbobmezzNoch keine Bewertungen
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Dokument15 SeitenFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNoch keine Bewertungen
- Measuring cross-gamma riskDokument16 SeitenMeasuring cross-gamma riskbobmezzNoch keine Bewertungen
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDokument23 SeitenGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNoch keine Bewertungen
- Berenberg Global ForecastsDokument15 SeitenBerenberg Global ForecastsbobmezzNoch keine Bewertungen
- Gatheral 1Dokument18 SeitenGatheral 1Zhenhuan Song100% (1)
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDokument32 SeitenElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNoch keine Bewertungen
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDokument94 SeitenRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNoch keine Bewertungen
- GS Inflation Implementation 10-20Dokument20 SeitenGS Inflation Implementation 10-20bobmezzNoch keine Bewertungen
- Developing the cycle of maslahah based performance management system implementationDokument27 SeitenDeveloping the cycle of maslahah based performance management system implementationM Audito AlfansyahNoch keine Bewertungen
- CENG 5503 Intro to Steel & Timber StructuresDokument37 SeitenCENG 5503 Intro to Steel & Timber StructuresBern Moses DuachNoch keine Bewertungen
- Gabinete STS Activity1Dokument2 SeitenGabinete STS Activity1Anthony GabineteNoch keine Bewertungen
- AVR Instruction Set Addressing ModesDokument4 SeitenAVR Instruction Set Addressing ModesSundari Devi BodasinghNoch keine Bewertungen
- Dolni VestoniceDokument34 SeitenDolni VestoniceOlha PodufalovaNoch keine Bewertungen
- Paper SizeDokument22 SeitenPaper SizeAlfred Jimmy UchaNoch keine Bewertungen
- Listening Exercise 1Dokument1 SeiteListening Exercise 1Ma. Luiggie Teresita PerezNoch keine Bewertungen
- Prasads Pine Perks - Gift CardsDokument10 SeitenPrasads Pine Perks - Gift CardsSusanth Kumar100% (1)
- EA Linear RegressionDokument3 SeitenEA Linear RegressionJosh RamosNoch keine Bewertungen
- Guia de Usuario GPS Spectra SP80 PDFDokument118 SeitenGuia de Usuario GPS Spectra SP80 PDFAlbrichs BennettNoch keine Bewertungen
- Staffing Process and Job AnalysisDokument8 SeitenStaffing Process and Job AnalysisRuben Rosendal De Asis100% (1)
- LegoDokument30 SeitenLegomzai2003Noch keine Bewertungen
- Combined Set12Dokument159 SeitenCombined Set12Nguyễn Sơn LâmNoch keine Bewertungen
- Laryngeal Diseases: Laryngitis, Vocal Cord Nodules / Polyps, Carcinoma LarynxDokument52 SeitenLaryngeal Diseases: Laryngitis, Vocal Cord Nodules / Polyps, Carcinoma LarynxjialeongNoch keine Bewertungen
- Job Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaDokument45 SeitenJob Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaClaudette Clemente100% (1)
- JM Guide To ATE Flier (c2020)Dokument2 SeitenJM Guide To ATE Flier (c2020)Maged HegabNoch keine Bewertungen
- CTR Ball JointDokument19 SeitenCTR Ball JointTan JaiNoch keine Bewertungen
- CFO TagsDokument95 SeitenCFO Tagssatyagodfather0% (1)
- Seminar Course Report ON Food SafetyDokument25 SeitenSeminar Course Report ON Food SafetyYanNoch keine Bewertungen
- Link Ratio MethodDokument18 SeitenLink Ratio MethodLuis ChioNoch keine Bewertungen
- Computer Networks Transmission Media: Dr. Mohammad AdlyDokument14 SeitenComputer Networks Transmission Media: Dr. Mohammad AdlyRichthofen Flies Bf109Noch keine Bewertungen
- PEDs and InterferenceDokument28 SeitenPEDs and Interferencezakool21Noch keine Bewertungen
- Beauty ProductDokument12 SeitenBeauty ProductSrishti SoniNoch keine Bewertungen
- Evil Days of Luckless JohnDokument5 SeitenEvil Days of Luckless JohnadikressNoch keine Bewertungen
- Service Manual: Precision SeriesDokument32 SeitenService Manual: Precision SeriesMoises ShenteNoch keine Bewertungen
- C4 ISRchapterDokument16 SeitenC4 ISRchapterSerkan KalaycıNoch keine Bewertungen
- 1st SemDokument3 Seiten1st SemARUPARNA MAITYNoch keine Bewertungen
- Corporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Dokument18 SeitenCorporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Lia asnamNoch keine Bewertungen