Das könnte Ihnen auch gefallen
- Analyse Granulometrique ViergeDokument2 SeitenAnalyse Granulometrique ViergeRealmak AwaNoch keine Bewertungen
- VOILES BA-methodes Des ContraintesDokument16 SeitenVOILES BA-methodes Des ContraintesMohamed Lamrani100% (2)
- Fiche de Choix de Plateforme m1 ChimieDokument1 SeiteFiche de Choix de Plateforme m1 ChimieHamza ABBASSI100% (1)
- LP - CCT - S4 - GEL402 - Chapitre 5Dokument11 SeitenLP - CCT - S4 - GEL402 - Chapitre 5Mazama-Esso Moddoh OclooNoch keine Bewertungen
- Instruments de Mesure Et Méthodes de Test: Les IncertitudesDokument4 SeitenInstruments de Mesure Et Méthodes de Test: Les Incertitudesjunior NgoyoNoch keine Bewertungen
- Chapitre II - Les Erreurs de MesureDokument27 SeitenChapitre II - Les Erreurs de MesureSelma SenioritaNoch keine Bewertungen
- Chapitre IIIDokument41 SeitenChapitre IIIFatiha BazharNoch keine Bewertungen
- Chapitre II - Caractéristiques Métrologiques Des CapteursDokument5 SeitenChapitre II - Caractéristiques Métrologiques Des Capteursdwe merNoch keine Bewertungen
- 54211800735Dokument2 Seiten54211800735Yann AdouNoch keine Bewertungen
- Exercices Corrigés Capteurs Et InstrumentationDokument48 SeitenExercices Corrigés Capteurs Et Instrumentationazdin halmi100% (10)
- Technology Consulting - by SlidesgoDokument19 SeitenTechnology Consulting - by Slidesgokihal zohirNoch keine Bewertungen
- Exam 2017Dokument2 SeitenExam 2017Oumixa BenNoch keine Bewertungen
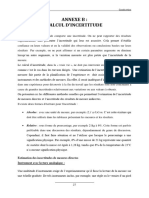
- Annexe 2 Calcul IncertitudeDokument3 SeitenAnnexe 2 Calcul IncertitudebayazidyakoubiNoch keine Bewertungen
- 31 AutoCaptDokument44 Seiten31 AutoCaptJBNoch keine Bewertungen
- Les Erreurs Et Incertitudes de MesuresDokument10 SeitenLes Erreurs Et Incertitudes de MesuresPatrick ntambueNoch keine Bewertungen
- Cours Les Appareils de Mesure GRETADokument26 SeitenCours Les Appareils de Mesure GRETAoriande2Noch keine Bewertungen
- Chapitre 2 Erreurs MesuresDokument9 SeitenChapitre 2 Erreurs MesuresyayaNoch keine Bewertungen
- Exercices Corriges Capteurs Et InstrumentationDokument46 SeitenExercices Corriges Capteurs Et InstrumentationhahadaNoch keine Bewertungen
- 38 01 Metrologie - GeneralitesDokument5 Seiten38 01 Metrologie - GeneralitesAbderrazak Miassar0% (1)
- EXTRAIT 1 de Cours 1Dokument55 SeitenEXTRAIT 1 de Cours 1Alaz FofanaNoch keine Bewertungen
- LP Gim - Metrologie - Caracteristiques MetrologiquesDokument10 SeitenLP Gim - Metrologie - Caracteristiques MetrologiquesTECHNOLOGIES MODERNES DU CAMEROUNNoch keine Bewertungen
- Scéance 1 InstrumentationDokument24 SeitenScéance 1 InstrumentationsciencetezeNoch keine Bewertungen
- CapteursDokument4 SeitenCapteursLemin Balla CherifNoch keine Bewertungen
- Initiation Du TPDokument10 SeitenInitiation Du TPmedNoch keine Bewertungen
- INTRODUCTIONDokument13 SeitenINTRODUCTIONHabiby AgeNoch keine Bewertungen
- Chapitre 3Dokument10 SeitenChapitre 3Anonymous X4KQQi100% (1)
- A Evaluation Des Connaissances Du Cours Exercice 1Dokument2 SeitenA Evaluation Des Connaissances Du Cours Exercice 1axelNoch keine Bewertungen
- Étalonnage D'un AmpèremètreDokument24 SeitenÉtalonnage D'un AmpèremètreAmil Dhaf100% (1)
- Estimation IncertitudesDokument35 SeitenEstimation IncertitudesBacem Chaabane100% (1)
- Chapitre2 Mesure&instrumentation 2023Dokument32 SeitenChapitre2 Mesure&instrumentation 2023homrichayma641Noch keine Bewertungen
- Les Erreurs de MesureDokument6 SeitenLes Erreurs de MesureHyacinthe KossiNoch keine Bewertungen
- Instrum CapteurDokument25 SeitenInstrum Capteurcélia ferNoch keine Bewertungen
- Chapitre 01 - Generalité Sur Capteur Conditionneur Metrologie Ver01Dokument17 SeitenChapitre 01 - Generalité Sur Capteur Conditionneur Metrologie Ver01miss khan100% (1)
- TPMesure 1Dokument9 SeitenTPMesure 1Mouhamadou Ndoucoumane MBENGUENoch keine Bewertungen
- Chap 3Dokument23 SeitenChap 3Yasser GhrabNoch keine Bewertungen
- Ch2appareils de MesureDokument17 SeitenCh2appareils de MesureokherfaneNoch keine Bewertungen
- Généralités Sur Les Mesures Cours M GbedemaDokument6 SeitenGénéralités Sur Les Mesures Cours M GbedemaCharles GbedemaNoch keine Bewertungen
- Cours D' Electrométrie - 1Dokument20 SeitenCours D' Electrométrie - 1Gloire Vutya100% (1)
- Etalonnage Des Moyens de Contrôle Et Incertitude de MesureDokument3 SeitenEtalonnage Des Moyens de Contrôle Et Incertitude de MesuretechnoNoch keine Bewertungen
- KhaledDokument16 SeitenKhaledKhaled BouzidiNoch keine Bewertungen
- 1.0 Généralités Sur Les Capteurs DDokument8 Seiten1.0 Généralités Sur Les Capteurs DzayiNoch keine Bewertungen
- Document 1 InformatiqueDokument10 SeitenDocument 1 InformatiqueAnaïs CharroinNoch keine Bewertungen
- TP 1 Mesures Et IncertitudesDokument4 SeitenTP 1 Mesures Et IncertitudesLemrabett HabibNoch keine Bewertungen
- Utilisation D'un MultimètreDokument5 SeitenUtilisation D'un MultimètreMartial SOMENoch keine Bewertungen
- Mesure de ResistancesDokument15 SeitenMesure de ResistancesvibilanzuziNoch keine Bewertungen
- Chapitre I Généralités Sur Les CapteursDokument5 SeitenChapitre I Généralités Sur Les CapteursRano RaniaNoch keine Bewertungen
- 2 / A Instrumentation - Régulation - Automatismes: Capteurs Et TransmetteursDokument52 Seiten2 / A Instrumentation - Régulation - Automatismes: Capteurs Et Transmetteursredwane100% (1)
- TP19 Capteur US Et StatistiquesDokument8 SeitenTP19 Capteur US Et StatistiquesAnonymous 9qKdViDP4Noch keine Bewertungen
- 10 MétrolgieDokument26 Seiten10 Métrolgiemessarahyoucef0Noch keine Bewertungen
- Chapitre 1Dokument23 SeitenChapitre 1kaddou12Noch keine Bewertungen
- Chapitre II Les Caractéristiques MétrologiquesDokument4 SeitenChapitre II Les Caractéristiques MétrologiquesRano RaniaNoch keine Bewertungen
- Capter RusDokument5 SeitenCapter RusRafik SidrouhouNoch keine Bewertungen
- 6 Instrumentation Industrielle Transmetteur PDFDokument17 Seiten6 Instrumentation Industrielle Transmetteur PDFDODOHICHAMNoch keine Bewertungen
- Capteur IntroducDokument11 SeitenCapteur IntroducBlan CooNoch keine Bewertungen
- Introduction GeneraleDokument4 SeitenIntroduction GeneraleCitoyen x14Noch keine Bewertungen
- Capteurs-Hihi - 2021 - 2022-GESI 1-3Dokument15 SeitenCapteurs-Hihi - 2021 - 2022-GESI 1-3SOHAILA LAKHALNoch keine Bewertungen
- Chapitre 1Dokument14 SeitenChapitre 1Sidali BmrNoch keine Bewertungen
- Calcul IncertitudesDokument12 SeitenCalcul IncertitudesRigby7Noch keine Bewertungen
- Détecteur de bord Canny: Dévoiler l'art de la perception visuelleVon EverandDétecteur de bord Canny: Dévoiler l'art de la perception visuelleNoch keine Bewertungen
- Filtre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifVon EverandFiltre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifNoch keine Bewertungen
- Consensus sur un échantillon aléatoire: Estimation robuste en vision par ordinateurVon EverandConsensus sur un échantillon aléatoire: Estimation robuste en vision par ordinateurNoch keine Bewertungen
- Tremblement: Dither : bruit visuel dans la vision par ordinateurVon EverandTremblement: Dither : bruit visuel dans la vision par ordinateurNoch keine Bewertungen
- CHAPITRE 1 Installation de Chantier 2016 2017Dokument4 SeitenCHAPITRE 1 Installation de Chantier 2016 2017Houcine Cool100% (1)
- Emd 2 MMC 2012Dokument2 SeitenEmd 2 MMC 2012Houcine Cool75% (4)
- Correction EMD 1 MMC 2011Dokument1 SeiteCorrection EMD 1 MMC 2011Houcine Cool100% (2)
- Emd 2 MMC 2012Dokument2 SeitenEmd 2 MMC 2012Houcine Cool75% (4)
- Utilisation in Situ Des Polymères Liquides Dans Le Génie CivDokument9 SeitenUtilisation in Situ Des Polymères Liquides Dans Le Génie CivHoucine CoolNoch keine Bewertungen
- Formulation Des Betons Dreux Gorisse 1Dokument15 SeitenFormulation Des Betons Dreux Gorisse 1Houcine Cool100% (3)
- Guide de Logiciel Sap2000 PDFDokument52 SeitenGuide de Logiciel Sap2000 PDFHoucine Cool100% (1)
- TD MDS L2 2016Dokument4 SeitenTD MDS L2 2016Houcine Cool100% (1)
- Probleme Compactage CorrigeDokument9 SeitenProbleme Compactage CorrigeHoucine Cool100% (1)
- Chapitre 02 - Coagulation Et FloculationDokument17 SeitenChapitre 02 - Coagulation Et Floculationjust ANDROID0% (1)
- Béton PDFDokument279 SeitenBéton PDFSafar Said Junior100% (1)
- 1Dokument62 Seiten1Jean HalfdansonNoch keine Bewertungen
- Osmose Osmose Inverse PDFDokument22 SeitenOsmose Osmose Inverse PDFReda NariNoch keine Bewertungen
- p1 EleveDokument14 Seitenp1 Eleveزكرياء بنحيرتNoch keine Bewertungen
- Rapport P6 2020 09Dokument25 SeitenRapport P6 2020 09Ismail BoujridaNoch keine Bewertungen
- Livre Seconde 2019Dokument86 SeitenLivre Seconde 2019www.guipelbejeanNoch keine Bewertungen
- Les 12 Principes de La Chimie VerteDokument17 SeitenLes 12 Principes de La Chimie Verteamina ennoualNoch keine Bewertungen
- Arrêté Conjoint N°2022-022 - 220921 - 112424Dokument10 SeitenArrêté Conjoint N°2022-022 - 220921 - 112424NANANoch keine Bewertungen
- Chimie 3 eDokument36 SeitenChimie 3 eDieudonné AdokoNoch keine Bewertungen
- Huiles47 FR 2008Dokument24 SeitenHuiles47 FR 2008aminos90Noch keine Bewertungen
- Aplicaicon de MacaulayDokument4 SeitenAplicaicon de MacaulayNoeliaNoch keine Bewertungen
- PRP - Cours de Chimie (1920)Dokument401 SeitenPRP - Cours de Chimie (1920)belgam2100% (1)
- Serie 3 Corrigé PDFDokument6 SeitenSerie 3 Corrigé PDFsilent_designer100% (1)
- Correction Absorption RayonnementsDokument2 SeitenCorrection Absorption Rayonnementsbienvenuetumbae3Noch keine Bewertungen
- Caractéristiques Techniques F200K ... / F200K ... Ex-II ... / F200K ... ExDokument5 SeitenCaractéristiques Techniques F200K ... / F200K ... Ex-II ... / F200K ... Exإبراهيم الزايدي الكيحلNoch keine Bewertungen
- Maths Sciences Groupement B Certificat Daptitude Professionnelle CAP Session 2017Dokument11 SeitenMaths Sciences Groupement B Certificat Daptitude Professionnelle CAP Session 2017harycoiffureNoch keine Bewertungen
- Chapitre 4Dokument24 SeitenChapitre 4romaissaNoch keine Bewertungen
- Histophysiologie Du Parodonte PDFDokument13 SeitenHistophysiologie Du Parodonte PDFAnas GhribNoch keine Bewertungen
- Chimie Corrige Ch0Dokument12 SeitenChimie Corrige Ch0d8rypwq548Noch keine Bewertungen
- TD Chromatographie en Phase Gazeuse de L3 ProDokument6 SeitenTD Chromatographie en Phase Gazeuse de L3 ProRicky Ranaivoson100% (5)
- Methodologie Scientifique Et Techniques DDokument67 SeitenMethodologie Scientifique Et Techniques DDr-Youcef BOUMEDIENENoch keine Bewertungen
- Ebook Agrodok3 La Conservation Des Fruits Et Des LegumesDokument94 SeitenEbook Agrodok3 La Conservation Des Fruits Et Des LegumesZanoua Mamadou KoneNoch keine Bewertungen
- Le SoudageDokument7 SeitenLe SoudageJàMàl MejorNoch keine Bewertungen
- Fascicule CoursDokument18 SeitenFascicule CoursGaniyou AdenidjiNoch keine Bewertungen
- AC Uric Spin 2Dokument1 SeiteAC Uric Spin 2Kaoueche OmarNoch keine Bewertungen