Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Fundamentals of Signal and Power Integrity PDFDokument46 SeitenFundamentals of Signal and Power Integrity PDFjaltitiNoch keine Bewertungen
- Account Statement 250820 240920 PDFDokument2 SeitenAccount Statement 250820 240920 PDFUnknown100% (1)
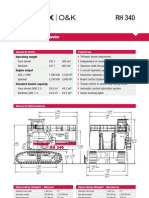
- Hydraulic Mining ExcavatorDokument8 SeitenHydraulic Mining Excavatorasditia_07100% (1)
- Exotic DVM 11 3 CompleteDokument12 SeitenExotic DVM 11 3 CompleteLuc CardNoch keine Bewertungen
- Pantalla MTA 100Dokument84 SeitenPantalla MTA 100dariocontrolNoch keine Bewertungen
- DFo 2 1Dokument15 SeitenDFo 2 1Donna HernandezNoch keine Bewertungen
- Tensegrity Beam Wave Dynamics 2019Dokument20 SeitenTensegrity Beam Wave Dynamics 2019Tensegrity WikiNoch keine Bewertungen
- Pinuad Dynamics CRCDokument62 SeitenPinuad Dynamics CRCTensegrity WikiNoch keine Bewertungen
- Marching Procedure For Tensegrity 2007Dokument26 SeitenMarching Procedure For Tensegrity 2007Tensegrity WikiNoch keine Bewertungen
- Optimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonDokument6 SeitenOptimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonTensegrity WikiNoch keine Bewertungen
- Weiwei FSN CDC42Dokument6 SeitenWeiwei FSN CDC42Tensegrity WikiNoch keine Bewertungen
- Equilibrium Conditions of A Tensegrity Structure by Williamson, Skelton, Han 2002Dokument18 SeitenEquilibrium Conditions of A Tensegrity Structure by Williamson, Skelton, Han 2002Tensegrity WikiNoch keine Bewertungen
- Han LMI Struct Linear Cdc03Dokument6 SeitenHan LMI Struct Linear Cdc03Tensegrity WikiNoch keine Bewertungen
- Tensegrity Airfoils Henrickson, Skelton, Valasek 2016Dokument25 SeitenTensegrity Airfoils Henrickson, Skelton, Valasek 2016Tensegrity WikiNoch keine Bewertungen
- Intro To Mechanics of Tensegrity StructuresDokument6 SeitenIntro To Mechanics of Tensegrity StructuresTensegrity WikiNoch keine Bewertungen
- Stiffness of Planar Tensegrity Truss Topologies by Jager, Skelton 2006Dokument23 SeitenStiffness of Planar Tensegrity Truss Topologies by Jager, Skelton 2006Tensegrity WikiNoch keine Bewertungen
- Structure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonDokument12 SeitenStructure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonTensegrity WikiNoch keine Bewertungen
- Deployment of A Class 2 Tensegrity Boom by Pinauda, Solaria, SkeltonDokument8 SeitenDeployment of A Class 2 Tensegrity Boom by Pinauda, Solaria, SkeltonTensegrity WikiNoch keine Bewertungen
- Colorfastness of Zippers To Light: Standard Test Method ForDokument2 SeitenColorfastness of Zippers To Light: Standard Test Method ForShaker QaidiNoch keine Bewertungen
- Contoh Discussion Text Tentang HomeworkDokument8 SeitenContoh Discussion Text Tentang Homeworkg3p35rs6100% (1)
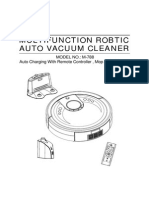
- 788 ManualDokument16 Seiten788 Manualn0rdNoch keine Bewertungen
- What Is Universe?Dokument19 SeitenWhat Is Universe?Ruben M. VerdidaNoch keine Bewertungen
- Siemens Rapidlab 248, 348, 840, 845, 850, 855, 860, 865: Reagents & ControlsDokument2 SeitenSiemens Rapidlab 248, 348, 840, 845, 850, 855, 860, 865: Reagents & ControlsJuan Carlos CrespoNoch keine Bewertungen
- Acc116 Dec 2022 - Q - Test 1Dokument6 SeitenAcc116 Dec 2022 - Q - Test 12022825274100% (1)
- Satish Gujral - FinalDokument23 SeitenSatish Gujral - Finalsatya madhuNoch keine Bewertungen
- Prospekt Puk U5 en Mail 1185Dokument8 SeitenProspekt Puk U5 en Mail 1185sakthivelNoch keine Bewertungen
- 1916 South American Championship Squads - WikipediaDokument6 Seiten1916 South American Championship Squads - WikipediaCristian VillamayorNoch keine Bewertungen
- EN 50122-1 January 2011 Corrientes RetornoDokument81 SeitenEN 50122-1 January 2011 Corrientes RetornoConrad Ziebold VanakenNoch keine Bewertungen
- CH 04Dokument19 SeitenCH 04Charmaine Bernados BrucalNoch keine Bewertungen
- Ajmera - Treon - FF - R4 - 13-11-17 FinalDokument45 SeitenAjmera - Treon - FF - R4 - 13-11-17 FinalNikita KadamNoch keine Bewertungen
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Dokument3 SeitenWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912Noch keine Bewertungen
- Binge Eating Disorder ANNADokument12 SeitenBinge Eating Disorder ANNAloloasbNoch keine Bewertungen
- 레벨 테스트Dokument2 Seiten레벨 테스트BNoch keine Bewertungen
- Blockchains: Architecture, Design and Use CasesDokument26 SeitenBlockchains: Architecture, Design and Use Caseseira kNoch keine Bewertungen
- Aditya Birla GroupDokument21 SeitenAditya Birla GroupNarendra ThummarNoch keine Bewertungen
- ThorpeDokument267 SeitenThorpezaeem73Noch keine Bewertungen
- Advertising II Marathi VersionDokument91 SeitenAdvertising II Marathi VersionHarsh Sangani100% (1)
- Battery Guide - 2021Dokument27 SeitenBattery Guide - 2021Mario LaurieNoch keine Bewertungen
- Gaming Ports MikrotikDokument6 SeitenGaming Ports MikrotikRay OhmsNoch keine Bewertungen
- SreenuDokument2 SeitenSreenuSubbareddy NvNoch keine Bewertungen
- BLP#1 - Assessment of Community Initiative (3 Files Merged)Dokument10 SeitenBLP#1 - Assessment of Community Initiative (3 Files Merged)John Gladhimer CanlasNoch keine Bewertungen
- in 30 MinutesDokument5 Seitenin 30 MinutesCésar DiazNoch keine Bewertungen