Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- MAN 7020-0145 - Uk PDFDokument99 SeitenMAN 7020-0145 - Uk PDFthis9999Noch keine Bewertungen
- Gasitaly f1 Eng ManualDokument13 SeitenGasitaly f1 Eng ManualSekson Junsukpluk50% (2)
- WRC 302-1985Dokument38 SeitenWRC 302-1985CarlosNoch keine Bewertungen
- Format WPQDokument2 SeitenFormat WPQAkash Singh TomarNoch keine Bewertungen
- SENR33120001 621E and 627E Tractor-Scraper Hydraulic System (SENR3312)Dokument2 SeitenSENR33120001 621E and 627E Tractor-Scraper Hydraulic System (SENR3312)CEVegaONoch keine Bewertungen
- Syvecs LTD: Lamborghini LP520Dokument11 SeitenSyvecs LTD: Lamborghini LP520RajibNoch keine Bewertungen
- Chain LatchesDokument2 SeitenChain Latchesdzamir203Noch keine Bewertungen
- Group Assignment 02-Advanced Structural Mechanics (TCS 6103)Dokument2 SeitenGroup Assignment 02-Advanced Structural Mechanics (TCS 6103)JimmyNoch keine Bewertungen
- DRG ListDokument272 SeitenDRG ListVijay PalNoch keine Bewertungen
- Lathe DesignDokument11 SeitenLathe DesignShiyas Basheer0% (1)
- Poster On Quantifying Atomic Vibration at Solid Liquid InterfaceDokument1 SeitePoster On Quantifying Atomic Vibration at Solid Liquid InterfaceDeep PatelNoch keine Bewertungen
- A2249 Digital Diesel Electronics Control Unit: Connector Location ViewsDokument2 SeitenA2249 Digital Diesel Electronics Control Unit: Connector Location Viewskoks_s3Noch keine Bewertungen
- Lecture 2 UpdateDokument80 SeitenLecture 2 Updateماجد مدحت سعيدNoch keine Bewertungen
- Re64555 PDFDokument12 SeitenRe64555 PDFMehdi MansourianNoch keine Bewertungen
- Screws Self-DrillingDokument22 SeitenScrews Self-DrillingSamra DukićNoch keine Bewertungen
- Quasiturbine EngineDokument16 SeitenQuasiturbine Engineapi-238832008100% (1)
- Astm C12Dokument7 SeitenAstm C12omarguillermogarzon100% (1)
- Datasheet (API 610 - 1 Page)Dokument8 SeitenDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanNoch keine Bewertungen
- IcatDokument122 SeitenIcatViraj ParmarNoch keine Bewertungen
- Air Standard CycleDokument93 SeitenAir Standard CycleJonathan CerdanNoch keine Bewertungen
- Slab Analysis of Ring Rolling AssumingConstantShearFrictionDokument7 SeitenSlab Analysis of Ring Rolling AssumingConstantShearFrictionMatteo Dalla Vecchia100% (1)
- Formation Pres TempDokument1 SeiteFormation Pres TempMahmoud Ahmed Ali Abdelrazik0% (1)
- MEC331 - Revision Gear FinalDokument9 SeitenMEC331 - Revision Gear FinalDiana PinkyNoch keine Bewertungen
- Technical Specifications For ValvesDokument32 SeitenTechnical Specifications For ValvesEr Hussain GhadialiNoch keine Bewertungen
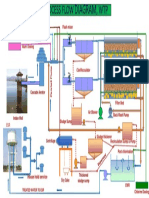
- WTP Process DiagramDokument1 SeiteWTP Process DiagramKumar AbhishekNoch keine Bewertungen
- IES Conventional Mechanical Engineering 1987Dokument7 SeitenIES Conventional Mechanical Engineering 1987eklavya koshtaNoch keine Bewertungen
- Equipment Made of 2.25 Cr-1 Mo Steel in Quenched and Tempered ConditionDokument37 SeitenEquipment Made of 2.25 Cr-1 Mo Steel in Quenched and Tempered ConditionNayibet Quintero DíazNoch keine Bewertungen
- Access - Catalog.805b.Color - DP&Casing Tools-51Dokument1 SeiteAccess - Catalog.805b.Color - DP&Casing Tools-51RICHARDNoch keine Bewertungen
- SwissDokument8 SeitenSwissRajaram RamanNoch keine Bewertungen
- Facts at Your Fingertips-201104-Hopper Inserts For Improved Solids FlowDokument1 SeiteFacts at Your Fingertips-201104-Hopper Inserts For Improved Solids Flowonizuka-t2263Noch keine Bewertungen