Das könnte Ihnen auch gefallen
- Robot NAO - Guzman AlejandroDokument15 SeitenRobot NAO - Guzman AlejandroJohnny EscandonNoch keine Bewertungen
- Scanning NetworkDokument30 SeitenScanning NetworkJohnny EscandonNoch keine Bewertungen
- Análisis MarginalDokument14 SeitenAnálisis MarginalJohnny EscandonNoch keine Bewertungen
- Antenas y Diagramas Patrones de RadiacionDokument10 SeitenAntenas y Diagramas Patrones de Radiacionmemrah2955Noch keine Bewertungen
- A Se1.2Dokument45 SeitenA Se1.2Johnny EscandonNoch keine Bewertungen
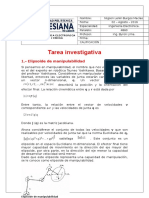
- Nigson Burgos Tarea InvestigativaDokument6 SeitenNigson Burgos Tarea InvestigativaJohnny EscandonNoch keine Bewertungen
- Procesos de Planificación de La Certificación PMP - Modulo4Dokument11 SeitenProcesos de Planificación de La Certificación PMP - Modulo4Elar Vasquez PazNoch keine Bewertungen
- Clase 2 PropagacionDokument32 SeitenClase 2 PropagacionJohnny EscandonNoch keine Bewertungen
- Tema 3Dokument16 SeitenTema 3Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- Tema 1-Introducción A La Certificación PMPDokument9 SeitenTema 1-Introducción A La Certificación PMPjose.medelNoch keine Bewertungen
- Elaboración Del Código Deontológico Del Ingeniero ElectronicoDokument3 SeitenElaboración Del Código Deontológico Del Ingeniero ElectronicoJohnny EscandonNoch keine Bewertungen
- Gestion 2Dokument47 SeitenGestion 2Johnny EscandonNoch keine Bewertungen
- 01 1. Configuracion Básica de Un Router P47Dokument34 Seiten01 1. Configuracion Básica de Un Router P47Johnny EscandonNoch keine Bewertungen
- Admi ProyectosDokument26 SeitenAdmi ProyectosJohnny EscandonNoch keine Bewertungen
- Tema 2Dokument8 SeitenTema 2Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- Tema 2Dokument8 SeitenTema 2Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- Calculo de VLSM y Diseño de Direccionamiento BásicosDokument19 SeitenCalculo de VLSM y Diseño de Direccionamiento BásicosJohnny EscandonNoch keine Bewertungen
- Dinámica Del RobotDokument66 SeitenDinámica Del RobotJohnny EscandonNoch keine Bewertungen
- A IntroducciónDokument89 SeitenA IntroducciónJohnny EscandonNoch keine Bewertungen
- Clase 3 - AUT-II - 2T - U PDFDokument31 SeitenClase 3 - AUT-II - 2T - U PDFJohnny EscandonNoch keine Bewertungen
- Capítulo # 5 - Fibra Öptica (2)Dokument38 SeitenCapítulo # 5 - Fibra Öptica (2)Johnny EscandonNoch keine Bewertungen
- Clase 5 Auto-II 2t-UDokument48 SeitenClase 5 Auto-II 2t-UJohnny EscandonNoch keine Bewertungen
- 3 Ecuaciones de BernoulliDokument5 Seiten3 Ecuaciones de BernoulliJohnny EscandonNoch keine Bewertungen
- 3.1 Configuración de SwitchesDokument43 Seiten3.1 Configuración de SwitchesJohnny EscandonNoch keine Bewertungen
- Comunicaciones Capitulo ViDokument53 SeitenComunicaciones Capitulo ViJohnny EscandonNoch keine Bewertungen
- 2 Ecuaciones Diferenciales ExactasDokument9 Seiten2 Ecuaciones Diferenciales ExactasJohnny EscandonNoch keine Bewertungen
- Deber #4Dokument7 SeitenDeber #4Johnny EscandonNoch keine Bewertungen
- Expo Potencia2Dokument18 SeitenExpo Potencia2Johnny EscandonNoch keine Bewertungen
- Teoria TallerDokument8 SeitenTeoria TallerJohnny EscandonNoch keine Bewertungen
- MD5075x PDFDokument2 SeitenMD5075x PDFMarco CornelioNoch keine Bewertungen
- Unidad 03Dokument31 SeitenUnidad 03David ZacariasNoch keine Bewertungen
- Multimetro Analogico-TransparenciasDokument10 SeitenMultimetro Analogico-TransparenciasJose TrianoNoch keine Bewertungen
- Preparatorio 1Dokument5 SeitenPreparatorio 1DariusNoch keine Bewertungen
- Informe 5Dokument10 SeitenInforme 5ABRAHAM CASO TORRESNoch keine Bewertungen
- Mantenimiento preventivo de motores eléctricosDokument10 SeitenMantenimiento preventivo de motores eléctricosEDUAR EDGARDO RAMOS TAPIAS100% (2)
- Válvulas de procesamiento de señal Parte IIDokument26 SeitenVálvulas de procesamiento de señal Parte IIYisusNoch keine Bewertungen
- Itv2022 090fubDokument1 SeiteItv2022 090fubSamuel Mur BonifacioNoch keine Bewertungen
- Control automático de temperatura para el Hub del Telepuerto SICOMIDokument75 SeitenControl automático de temperatura para el Hub del Telepuerto SICOMISamuel CalleNoch keine Bewertungen
- Clasificación de MecanismosDokument91 SeitenClasificación de MecanismosDiego Armando MtzNoch keine Bewertungen
- Proceso de Elaboración de Roscas Internas y ExternasDokument6 SeitenProceso de Elaboración de Roscas Internas y ExternasKerliziita Naula33% (3)
- TrabajoAlturaDokument29 SeitenTrabajoAlturaLula GarciaNoch keine Bewertungen
- Motor - FrandieselDokument23 SeitenMotor - FrandieselCARLOS SALGADONoch keine Bewertungen
- CT25 - Guia de UsuarioDokument139 SeitenCT25 - Guia de UsuarioAbelardo LópezNoch keine Bewertungen
- El Procesador en InformaticaDokument4 SeitenEl Procesador en InformaticahomarcitoNoch keine Bewertungen
- Transistores BipolaresDokument4 SeitenTransistores BipolaresCarlos A. BanegasNoch keine Bewertungen
- Mantenimiento bombas hidráulicasDokument51 SeitenMantenimiento bombas hidráulicasKin GreenwichNoch keine Bewertungen
- Torre Luminaria RL412-4459Dokument4 SeitenTorre Luminaria RL412-4459Ringel Damian QuiñonesNoch keine Bewertungen
- Reporte de Trabajo Del Señor Milton AñezDokument3 SeitenReporte de Trabajo Del Señor Milton Añezricardomanuel58Noch keine Bewertungen
- Manual de Garantia y Mantenimiento Benelli 502C Marzo 2022Dokument67 SeitenManual de Garantia y Mantenimiento Benelli 502C Marzo 2022Yulexy RegoNoch keine Bewertungen
- Presupuesto urbanización Alameda SalaverryDokument86 SeitenPresupuesto urbanización Alameda SalaverryKarol Sotomayor GonzalesNoch keine Bewertungen
- Ficha Tecnica HORNO D56Dokument1 SeiteFicha Tecnica HORNO D56mtto cgNoch keine Bewertungen
- Máquinas de Corriente Continua: Guía CompletaDokument29 SeitenMáquinas de Corriente Continua: Guía CompletaAlejandro MaldonadoNoch keine Bewertungen
- El GalvanometroDokument42 SeitenEl GalvanometroJhalmar JaramilloNoch keine Bewertungen
- Guía HERRAMIENTAS PARA EL ENSAMBLE Y MANTENIMIENTO DE COMPUTADORESDokument19 SeitenGuía HERRAMIENTAS PARA EL ENSAMBLE Y MANTENIMIENTO DE COMPUTADORESalfonsoNoch keine Bewertungen
- Informe 3Dokument7 SeitenInforme 3Andrés Valverde RiveraNoch keine Bewertungen
- Clase 3 Arquitectura de Computadores PDFDokument42 SeitenClase 3 Arquitectura de Computadores PDFIsra VivancoNoch keine Bewertungen
- Definición de trayectorias de herramienta y lenguajes de programación CNCDokument12 SeitenDefinición de trayectorias de herramienta y lenguajes de programación CNCRaptor 72Noch keine Bewertungen
- Simulación de Curvas Caracteristicas SCR, TRIAC, DiacDokument3 SeitenSimulación de Curvas Caracteristicas SCR, TRIAC, DiacDianaNoch keine Bewertungen
- Bases ElectronicaDokument5 SeitenBases ElectronicaYohn MartNoch keine Bewertungen