Das könnte Ihnen auch gefallen
- m01 02 Energy Methods in Structural Analysis Principle of Superposition Strain EnergyDokument21 Seitenm01 02 Energy Methods in Structural Analysis Principle of Superposition Strain EnergyhorressNoch keine Bewertungen
- CH 10Dokument36 SeitenCH 10LeonardoMadeira11100% (1)
- CH10Dokument39 SeitenCH10Ajay Kumar SreeramaNoch keine Bewertungen
- Work and Energy PrinciplesDokument12 SeitenWork and Energy PrinciplesHernan Kennedy Ricaldi PorrasNoch keine Bewertungen
- Structural Analysis R19 - UNIT-1 (Ref-2)Dokument56 SeitenStructural Analysis R19 - UNIT-1 (Ref-2)SushNoch keine Bewertungen
- Unit 10 Strain Energy: StructureDokument21 SeitenUnit 10 Strain Energy: StructureRiddhima MukherjeeNoch keine Bewertungen
- Analysis of Truss-Cable StructuresDokument9 SeitenAnalysis of Truss-Cable StructuresKtk ZadNoch keine Bewertungen
- Chapter 3 - Strain Energy MethodsDokument35 SeitenChapter 3 - Strain Energy MethodsPAULUS MAONGONoch keine Bewertungen
- Structural AnalysisDokument220 SeitenStructural AnalysisMohamedSajeerMNoch keine Bewertungen
- RDM4 C ch4 BucklingDokument17 SeitenRDM4 C ch4 BucklingThomas BernardNoch keine Bewertungen
- BunkclassDokument7 SeitenBunkclassSourabh DholeNoch keine Bewertungen
- Beam Stiffness ExamplesDokument11 SeitenBeam Stiffness ExamplesShaikh FarhanNoch keine Bewertungen
- Theories of Elastic FailureDokument15 SeitenTheories of Elastic FailurejaishowNoch keine Bewertungen
- Dynamics - Lecture TwoDokument22 SeitenDynamics - Lecture TwoKassimNoch keine Bewertungen
- 11-Stability of ColumnsDokument41 Seiten11-Stability of Columnsali381Noch keine Bewertungen
- Test Structural AnalysisDokument69 SeitenTest Structural AnalysisjaffnaNoch keine Bewertungen
- Energy Methods in Structural AnalysisDokument25 SeitenEnergy Methods in Structural AnalysisSougata DasNoch keine Bewertungen
- Classical Structural Analysis MethodsDokument291 SeitenClassical Structural Analysis MethodspairilioNoch keine Bewertungen
- 500 Matrix Force MethodDokument19 Seiten500 Matrix Force MethodSarah SullivanNoch keine Bewertungen
- Principle of Virtual Work for Pin-Jointed FramesDokument14 SeitenPrinciple of Virtual Work for Pin-Jointed FramesEmmanuel JustinNoch keine Bewertungen
- Beam Deflection Calculation MethodsDokument11 SeitenBeam Deflection Calculation MethodshariNoch keine Bewertungen
- Stress Analysis in Elastic Bending Beams and Thick Hollow CylindersDokument6 SeitenStress Analysis in Elastic Bending Beams and Thick Hollow Cylindersمحمد فطري فيك نظامNoch keine Bewertungen
- Unit 8 Strain Energy: StructureDokument24 SeitenUnit 8 Strain Energy: StructureSubhash KorumilliNoch keine Bewertungen
- Dynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural DynamicsDokument11 SeitenDynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural Dynamicspanos2244662864Noch keine Bewertungen
- Cse30301 3 2015Dokument57 SeitenCse30301 3 2015王嵐Noch keine Bewertungen
- Three Moment Equation PaperDokument9 SeitenThree Moment Equation PaperAkash SoodNoch keine Bewertungen
- Practical Application of Energy Methods To Structural Stability Problems PDFDokument9 SeitenPractical Application of Energy Methods To Structural Stability Problems PDFGonzalo AbarcaNoch keine Bewertungen
- Castigliano's TheoremDokument13 SeitenCastigliano's TheoremSkektNoch keine Bewertungen
- Strength of Material- II Lecture Note by Balemlay a.Dokument71 SeitenStrength of Material- II Lecture Note by Balemlay a.Degsew MesafintNoch keine Bewertungen
- Strain Energy and Impact LoadingDokument12 SeitenStrain Energy and Impact LoadingAhmed Magdy100% (1)
- PDF Dynamic Analysis of StructuresDokument43 SeitenPDF Dynamic Analysis of StructuresChegue BureNoch keine Bewertungen
- Strain EnergyDokument24 SeitenStrain EnergyAlam Mohammad Parvez SaifiNoch keine Bewertungen
- Macaulay's Method 1011Dokument108 SeitenMacaulay's Method 1011Medha KapoorNoch keine Bewertungen
- LectureDokument8 SeitenLectureRohit PareekNoch keine Bewertungen
- Statics of Structure inDokument31 SeitenStatics of Structure inSelino CruzNoch keine Bewertungen
- Energy MethodsDokument15 SeitenEnergy MethodsgalehNoch keine Bewertungen
- T Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsDokument6 SeitenT Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsMelvin EsguerraNoch keine Bewertungen
- Applications of Energy Methods: - Principle of Stationary Potential Energy - Castigliano's TheoremDokument33 SeitenApplications of Energy Methods: - Principle of Stationary Potential Energy - Castigliano's TheoremSaurabh PednekarNoch keine Bewertungen
- Indirect Model StudyDokument7 SeitenIndirect Model Studyvennila-puviNoch keine Bewertungen
- Ce 1252 - Strength of Materials: Two Mark Question & AnswersDokument23 SeitenCe 1252 - Strength of Materials: Two Mark Question & Answerslogeshboy007Noch keine Bewertungen
- 2 Marks Questions With AnswersDokument16 Seiten2 Marks Questions With AnswersSrijaJuluruNoch keine Bewertungen
- Energy theorems stationarity conditionsDokument8 SeitenEnergy theorems stationarity conditionsdearsaswatNoch keine Bewertungen
- Fig. 1 Alternate States of Equilibrium: (A) For Straight Axially-Loaded Column and (B) ForDokument4 SeitenFig. 1 Alternate States of Equilibrium: (A) For Straight Axially-Loaded Column and (B) Forashok paulNoch keine Bewertungen
- Deflection of Beams PDFDokument28 SeitenDeflection of Beams PDFBrave Hlulani MabasoNoch keine Bewertungen
- Structural Analysis R19 - UNIT-1Dokument50 SeitenStructural Analysis R19 - UNIT-1sainadh upputhollaNoch keine Bewertungen
- Learning Module: College of Engineering and Information TechnologyDokument21 SeitenLearning Module: College of Engineering and Information TechnologyMatet MaglipacNoch keine Bewertungen
- Ce 1252 - Strength of Materials: Two Mark Question & AnswersDokument21 SeitenCe 1252 - Strength of Materials: Two Mark Question & AnswerskumarNoch keine Bewertungen
- Beams and Framed Structures: Structures and Solid Body MechanicsVon EverandBeams and Framed Structures: Structures and Solid Body MechanicsBewertung: 3 von 5 Sternen3/5 (2)
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsVon EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNoch keine Bewertungen
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionVon EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionBewertung: 2.5 von 5 Sternen2.5/5 (4)
- Hardware Required:: Circuit Diagram & Model On The Project BoardDokument1 SeiteHardware Required:: Circuit Diagram & Model On The Project BoardJaneshaNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
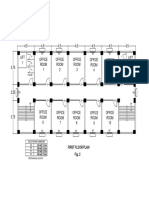
- First floor plan dimensions under 40 charactersDokument1 SeiteFirst floor plan dimensions under 40 charactersJaneshaNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Dengue PreventionDokument30 SeitenDengue PreventionJaneshaNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- Refund Rules Wef 12-Nov-15Dokument11 SeitenRefund Rules Wef 12-Nov-15jamesNoch keine Bewertungen
- List of Indian StandardsDokument27 SeitenList of Indian StandardsrockyminNoch keine Bewertungen
- Consultation Application FormDokument1 SeiteConsultation Application FormJaneshaNoch keine Bewertungen
- Consultation Application Form PDFDokument1 SeiteConsultation Application Form PDFJaneshaNoch keine Bewertungen
- List of Indian StandardsDokument27 SeitenList of Indian StandardsrockyminNoch keine Bewertungen
- Beam Design Formulas With Shear and MomentDokument20 SeitenBeam Design Formulas With Shear and MomentMuhammad Saqib Abrar100% (8)
- Consultation Application Form: Paste Customer'S Photograph HereDokument1 SeiteConsultation Application Form: Paste Customer'S Photograph HereJaneshaNoch keine Bewertungen
- Building PlanDokument1 SeiteBuilding PlanJaneshaNoch keine Bewertungen
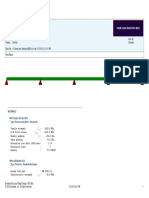
- BM SF EquationsDokument2 SeitenBM SF EquationsJaneshaNoch keine Bewertungen
- List of Indian StandardsDokument27 SeitenList of Indian StandardsrockyminNoch keine Bewertungen
- List of Indian StandardsDokument27 SeitenList of Indian StandardsrockyminNoch keine Bewertungen
- List of Indian StandardsDokument27 SeitenList of Indian StandardsrockyminNoch keine Bewertungen
- Indian StandardDokument20 SeitenIndian Standardamoudi101100% (1)
- Spark-Plug Faces: 2009 - 2010 Bosch Automotive AftermarketDokument1 SeiteSpark-Plug Faces: 2009 - 2010 Bosch Automotive AftermarketZamriNoch keine Bewertungen
- Method of Painting WorksDokument43 SeitenMethod of Painting WorksIkram Syed50% (2)
- Standard Packing Guideline JICADokument146 SeitenStandard Packing Guideline JICAYul Aryono S.Noch keine Bewertungen
- Ppap 201300152Dokument13 SeitenPpap 201300152Rose Bonilla PeregrinoNoch keine Bewertungen
- En 13445-5-2018 CNDDokument2 SeitenEn 13445-5-2018 CNDDaniele CrescimbeniNoch keine Bewertungen
- 1.PH8151 Model Exam-I QPDokument12 Seiten1.PH8151 Model Exam-I QPKalirajanNoch keine Bewertungen
- MSDS SUN&RAIN ELASTOMERIC ColoredDokument3 SeitenMSDS SUN&RAIN ELASTOMERIC ColoredLola Tesie0% (1)
- U Beam PDFDokument114 SeitenU Beam PDFKS&TAN sdn bhdNoch keine Bewertungen
- Zamac-5 Is ZDC-1Dokument1 SeiteZamac-5 Is ZDC-1atul sachanNoch keine Bewertungen
- LT Buckling Beam Design - Simple Method - 2upDokument5 SeitenLT Buckling Beam Design - Simple Method - 2upberto2008Noch keine Bewertungen
- Ecocure 17: Water-Based Curing Compound For Industrial Concrete FloorsDokument1 SeiteEcocure 17: Water-Based Curing Compound For Industrial Concrete FloorsjaimeNoch keine Bewertungen
- Tie BarDokument1 SeiteTie BarTejas ManeNoch keine Bewertungen
- Product Catalogue 9 - Page 8 EJAFNDokument1 SeiteProduct Catalogue 9 - Page 8 EJAFNAndrei Ionut UtaNoch keine Bewertungen
- Waterborne Polyvinyl Acetate Moisture Resistant AdhesiveDokument1 SeiteWaterborne Polyvinyl Acetate Moisture Resistant AdhesiveFacundo SepulvedaNoch keine Bewertungen
- Preview Lesson StarterDokument9 SeitenPreview Lesson StarterKim JalmNoch keine Bewertungen
- A 153 Standared Specification Hot Dip Galvanized PDFDokument4 SeitenA 153 Standared Specification Hot Dip Galvanized PDFAhmed AwwadNoch keine Bewertungen
- Worksheet: General Physics 2Dokument8 SeitenWorksheet: General Physics 2Abdul Raffih AdapunNoch keine Bewertungen
- Construction Guwahati Railway Colony Namghar, Panbaza, Guwahati-1Dokument5 SeitenConstruction Guwahati Railway Colony Namghar, Panbaza, Guwahati-1Achinta_b11Noch keine Bewertungen
- W&A Hollowcore PanelsDokument2 SeitenW&A Hollowcore PanelsWhite RabbitNoch keine Bewertungen
- EUR23252ENDokument108 SeitenEUR23252ENMohamed Abbas BissoNoch keine Bewertungen
- PP Copolimero - Lloyndellbasell Adstif Ea648pDokument1 SeitePP Copolimero - Lloyndellbasell Adstif Ea648parmandoNoch keine Bewertungen
- Bulk Reducing vs. Bulk Gaining Industries: Chapter 11-Key Issue #2 Why Are Situation Factors Important?Dokument11 SeitenBulk Reducing vs. Bulk Gaining Industries: Chapter 11-Key Issue #2 Why Are Situation Factors Important?Prakriti AdhikariNoch keine Bewertungen
- St-Hidd-01 Security Room DetailsDokument1 SeiteSt-Hidd-01 Security Room Detailsmhazarath murariNoch keine Bewertungen
- Technical Review of Steel Relaxation Testing MachinesDokument3 SeitenTechnical Review of Steel Relaxation Testing Machinesjerin sam kurianNoch keine Bewertungen
- SKF LGMT-2 Data SheetDokument2 SeitenSKF LGMT-2 Data SheetRahul SharmaNoch keine Bewertungen
- CX Field Target Arrow Shaft GuideDokument6 SeitenCX Field Target Arrow Shaft GuideMat FraboNoch keine Bewertungen
- Glass EssayDokument2 SeitenGlass EssayJESUS is My GODNoch keine Bewertungen
- False & Types of FlooringDokument30 SeitenFalse & Types of Flooringpurvakul10100% (1)
- Design of Biomethanation Plant and Composting PlantDokument23 SeitenDesign of Biomethanation Plant and Composting PlantVaishaliNoch keine Bewertungen
- Auditing a Printed Circuit Board Fabrication FacilityDokument6 SeitenAuditing a Printed Circuit Board Fabrication FacilityRassiel DiazNoch keine Bewertungen