Das könnte Ihnen auch gefallen
- Foundation Course for Advanced Computer StudiesVon EverandFoundation Course for Advanced Computer StudiesNoch keine Bewertungen
- SS BLT 300manualDokument18 SeitenSS BLT 300manualYogesh KhollamNoch keine Bewertungen
- CUPS Printing in Linux UNIX For Intermec Printers Tech BriefDokument4 SeitenCUPS Printing in Linux UNIX For Intermec Printers Tech Briefj2448910Noch keine Bewertungen
- Lecture #6: Assembler: From Nand To TetrisDokument24 SeitenLecture #6: Assembler: From Nand To TetrisHunter HaggardNoch keine Bewertungen
- Stepper Motor Control Using The PIC16F684Dokument12 SeitenStepper Motor Control Using The PIC16F684edward_conzaNoch keine Bewertungen
- Robotics Series Catalog PDFDokument4 SeitenRobotics Series Catalog PDFWahYu Redha PutraNoch keine Bewertungen
- Skype ArchitectureDokument4 SeitenSkype ArchitectureEditorClasikHits100% (1)
- Debian Server BookDokument147 SeitenDebian Server BookhellfireNoch keine Bewertungen
- Handouts PDFDokument97 SeitenHandouts PDFAnonymous GEHYDGYVdNoch keine Bewertungen
- Node Vol 01Dokument152 SeitenNode Vol 01Guilherme JungNoch keine Bewertungen
- G-Code For CNC MachineDokument13 SeitenG-Code For CNC MachinezokiplusNoch keine Bewertungen
- Neural Networks DocumentationDokument406 SeitenNeural Networks DocumentationManh Lam LeNoch keine Bewertungen
- Visual Studio IDE TutorialDokument64 SeitenVisual Studio IDE TutorialJigneshNoch keine Bewertungen
- How To Build Your Own Social Media Monitoring Service - Marshall Sponder - Webmetricsguru - Dot - Com - 3!31!2010 - V2Dokument173 SeitenHow To Build Your Own Social Media Monitoring Service - Marshall Sponder - Webmetricsguru - Dot - Com - 3!31!2010 - V2Webmetricsguru100% (1)
- VPN Setup GuideDokument22 SeitenVPN Setup GuideamelchorNoch keine Bewertungen
- Bluetooth Technology: E-Mail: Prakasamengineeringcollege@yahoo - Co.inDokument12 SeitenBluetooth Technology: E-Mail: Prakasamengineeringcollege@yahoo - Co.indumbijoalNoch keine Bewertungen
- 1701ad Gold ManualDokument32 Seiten1701ad Gold ManualSingensaiNoch keine Bewertungen
- MLLecture 1Dokument10 SeitenMLLecture 1FizaAKNoch keine Bewertungen
- Android (operating system) A Clear and Concise ReferenceVon EverandAndroid (operating system) A Clear and Concise ReferenceNoch keine Bewertungen
- CNC G-Code and M-Code Reference List For CNC MillsDokument5 SeitenCNC G-Code and M-Code Reference List For CNC Millssangu1434Noch keine Bewertungen
- 25 Useful Arduino Shields That You Might Need To Get - Random Nerd TutorialsDokument30 Seiten25 Useful Arduino Shields That You Might Need To Get - Random Nerd TutorialsRadismel Salazar FudichelisNoch keine Bewertungen
- SDN Controller and Implementation PDFDokument63 SeitenSDN Controller and Implementation PDFhadje benilhaNoch keine Bewertungen
- ICEpdf Developers GuideDokument82 SeitenICEpdf Developers Guideblackmatrix2007Noch keine Bewertungen
- Arduino - InterruptsDokument58 SeitenArduino - Interrupts18018022 I Made Ngurah Chandra Marutha100% (1)
- Bipolar Stepper Motor Driver 74194Dokument12 SeitenBipolar Stepper Motor Driver 74194mekuannintmesfin100% (2)
- Wireless Sensor Network and Contiky OSDokument144 SeitenWireless Sensor Network and Contiky OSMichel Zarzosa RojasNoch keine Bewertungen
- Command PromptDokument8 SeitenCommand PromptNirav Patel100% (2)
- Bluetooth PiconetDokument25 SeitenBluetooth PiconetAbhishek SkNoch keine Bewertungen
- Arduino Nano3Dokument7 SeitenArduino Nano3Victor Castro100% (1)
- Software Defined Networking (SDN) : Marco - Cello@unige - ItDokument50 SeitenSoftware Defined Networking (SDN) : Marco - Cello@unige - ItPilar AlessandraNoch keine Bewertungen
- Hands On Contiki OS and Cooja Simulator: Exercises (Part II)Dokument15 SeitenHands On Contiki OS and Cooja Simulator: Exercises (Part II)Vassilios KotsiouNoch keine Bewertungen
- About Software ToolsDokument40 SeitenAbout Software ToolsFurqon Madaz XskaMaticNoch keine Bewertungen
- GAWK: E Ective AWK ProgrammingDokument351 SeitenGAWK: E Ective AWK ProgramminginfobitsNoch keine Bewertungen
- Gyro Camera For Motorcycle Using ArduinoDokument8 SeitenGyro Camera For Motorcycle Using ArduinoCUIDAITONoch keine Bewertungen
- Bluetooth Controlled Servo Motor Using ArduinoDokument12 SeitenBluetooth Controlled Servo Motor Using ArduinoMihai BogdanNoch keine Bewertungen
- PDMS AutoDRAFT User Guide PDFDokument81 SeitenPDMS AutoDRAFT User Guide PDFravichan_2010Noch keine Bewertungen
- Getting Startted With GNU Radio and USRPDokument6 SeitenGetting Startted With GNU Radio and USRPAdeel AhmadNoch keine Bewertungen
- Presentation - Pdms Draft GenerationDokument38 SeitenPresentation - Pdms Draft GenerationarcdukeNoch keine Bewertungen
- Mini Thermal Receipt PrinterDokument19 SeitenMini Thermal Receipt PrinterSandra MarkivNoch keine Bewertungen
- Twitter Zombie GroupDokument10 SeitenTwitter Zombie Groupshakes21778Noch keine Bewertungen
- 2.data Analysis With Python by Rituraj Dixit - Z-LibraryDokument4 Seiten2.data Analysis With Python by Rituraj Dixit - Z-LibraryShieeplNoch keine Bewertungen
- Porttalk Installation StepsDokument2 SeitenPorttalk Installation StepsMuhammad Zulkifly SamatNoch keine Bewertungen
- Arduino Debugger Dolinay2016Dokument4 SeitenArduino Debugger Dolinay2016peppas4643Noch keine Bewertungen
- Internet of Things ClassDokument65 SeitenInternet of Things ClassMarius DanilaNoch keine Bewertungen
- D-Bus Tutorial: Havoc PenningtonDokument19 SeitenD-Bus Tutorial: Havoc Penningtonrk1825Noch keine Bewertungen
- Analyzing CDRIPDR Data To Find People Network FromDokument6 SeitenAnalyzing CDRIPDR Data To Find People Network FromFaim HasanNoch keine Bewertungen
- Gcode GRBL ProcedureDokument4 SeitenGcode GRBL Proceduremahesh babuNoch keine Bewertungen
- Morse CodeDokument7 SeitenMorse CodeVrushali KhatpeNoch keine Bewertungen
- Datasheet OpenPiDokument8 SeitenDatasheet OpenPiSrinath KvNoch keine Bewertungen
- Advanced Debugging of STM32-Based DevicesDokument10 SeitenAdvanced Debugging of STM32-Based DevicesSandoval DanielNoch keine Bewertungen
- AbstractDokument24 SeitenAbstractVijay Kumar0% (1)
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsDokument32 SeitenWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaNoch keine Bewertungen
- 9tut TutorialsDokument119 Seiten9tut TutorialsLa Yohda Stasella100% (1)
- KiCAD A Free and Open Source EDA ToolDokument3 SeitenKiCAD A Free and Open Source EDA ToolIonela100% (2)
- Low Cost 150 Watt Amplifier CircuitDokument3 SeitenLow Cost 150 Watt Amplifier CircuitjnaguNoch keine Bewertungen
- Cpu Perf CalDokument1 SeiteCpu Perf CaljnaguNoch keine Bewertungen
- Price ListDokument22 SeitenPrice ListjnaguNoch keine Bewertungen
- How To Calculate Your LED Heat SinkDokument4 SeitenHow To Calculate Your LED Heat SinkjnaguNoch keine Bewertungen
- 2.3.4 The Ball Shall Be of A Brand and Type Currently Approved by The ITTFDokument2 Seiten2.3.4 The Ball Shall Be of A Brand and Type Currently Approved by The ITTFjnaguNoch keine Bewertungen
- DevOps Tutorial - Introduction To DevOps - EdurekaDokument10 SeitenDevOps Tutorial - Introduction To DevOps - EdurekajnaguNoch keine Bewertungen
- Keerai Benefits Part1Dokument3 SeitenKeerai Benefits Part1jnaguNoch keine Bewertungen
- Protecting Your House From Termites: Environmental Health GuideDokument6 SeitenProtecting Your House From Termites: Environmental Health GuidejnaguNoch keine Bewertungen
- Keerai BenefitsDokument3 SeitenKeerai BenefitsjnaguNoch keine Bewertungen
- Court: Racquet Sport Singles Doubles Racquet Ball CourtDokument3 SeitenCourt: Racquet Sport Singles Doubles Racquet Ball CourtjnaguNoch keine Bewertungen
- Mediclaim Insurance Policy - IndividualDokument8 SeitenMediclaim Insurance Policy - IndividualjnaguNoch keine Bewertungen
- Follow These Steps (1 To 9) To Plan Your TripDokument3 SeitenFollow These Steps (1 To 9) To Plan Your TripjnaguNoch keine Bewertungen
- ISMS Consultancy For JPKN - Project Kickoff MeetingDokument23 SeitenISMS Consultancy For JPKN - Project Kickoff Meetingjnagu50% (2)
- Security Architecture & ModelsDokument29 SeitenSecurity Architecture & ModelsjnaguNoch keine Bewertungen
- Measuring EffectivenessDokument15 SeitenMeasuring EffectivenessjnaguNoch keine Bewertungen
- Boi National Swasthya Bima: An Attractive Family Floater Health Insurance PolicyDokument1 SeiteBoi National Swasthya Bima: An Attractive Family Floater Health Insurance PolicyjnaguNoch keine Bewertungen
- Medical Coverage PlanDokument30 SeitenMedical Coverage PlanjnaguNoch keine Bewertungen
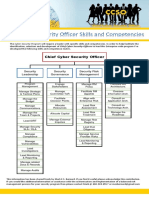
- Chief Cyber Security Officer: Security Leadership Security Governance Security Risk Management Security ArchitectureDokument1 SeiteChief Cyber Security Officer: Security Leadership Security Governance Security Risk Management Security ArchitecturejnaguNoch keine Bewertungen
- New India Top Up MediclaimDokument28 SeitenNew India Top Up MediclaimjnaguNoch keine Bewertungen
- TheBigBookOfTeamCulture PDFDokument231 SeitenTheBigBookOfTeamCulture PDFavarus100% (1)
- AromatherapyDokument15 SeitenAromatherapymurrmurreNoch keine Bewertungen
- Unit 12 BriefDokument7 SeitenUnit 12 Briefapi-477397447Noch keine Bewertungen
- 8 TH Linear Equations DBDokument1 Seite8 TH Linear Equations DBParth GoyalNoch keine Bewertungen
- Understanding PumpDokument113 SeitenUnderstanding Pumpnyr1981_942955963100% (5)
- Bulletin - February 12, 2012Dokument14 SeitenBulletin - February 12, 2012ppranckeNoch keine Bewertungen
- IAU Logbook Core 6weeksDokument7 SeitenIAU Logbook Core 6weeksbajariaaNoch keine Bewertungen
- High School Department PAASCU Accredited Academic Year 2017 - 2018Dokument6 SeitenHigh School Department PAASCU Accredited Academic Year 2017 - 2018Kevin T. OnaroNoch keine Bewertungen
- Bo Sanchez-Turtle Always Wins Bo SanchezDokument31 SeitenBo Sanchez-Turtle Always Wins Bo SanchezCristy Louela Pagapular88% (8)
- Calculating Staff Strength:: Find Latest Hospitality Resources atDokument8 SeitenCalculating Staff Strength:: Find Latest Hospitality Resources atPriyanjali SainiNoch keine Bewertungen
- Month Puzzle Two VariableDokument6 SeitenMonth Puzzle Two VariableNayan KaithwasNoch keine Bewertungen
- CrumpleZonesSE (Edit)Dokument12 SeitenCrumpleZonesSE (Edit)Dah Unknown MarksmenNoch keine Bewertungen
- Learning Theories Behaviourism, Cognitivism, Social ConstructivismDokument39 SeitenLearning Theories Behaviourism, Cognitivism, Social ConstructivismJuan Miguel100% (3)
- 5024Dokument2 Seiten5024Luis JesusNoch keine Bewertungen
- Zara Case StudyDokument26 SeitenZara Case StudySeminarskiRadovi100% (2)
- Algorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, SilverkiteDokument3 SeitenAlgorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, Silverkitesiper34606Noch keine Bewertungen
- Iso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Dokument33 SeitenIso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Tassnim Ben youssefNoch keine Bewertungen
- Differentiating Language Difference and Language Disorder - Information For Teachers Working With English Language Learners in The Schools PDFDokument23 SeitenDifferentiating Language Difference and Language Disorder - Information For Teachers Working With English Language Learners in The Schools PDFIqra HassanNoch keine Bewertungen
- Detailed Lesson Plan (DLP) Format: Learning Competency/iesDokument1 SeiteDetailed Lesson Plan (DLP) Format: Learning Competency/iesErma JalemNoch keine Bewertungen
- Faculty of AyurvedaDokument9 SeitenFaculty of AyurvedaKirankumar MutnaliNoch keine Bewertungen
- Solution Manual-Statistical Physics of Particles by Meheran KardarDokument165 SeitenSolution Manual-Statistical Physics of Particles by Meheran KardarDanielle Nguyen7% (14)
- Chapter 34 Esip For FinalDokument35 SeitenChapter 34 Esip For FinalJeaniel BorlingNoch keine Bewertungen
- NEW Sample ISAT Questions RevisedDokument14 SeitenNEW Sample ISAT Questions RevisedHa HoangNoch keine Bewertungen
- Tom Rockmore - Hegel's Circular EpistemologyDokument213 SeitenTom Rockmore - Hegel's Circular Epistemologyluiz100% (1)
- Challenges Affecting Devolution PDFDokument94 SeitenChallenges Affecting Devolution PDFELIJAH M. OMBEONoch keine Bewertungen
- KRPL Shahjahanpur Check List For Arc Welding MachineDokument1 SeiteKRPL Shahjahanpur Check List For Arc Welding MachineA S YadavNoch keine Bewertungen
- Language Loss in Waray: Ni Voltaire Q. UyzonDokument23 SeitenLanguage Loss in Waray: Ni Voltaire Q. UyzonMary Rose OmbrogNoch keine Bewertungen
- The English We SpeakDokument2 SeitenThe English We Speakcaeronmustai100% (1)
- 1991 Hanaor - DOUBLE-LAYER TENSEGRITY GRIDS - STATIC LOADDokument15 Seiten1991 Hanaor - DOUBLE-LAYER TENSEGRITY GRIDS - STATIC LOADDaniel MartinsNoch keine Bewertungen
- THE PERFECT DAY Compressed 1 PDFDokument218 SeitenTHE PERFECT DAY Compressed 1 PDFMariaNoch keine Bewertungen