Das könnte Ihnen auch gefallen
- Development of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger VehicleDokument11 SeitenDevelopment of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger Vehicleمحمد جوادNoch keine Bewertungen
- Control Strategy Development and Optimization For A Series Hydraulic Hybrid VehicleDokument7 SeitenControl Strategy Development and Optimization For A Series Hydraulic Hybrid VehicleTri-Vien VuNoch keine Bewertungen
- Optimal Control Strategies for a Series Hydraulic Hybrid VehicleDokument7 SeitenOptimal Control Strategies for a Series Hydraulic Hybrid VehicleTri-Vien VuNoch keine Bewertungen
- Combined Optimisation of Design and Power Management of The Hydraulic Hybrid Propulsion System For The 6Dokument31 SeitenCombined Optimisation of Design and Power Management of The Hydraulic Hybrid Propulsion System For The 6AlfinThariqNoch keine Bewertungen
- 10 1016-j Enconman 2013 09 003Dokument8 Seiten10 1016-j Enconman 2013 09 003Mohsen PeykaranNoch keine Bewertungen
- Drive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruiseDokument7 SeitenDrive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruisewahonotNoch keine Bewertungen
- Energy Management Strategy For A PHEVDokument6 SeitenEnergy Management Strategy For A PHEVVignesh HegdeNoch keine Bewertungen
- Energies: Optimization and Application For Hydraulic Electric Hybrid VehicleDokument17 SeitenEnergies: Optimization and Application For Hydraulic Electric Hybrid VehicleSs KalagiNoch keine Bewertungen
- Power Management Strategy for Parallel Hybrid Electric VehiclesDokument6 SeitenPower Management Strategy for Parallel Hybrid Electric VehiclesGaurav DeshmukhNoch keine Bewertungen
- Energies: Electrification of A Heavy-Duty CI Truck-Comparison of Electric Turbocharger and Crank Shaft MotorDokument21 SeitenEnergies: Electrification of A Heavy-Duty CI Truck-Comparison of Electric Turbocharger and Crank Shaft Motorhektor AtkinsonNoch keine Bewertungen
- Artículo 1 PDFDokument9 SeitenArtículo 1 PDFERNESTO RAFAEL BAZAN PADILLANoch keine Bewertungen
- Ajmer SinghhDokument53 SeitenAjmer Singhhmd washiqeNoch keine Bewertungen
- Optimal Torque Split Strategy of Dual-Motor ElectrDokument21 SeitenOptimal Torque Split Strategy of Dual-Motor Electrquang caoNoch keine Bewertungen
- Hydraulic Regenerative Braking SystemDokument12 SeitenHydraulic Regenerative Braking SystemAnand KesarkarNoch keine Bewertungen
- 1 s2.0 S1876610212014634 MainDokument10 Seiten1 s2.0 S1876610212014634 Main129tonyegNoch keine Bewertungen
- Ac 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectDokument13 SeitenAc 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectAbdul HakeemNoch keine Bewertungen
- Modelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesDokument10 SeitenModelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesEduardo Garcia VázquezNoch keine Bewertungen
- 02 - Comparison Between Input Coupled and Output Coupled Power Split CVTDokument10 Seiten02 - Comparison Between Input Coupled and Output Coupled Power Split CVTYundi GaoNoch keine Bewertungen
- Banerjee 2018Dokument14 SeitenBanerjee 2018Prasad JoshiNoch keine Bewertungen
- Planetary Gear Power-Split Transmission Improves Loader EfficiencyDokument8 SeitenPlanetary Gear Power-Split Transmission Improves Loader EfficiencysughieantoNoch keine Bewertungen
- Design and Optimization of A Drivetrain With Two-Speed Transmission For Electric Delivery Step VanDokument8 SeitenDesign and Optimization of A Drivetrain With Two-Speed Transmission For Electric Delivery Step VanPrafulla DandgeNoch keine Bewertungen
- Regenerative For Electric VehiclesDokument7 SeitenRegenerative For Electric VehiclesSasidhar JannuNoch keine Bewertungen
- Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage systemDokument9 SeitenModel predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage systemChandresh TripathiNoch keine Bewertungen
- Chapter - 1Dokument39 SeitenChapter - 1ritesh chauhanNoch keine Bewertungen
- Agriculture 12 00436 v2Dokument22 SeitenAgriculture 12 00436 v2Adrian MarinNoch keine Bewertungen
- ExcavatorEnergy savingEfficiencyBasedonDieselEngineDokument9 SeitenExcavatorEnergy savingEfficiencyBasedonDieselEngineyusufNoch keine Bewertungen
- Abstract and Litreature ReviewDokument6 SeitenAbstract and Litreature ReviewUttarwar RuturajNoch keine Bewertungen
- Comparative Energy Analysis of A Load Sensing SystDokument19 SeitenComparative Energy Analysis of A Load Sensing SystMDLNoch keine Bewertungen
- Fuel Cell Hybrid Vehicle Fuzzy Logic Control StrategyDokument12 SeitenFuel Cell Hybrid Vehicle Fuzzy Logic Control StrategyŞura KaragözNoch keine Bewertungen
- Control Strategy of A Fuel-Cell Power Module For Electric ForkliftDokument11 SeitenControl Strategy of A Fuel-Cell Power Module For Electric Forkliftcan kaplanNoch keine Bewertungen
- Research Papers On Hydraulic Hybrid VehiclesDokument6 SeitenResearch Papers On Hydraulic Hybrid Vehiclesrfxlaerif100% (1)
- Energy Efficient Hydraulic Hybrid Drives: January 2009Dokument15 SeitenEnergy Efficient Hydraulic Hybrid Drives: January 2009Muh AmmadNoch keine Bewertungen
- Hybrid Electric Vehicles and Regenerative BrakingDokument7 SeitenHybrid Electric Vehicles and Regenerative BrakinggadrumNoch keine Bewertungen
- Regenerative Braking SystemDokument8 SeitenRegenerative Braking Systemsanjay sureshNoch keine Bewertungen
- M3 PDFDokument43 SeitenM3 PDFNeacsu Florin-MariusNoch keine Bewertungen
- Rebuttal - IMECE2016 66312 1Dokument9 SeitenRebuttal - IMECE2016 66312 1nrghataNoch keine Bewertungen
- 70-On The Dynamic Behavior of Series Hydraulic Hybrid VehicleDokument16 Seiten70-On The Dynamic Behavior of Series Hydraulic Hybrid VehicleGalal RabieNoch keine Bewertungen
- Hydrostatic Regenerative Braking System Rexroth Ra98310 - 2010-08Dokument8 SeitenHydrostatic Regenerative Braking System Rexroth Ra98310 - 2010-08JairoHernanLoperaNoch keine Bewertungen
- Energy Management Strategy For Atkinson Cycle Engine Based Parallel Hybrid Electric VehicleDokument11 SeitenEnergy Management Strategy For Atkinson Cycle Engine Based Parallel Hybrid Electric VehicleARUN VNoch keine Bewertungen
- Sname JSR 2020 64 2 171 PDFDokument14 SeitenSname JSR 2020 64 2 171 PDFGabriel EduardoNoch keine Bewertungen
- Development of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclesDokument11 SeitenDevelopment of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclessammyNoch keine Bewertungen
- Module 2Dokument59 SeitenModule 2prashanth9.n.sNoch keine Bewertungen
- Parallel HEV Hybrid Controller Modeling For Power ManagementDokument7 SeitenParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNoch keine Bewertungen
- Cob 2015 0926Dokument8 SeitenCob 2015 0926Di M. BraNoch keine Bewertungen
- Autonomous Hybrid Tractor Unit With A Predictive Control SystemDokument8 SeitenAutonomous Hybrid Tractor Unit With A Predictive Control SystemTJPRC PublicationsNoch keine Bewertungen
- Energy Management Strategy Design and Simulation VDokument15 SeitenEnergy Management Strategy Design and Simulation VAmogh RNoch keine Bewertungen
- Modelling and Simulation of Regenerative Braking System for Light Commercial VehicleDokument7 SeitenModelling and Simulation of Regenerative Braking System for Light Commercial Vehicleabdallah hosinNoch keine Bewertungen
- ExcavatorDokument10 SeitenExcavatorAnonymous OfU0JSNoch keine Bewertungen
- Regen Braking PresentationDokument19 SeitenRegen Braking Presentationabhishek_kumar_5100% (1)
- CVT2010 - Mech Hybrid Paper PDFDokument7 SeitenCVT2010 - Mech Hybrid Paper PDFSurendra SainiNoch keine Bewertungen
- Indian Railways and Hybrid Electric Vehicle: September 2015Dokument10 SeitenIndian Railways and Hybrid Electric Vehicle: September 2015Karthik spNoch keine Bewertungen
- Comparison Between Parallel Hybrid ConceptsDokument11 SeitenComparison Between Parallel Hybrid ConceptsDon ReloNoch keine Bewertungen
- Regenerative Braking StategyDokument10 SeitenRegenerative Braking StategyAshwin SelvakumarNoch keine Bewertungen
- Performance Investigation of A Series-Parallel Petrol-Electric VehicleDokument5 SeitenPerformance Investigation of A Series-Parallel Petrol-Electric VehicleSathish KumarNoch keine Bewertungen
- Energies: Design Methodology of A Power Split Type Plug-In Hybrid Electric Vehicle Considering Drivetrain LossesDokument18 SeitenEnergies: Design Methodology of A Power Split Type Plug-In Hybrid Electric Vehicle Considering Drivetrain Lossestuan anhNoch keine Bewertungen
- Basics of Electric Vehicle Technology and A Design StudyDokument5 SeitenBasics of Electric Vehicle Technology and A Design StudyHuynh Thanh AnhNoch keine Bewertungen
- Analysis of The Fuel Economy Benefit of Drivetrain HybridizationDokument13 SeitenAnalysis of The Fuel Economy Benefit of Drivetrain HybridizationPushkar WaretwarNoch keine Bewertungen
- Plug-In Hybrid Conversion of A Series Hybrid Electric Vehicle and Simulation ComparisonDokument6 SeitenPlug-In Hybrid Conversion of A Series Hybrid Electric Vehicle and Simulation ComparisonM VetriselviNoch keine Bewertungen
- Introduction to Hybrid Vehicle System Modeling and ControlVon EverandIntroduction to Hybrid Vehicle System Modeling and ControlBewertung: 4 von 5 Sternen4/5 (1)
- Innovation Landscape brief: Electric-vehicle smart chargingVon EverandInnovation Landscape brief: Electric-vehicle smart chargingNoch keine Bewertungen
- WT7554 Schwingmetall Catalog enDokument108 SeitenWT7554 Schwingmetall Catalog enmarkomasNoch keine Bewertungen
- Optimal Control Theory: An IntroductionDokument471 SeitenOptimal Control Theory: An Introductionmarkomas100% (1)
- J1939 BAM ExampleDokument18 SeitenJ1939 BAM Examplemarkomas50% (2)
- G3406 Engine-Maintenance IntervalsDokument54 SeitenG3406 Engine-Maintenance Intervalsmarkomas100% (2)
- ICEF UebungenDokument39 SeitenICEF UebungenmarkomasNoch keine Bewertungen
- Chemical Engg. 3rd SemDokument3 SeitenChemical Engg. 3rd SemAVERAGENoch keine Bewertungen
- Chapter Three:: Kinetics of Particles: Newton's Second LawDokument44 SeitenChapter Three:: Kinetics of Particles: Newton's Second LawSalahadin ShemsuNoch keine Bewertungen
- Injectors. Adaptations. Coding - Bimmerprofs - Com - NOx Emulator NOXEM 129 - 130 - 402 Developed For BMW N43 & N53 Series EnginesDokument27 SeitenInjectors. Adaptations. Coding - Bimmerprofs - Com - NOx Emulator NOXEM 129 - 130 - 402 Developed For BMW N43 & N53 Series EnginesMiguelNoch keine Bewertungen
- Bagatelle Showroom Structural AnalysisDokument15 SeitenBagatelle Showroom Structural AnalysisDhiraj BeechooNoch keine Bewertungen
- EASA Piston Engine Module Tutorial QuestionsDokument19 SeitenEASA Piston Engine Module Tutorial QuestionsJoseph Timoney100% (5)
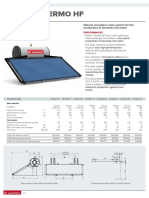
- Kairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionDokument4 SeitenKairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionFILID MADNoch keine Bewertungen
- BURNDY GK6426 SpecsheetDokument2 SeitenBURNDY GK6426 SpecsheetDavidNoch keine Bewertungen
- Mould Ejection OptDokument50 SeitenMould Ejection OptMohamed HassanNoch keine Bewertungen
- Introduction to Ultrasonic Testing PrinciplesDokument116 SeitenIntroduction to Ultrasonic Testing PrinciplesMuhamad AnwarudinNoch keine Bewertungen
- PTI AnchorageDokument18 SeitenPTI AnchorageMG Kim100% (1)
- Fluid Machinery Syllabus PDFDokument3 SeitenFluid Machinery Syllabus PDFBajajNoch keine Bewertungen
- Compresor Atlas Copco GA30Dokument16 SeitenCompresor Atlas Copco GA30Florin Maria Chirila100% (1)
- Pt. Gintam Tehnik: InspeksiDokument5 SeitenPt. Gintam Tehnik: Inspeksirizky youlandaNoch keine Bewertungen
- Circular Motion Week 2Dokument8 SeitenCircular Motion Week 2Solace HusseinNoch keine Bewertungen
- AhadDokument88 SeitenAhadAhmad NNoch keine Bewertungen
- Elektrisk (Katalog - Ermax)Dokument267 SeitenElektrisk (Katalog - Ermax)ionel1987Noch keine Bewertungen
- Modular 85 System, (MS-02-208) R3Dokument8 SeitenModular 85 System, (MS-02-208) R3herysyam1980Noch keine Bewertungen
- CFD Simulation of Cross-Ventilation For A Generic IsolatedDokument14 SeitenCFD Simulation of Cross-Ventilation For A Generic IsolatedMohamad HashemNoch keine Bewertungen
- 4 K53 Code C1 Pre Trip 1Dokument2 Seiten4 K53 Code C1 Pre Trip 1abubakr fingerNoch keine Bewertungen
- ValveDokument26 SeitenValvetiantaufik100% (1)
- 0303 MEA Multi V HeatpumpDokument119 Seiten0303 MEA Multi V HeatpumpfatjoebirdNoch keine Bewertungen
- F 1412 - 01 - Rje0mtiDokument6 SeitenF 1412 - 01 - Rje0mtiYasmin AminNoch keine Bewertungen
- Apex Status - Issue 2 (2-01-2008)Dokument22 SeitenApex Status - Issue 2 (2-01-2008)BorisLundbergNoch keine Bewertungen
- Ansys Fluent Simulation ReportDokument7 SeitenAnsys Fluent Simulation Reportsaitharun reddy.munthaNoch keine Bewertungen
- IEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108Dokument6 SeitenIEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108saeedalipourNoch keine Bewertungen
- GMC Truck NOS Parts List for 1941-1974 ModelsDokument7 SeitenGMC Truck NOS Parts List for 1941-1974 ModelsErick Quan LunaNoch keine Bewertungen
- New Holland - Grader 156-7Dokument16 SeitenNew Holland - Grader 156-7Cristian Cernega100% (1)
- Design of crane runway girdersDokument4 SeitenDesign of crane runway girdersHamdi AslanNoch keine Bewertungen
- Valve Actuator Young Tech KoreaDokument36 SeitenValve Actuator Young Tech Koreahk168Noch keine Bewertungen
- 5 Desain CVDokument5 Seiten5 Desain CVInda Sela GifariNoch keine Bewertungen