Das könnte Ihnen auch gefallen
- Schematisation HydrauliqueDokument5 SeitenSchematisation HydrauliqueOmar ChNoch keine Bewertungen
- Types de PompesDokument37 SeitenTypes de PompesMoad KhiderNoch keine Bewertungen
- Devoir À Rendre 12 - 12Dokument4 SeitenDevoir À Rendre 12 - 12Moad KhiderNoch keine Bewertungen
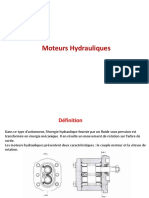
- Moteurs HydrauliquesDokument38 SeitenMoteurs HydrauliquesMoad KhiderNoch keine Bewertungen
- coursVHDL PDFDokument45 SeitencoursVHDL PDFToon ManNoch keine Bewertungen
- Performances Et Comportement Des PDFDokument338 SeitenPerformances Et Comportement Des PDFMoad KhiderNoch keine Bewertungen
- Chap 3-AOPDokument13 SeitenChap 3-AOPMoad KhiderNoch keine Bewertungen
- CCNA2 - Chapitre 1Dokument7 SeitenCCNA2 - Chapitre 1Omar NarututwoNoch keine Bewertungen
- Transistor Bipolaire - P3Dokument21 SeitenTransistor Bipolaire - P3Moad KhiderNoch keine Bewertungen
- Chap 2-Transistor À Effet Du ChampDokument13 SeitenChap 2-Transistor À Effet Du ChampMoad Khider100% (1)
- L Algebre de Boole PDFDokument20 SeitenL Algebre de Boole PDFMoad KhiderNoch keine Bewertungen
- Sec E3a 2003 Phyc PSIDokument4 SeitenSec E3a 2003 Phyc PSIMoad KhiderNoch keine Bewertungen
- Devoir CorrectionDokument1 SeiteDevoir CorrectionMoad Khider100% (1)
- TP2Dokument14 SeitenTP2Moad KhiderNoch keine Bewertungen
- Série D'exercices N°3-3tech-Bascules-Compteurs-2012-2013-CorrectionDokument10 SeitenSérie D'exercices N°3-3tech-Bascules-Compteurs-2012-2013-CorrectionMustapha LibourkiNoch keine Bewertungen
- Manuel D'utilisation Cryptosmart-Box 5.0 SP9-AADokument111 SeitenManuel D'utilisation Cryptosmart-Box 5.0 SP9-AADavid HDZNoch keine Bewertungen
- Comment Déterminer Le Sens de Variation D'une Suite ?Dokument1 SeiteComment Déterminer Le Sens de Variation D'une Suite ?exos2math100% (2)
- Cyberdétective Enquêtes Suisse Bâle, Berne, Bienne, CoireDokument14 SeitenCyberdétective Enquêtes Suisse Bâle, Berne, Bienne, CoireMarcJudicialisNoch keine Bewertungen
- FORMATION WORD 2007 Final PDFDokument37 SeitenFORMATION WORD 2007 Final PDFhoucineNoch keine Bewertungen
- TT5VDokument17 SeitenTT5VFrancis TaisantNoch keine Bewertungen
- Manuel TX-NR708 FrEs SN29400318pdfDokument192 SeitenManuel TX-NR708 FrEs SN29400318pdfMircea GonciarNoch keine Bewertungen
- Travaux Dirigés - Unix UserDokument6 SeitenTravaux Dirigés - Unix UserRaoùf Ben FadhélNoch keine Bewertungen
- Manuel StairDesigner VIDokument56 SeitenManuel StairDesigner VIZoeusNoch keine Bewertungen
- TD 31 - Simplification Et Recomposition D'une Fonction Logique PDFDokument4 SeitenTD 31 - Simplification Et Recomposition D'une Fonction Logique PDFJed MansouriNoch keine Bewertungen
- CodageDokument32 SeitenCodageAnonymous Wpl47Bwu4Noch keine Bewertungen
- Installation HydrolabDokument4 SeitenInstallation HydrolabBouba Maiga100% (3)
- Trasaction BDDokument58 SeitenTrasaction BDAli BNoch keine Bewertungen
- TP2 Tableaux (C)Dokument4 SeitenTP2 Tableaux (C)SomeonesokaNoch keine Bewertungen
- Piratage InformatiqueDokument33 SeitenPiratage InformatiqueMeryem Ez-zizi100% (1)
- Le Probeme de Voyageur de Commerce Et La Coloration Des Sommets D'un GrapheDokument9 SeitenLe Probeme de Voyageur de Commerce Et La Coloration Des Sommets D'un GrapheSamah Sam BouimaNoch keine Bewertungen
- TP 1Dokument4 SeitenTP 1Hanan AsabbaneNoch keine Bewertungen
- Guide de Configuration de FreenasDokument10 SeitenGuide de Configuration de Freenasapi-271974953Noch keine Bewertungen
- 1ère Chap2 Syst NumérationDokument11 Seiten1ère Chap2 Syst Numérationdockein yangaiNoch keine Bewertungen
- 3 - GemmaDokument25 Seiten3 - GemmaBrahim Aljjaou0% (1)
- 2385 C FR Um CR 30-x SystemDokument26 Seiten2385 C FR Um CR 30-x SystemMohamed Choukri Azzoula100% (2)
- PlansecDokument2 SeitenPlansecJeanne Sidonnie MemvoutaNoch keine Bewertungen
- Projet Securite RéseauxDokument192 SeitenProjet Securite Réseauxomafann100% (3)
- FreeRTOSDokument55 SeitenFreeRTOSsaraNoch keine Bewertungen
- Le HackingDokument5 SeitenLe HackingkingNoch keine Bewertungen
- Homme Criminel 1895 2Dokument121 SeitenHomme Criminel 1895 2danielNoch keine Bewertungen
- Excel 2010Dokument107 SeitenExcel 2010moustaphaNoch keine Bewertungen
- Tuto RedmineDokument8 SeitenTuto Redmineapi-373575618Noch keine Bewertungen
- Ds Sandblast AppliancesDokument4 SeitenDs Sandblast AppliancesYago MendozaNoch keine Bewertungen
- PCI DSS Compliance Checklist FrenchDokument10 SeitenPCI DSS Compliance Checklist FrenchDepolo PoloNoch keine Bewertungen