Das könnte Ihnen auch gefallen
- Create Models of Engineering Systems TutorialDokument28 SeitenCreate Models of Engineering Systems TutorialarietoxNoch keine Bewertungen
- Mechanical SystemsDokument43 SeitenMechanical SystemsRajendar PonagantiNoch keine Bewertungen
- 10144ec602 Measurements and Instrumentation PDFDokument93 Seiten10144ec602 Measurements and Instrumentation PDFsol_ashu95100% (1)
- Mathematical ModelingDokument8 SeitenMathematical ModelingMourougapragash SubramanianNoch keine Bewertungen
- Electronics Measurements and Instrumentation Ebook & NotesDokument94 SeitenElectronics Measurements and Instrumentation Ebook & NotesGunjan JhaNoch keine Bewertungen
- Mathematical Models: Module - 2Dokument13 SeitenMathematical Models: Module - 2Rajath UpadhyaNoch keine Bewertungen
- Introduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremsDokument42 SeitenIntroduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremskrajasekarantutiNoch keine Bewertungen
- Mathematical ModelingDokument7 SeitenMathematical ModelingTahmid ShihabNoch keine Bewertungen
- Reviewer ControlDokument10 SeitenReviewer ControlDioyo, ArvieNoch keine Bewertungen
- Instrumentation and Control. Engineering ModelsDokument28 SeitenInstrumentation and Control. Engineering Modelsadem ametiNoch keine Bewertungen
- Worksheet 1 - Introduction To PSCADDokument12 SeitenWorksheet 1 - Introduction To PSCADtaner56Noch keine Bewertungen
- Electric MachinesDokument17 SeitenElectric Machinespritt2010Noch keine Bewertungen
- Modelling Electrical SystemsDokument3 SeitenModelling Electrical SystemsPandu KNoch keine Bewertungen
- Chapter ThreeDokument13 SeitenChapter ThreeGetahun tuluNoch keine Bewertungen
- EC2255-Solved Problems in Control Systems PDFDokument182 SeitenEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- ZFGHFGHFGDokument6 SeitenZFGHFGHFGAhmad Firdaus Zawawil AnwarNoch keine Bewertungen
- Lumped Element ModelDokument6 SeitenLumped Element ModelLuis PressoNoch keine Bewertungen
- Chapter TwoDokument32 SeitenChapter TwowabdushukurNoch keine Bewertungen
- MPPT AlgorithmsDokument9 SeitenMPPT AlgorithmssimmulationNoch keine Bewertungen
- Mathematical Models of SystemsDokument45 SeitenMathematical Models of SystemsSaid Ahmed AliNoch keine Bewertungen
- Optimal Control of Switching Signals for DC-DC ConverterDokument7 SeitenOptimal Control of Switching Signals for DC-DC ConverterSriharsha SanthapurNoch keine Bewertungen
- PLECS-piece-wise Linear Electrical Circuit Simulation For SimulinkDokument6 SeitenPLECS-piece-wise Linear Electrical Circuit Simulation For Simulink曾乙申Noch keine Bewertungen
- Module 2 Controls PDFDokument24 SeitenModule 2 Controls PDFPrincess LutivaNoch keine Bewertungen
- Ec2351 Mi NotesDokument93 SeitenEc2351 Mi NotesChaitu KumarNoch keine Bewertungen
- Numerical Oscillations in EMTP PDFDokument4 SeitenNumerical Oscillations in EMTP PDFCarlos Lino Rojas AgüeroNoch keine Bewertungen
- SP Lab Exp1Dokument4 SeitenSP Lab Exp1himanshuNoch keine Bewertungen
- Control Systems 3B Lecture Notes MBauer 2Dokument6 SeitenControl Systems 3B Lecture Notes MBauer 2Nceba Perseverance MbeweNoch keine Bewertungen
- CS Two MarksDokument7 SeitenCS Two MarkssivaeinfoNoch keine Bewertungen
- Unesco - Eolss Sample Chapters: Mathematical Models in Electric Power SystemsDokument9 SeitenUnesco - Eolss Sample Chapters: Mathematical Models in Electric Power SystemsErick Daniel Toyo MarinNoch keine Bewertungen
- Modeling and Simulation of Dynamic Systems: Lecture Notes of ME 862Dokument9 SeitenModeling and Simulation of Dynamic Systems: Lecture Notes of ME 862RajrdbNoch keine Bewertungen
- Basic Elements of Control SystemDokument36 SeitenBasic Elements of Control Systemeugeni madaNoch keine Bewertungen
- Laplace transform applications in circuit theoryDokument10 SeitenLaplace transform applications in circuit theorySudip BiswasNoch keine Bewertungen
- MODELING CONTROL SYSTEMSDokument11 SeitenMODELING CONTROL SYSTEMSAnonymous UrzdtCB0INoch keine Bewertungen
- Power Quality Improvement in DC Drives Using Matlab/SimulinkDokument5 SeitenPower Quality Improvement in DC Drives Using Matlab/SimulinkwisdombasedcomputingNoch keine Bewertungen
- Dissipativity Properties of Detailed Models of Synchronous GeneratorsDokument6 SeitenDissipativity Properties of Detailed Models of Synchronous Generatorssridhar_n@email.comNoch keine Bewertungen
- Summary of Topic Covered in ECE408Dokument89 SeitenSummary of Topic Covered in ECE408Nishikata ManipolNoch keine Bewertungen
- A Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsDokument10 SeitenA Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsjeffguitarNoch keine Bewertungen
- Engineering SystemsDokument5 SeitenEngineering Systemsbedilu77Noch keine Bewertungen
- Feedback Control System: Mathematical ModelDokument59 SeitenFeedback Control System: Mathematical ModelRachana GadeNoch keine Bewertungen
- 04 Transfer FunctionDokument4 Seiten04 Transfer FunctionJosue MarshallNoch keine Bewertungen
- Analysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude ControlDokument8 SeitenAnalysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude Controleubis_machado4370Noch keine Bewertungen
- 140 CoronadoDokument7 Seiten140 CoronadoUplander DodyNoch keine Bewertungen
- ES197 LectureDokument45 SeitenES197 LectureAbisan ArulananthamNoch keine Bewertungen
- Samantaray 2001 WWW - Bondgraphs.com AboutDokument25 SeitenSamantaray 2001 WWW - Bondgraphs.com AboutAnwarul IslaamNoch keine Bewertungen
- Digital Computer Solution of Electromagnetic Transients in Single and Multiple NetworksDokument12 SeitenDigital Computer Solution of Electromagnetic Transients in Single and Multiple Networks曾乙申100% (1)
- Control System 2MARKSDokument16 SeitenControl System 2MARKSSeekay Alais Karuppaiah CNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Ideal vs non-ideal bond graph modeling of switchesDokument8 SeitenIdeal vs non-ideal bond graph modeling of switchesdavidhartshorneNoch keine Bewertungen
- Fundamentals of Electrical Engineering (EE215Dokument51 SeitenFundamentals of Electrical Engineering (EE215Phan Phuong NgocNoch keine Bewertungen
- Circuit Theory Analysis Lecture Notes All Unit PDFDokument259 SeitenCircuit Theory Analysis Lecture Notes All Unit PDFDeivasigamani Subramaniyan100% (2)
- Modeling of Electromechanical Systems PDFDokument44 SeitenModeling of Electromechanical Systems PDFBrandon GordonNoch keine Bewertungen
- Educational Analog Computer EC1-OPDokument40 SeitenEducational Analog Computer EC1-OPleneneck9057Noch keine Bewertungen
- ControlDokument2 SeitenControladauNoch keine Bewertungen
- Analysis and Applications of Laplace/Fourier Transformations in Electric CircuitDokument8 SeitenAnalysis and Applications of Laplace/Fourier Transformations in Electric Circuitastro trumpNoch keine Bewertungen
- Lab3 r1Dokument2 SeitenLab3 r1Anteneh AmsaluNoch keine Bewertungen
- ELM 322, Control Systems Control Systems Spring 2015Dokument37 SeitenELM 322, Control Systems Control Systems Spring 2015kaanNoch keine Bewertungen
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Von EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Noch keine Bewertungen
- Quick Review Outline - Masschusetts Testing for Educator Licensure (MTEL) Tech and Eng ExamVon EverandQuick Review Outline - Masschusetts Testing for Educator Licensure (MTEL) Tech and Eng ExamNoch keine Bewertungen
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsVon EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNoch keine Bewertungen
- Thermal Systems: Background System ElementsDokument7 SeitenThermal Systems: Background System ElementsAjay Nath S ANoch keine Bewertungen
- ch8 - 2 BasicSystemModelingfHaudraulicSystem PDFDokument31 Seitench8 - 2 BasicSystemModelingfHaudraulicSystem PDFAjay Nath S ANoch keine Bewertungen
- 08.305 Electronic Circuits 1 SyllabusDokument2 Seiten08.305 Electronic Circuits 1 SyllabusAjay Nath S ANoch keine Bewertungen
- Electrical Building Blocks ExplainedDokument71 SeitenElectrical Building Blocks ExplainedAjay Nath S A100% (1)
- Out2t1 PDFDokument27 SeitenOut2t1 PDFAjay Nath S ANoch keine Bewertungen
- Electrical Building Blocks ExplainedDokument71 SeitenElectrical Building Blocks ExplainedAjay Nath S A100% (1)
- New Text DocumentDokument1 SeiteNew Text DocumentAjay Nath S ANoch keine Bewertungen
- Goldfarb CVDokument13 SeitenGoldfarb CVAjay Nath S ANoch keine Bewertungen
- PLDTUTORDokument13 SeitenPLDTUTORAjay Nath S ANoch keine Bewertungen
- Syllabus 08 EceDokument109 SeitenSyllabus 08 EceAjay Nath S ANoch keine Bewertungen
- Internet Access Via Cable TVDokument23 SeitenInternet Access Via Cable TVAjay Nath S ANoch keine Bewertungen
- Smith Chart FundamentalsDokument8 SeitenSmith Chart FundamentalsMohammed IbrahimNoch keine Bewertungen
- Siemens Vacumm Contactor 3tl6Dokument15 SeitenSiemens Vacumm Contactor 3tl6Yong Ee VonnNoch keine Bewertungen
- Lecture 5Dokument43 SeitenLecture 5Mjj VegaNoch keine Bewertungen
- Spiritual Science ResearchDokument9 SeitenSpiritual Science Research5joanNoch keine Bewertungen
- DMSTDokument89 SeitenDMSTCarlos Sánchez Coppel100% (1)
- Martensitic TransformationsDokument38 SeitenMartensitic TransformationsquitzlcoatlNoch keine Bewertungen
- Lateral Earth PressureDokument122 SeitenLateral Earth PressureEric DelunaNoch keine Bewertungen
- Strength of MaterialsDokument6 SeitenStrength of MaterialsstevenspillkumarNoch keine Bewertungen
- Homework Set No. 1 - 2019Dokument6 SeitenHomework Set No. 1 - 2019KevinNoch keine Bewertungen
- Closed Conduit Hydraulics DesignDokument44 SeitenClosed Conduit Hydraulics DesignRaje kNoch keine Bewertungen
- Corrosion 2Dokument8 SeitenCorrosion 2alyNoch keine Bewertungen
- Magnetorheological Fluid and Its ApplicationsDokument6 SeitenMagnetorheological Fluid and Its ApplicationsshreedharkolekarNoch keine Bewertungen
- Air Stripping of AcetoneDokument19 SeitenAir Stripping of AcetoneGabe100% (1)
- Fluid Mechanics Fundamentals and Applications 4Th Edition Cengel Solutions Manual Full Chapter PDFDokument67 SeitenFluid Mechanics Fundamentals and Applications 4Th Edition Cengel Solutions Manual Full Chapter PDFfionaalexandrahukc100% (10)
- Resonant Column Last VersionDokument34 SeitenResonant Column Last Versionkabasy2015Noch keine Bewertungen
- ElectricityDokument16 SeitenElectricitypatrick omonyNoch keine Bewertungen
- Materials Science HW ProblemsDokument8 SeitenMaterials Science HW Problemsamitav_chak9523Noch keine Bewertungen
- Daily Practice Problems Chapter Provides Accurate Physics PracticeDokument4 SeitenDaily Practice Problems Chapter Provides Accurate Physics PracticePritam kumar100% (1)
- Trashrack DesignDokument12 SeitenTrashrack DesignAnonymous b9DIaPTq6BNoch keine Bewertungen
- Sample Problems Free FallDokument3 SeitenSample Problems Free FallguevarrajessphilipNoch keine Bewertungen
- Q3-Q4 Teachers Guide v1.0 PDFDokument103 SeitenQ3-Q4 Teachers Guide v1.0 PDFTitat Placedes Taniog100% (1)
- Calculating Enthalpies of ReactionsDokument5 SeitenCalculating Enthalpies of ReactionsPatrickNoch keine Bewertungen
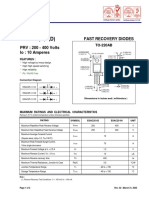
- ESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesDokument2 SeitenESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesCarlos David MarquezNoch keine Bewertungen
- Tugas Ujian FIXDokument3 SeitenTugas Ujian FIXNofi RahmayantiNoch keine Bewertungen
- Thesis W QuakDokument178 SeitenThesis W Quakdr_kh_ahmedNoch keine Bewertungen
- Conductors and Electric Field in Static EquilibriumDokument1 SeiteConductors and Electric Field in Static Equilibriumfrance villNoch keine Bewertungen
- Mullion AnalysisDokument4 SeitenMullion AnalysisganeshNoch keine Bewertungen
- Binding QDokument5 SeitenBinding Qpraveen alwisNoch keine Bewertungen
- Simulation of The Plug Assisted Thermoforming of Polypropylene Using A Large Strain Thermally Coupled Constitutive ModelDokument26 SeitenSimulation of The Plug Assisted Thermoforming of Polypropylene Using A Large Strain Thermally Coupled Constitutive ModelFadi DabbitNoch keine Bewertungen
- Basic Structure of Eddy Current Brakes: Found in Cars As WellDokument7 SeitenBasic Structure of Eddy Current Brakes: Found in Cars As Wellpseudo networkNoch keine Bewertungen
- AQA Physics Students Book AnswersDokument3 SeitenAQA Physics Students Book AnswersT-Forty ArrowNoch keine Bewertungen