Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- An 345Dokument4 SeitenAn 345thangaraj_icNoch keine Bewertungen
- 2602 - Basics of Multiplexers 2 - SlidesDokument10 Seiten2602 - Basics of Multiplexers 2 - Slidesthangaraj_icNoch keine Bewertungen
- Thirumanthirambook 1Dokument39 SeitenThirumanthirambook 1jeyankarunanithiNoch keine Bewertungen
- ) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsDokument32 Seiten) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsSainadh YerrapragadaNoch keine Bewertungen
- 75 How To Stop Worrying and Start Living PDFDokument6 Seiten75 How To Stop Worrying and Start Living PDFFelimon Megerssa100% (2)
- IDDQ Failure Diagnosis Is Here: Ron PressDokument2 SeitenIDDQ Failure Diagnosis Is Here: Ron Pressthangaraj_icNoch keine Bewertungen
- WWW Planetanalog Com DifferentialSignaling 1Dokument5 SeitenWWW Planetanalog Com DifferentialSignaling 1thangaraj_icNoch keine Bewertungen
- e2e.ti.comDokument3 Seitene2e.ti.comthangaraj_icNoch keine Bewertungen
- Layout Design GuideDokument41 SeitenLayout Design Guidethangaraj_icNoch keine Bewertungen
- App 114Dokument17 SeitenApp 114thangaraj_icNoch keine Bewertungen
- Day3 FLEXDokument49 SeitenDay3 FLEXthangaraj_ic100% (1)
- Tech Note 107Dokument4 SeitenTech Note 107thangaraj_icNoch keine Bewertungen
- Analog Layout and Grounding TechniquesDokument7 SeitenAnalog Layout and Grounding TechniquesSijo XaviarNoch keine Bewertungen
- App 119Dokument19 SeitenApp 119thangaraj_icNoch keine Bewertungen
- AppendixDokument23 SeitenAppendixthangaraj_icNoch keine Bewertungen
- WWW Planetanalog Com CurrentsenseDokument6 SeitenWWW Planetanalog Com Currentsensethangaraj_icNoch keine Bewertungen
- Adc DNL INLDokument5 SeitenAdc DNL INLNabil IshamNoch keine Bewertungen
- Embeddedgurus ComDokument5 SeitenEmbeddedgurus Comthangaraj_icNoch keine Bewertungen
- P 1779Dokument4 SeitenP 1779thangaraj_icNoch keine Bewertungen
- Getting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2Dokument7 SeitenGetting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2thangaraj_icNoch keine Bewertungen
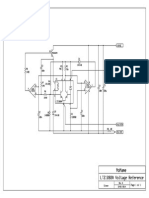
- LTZ Ref BoardDokument1 SeiteLTZ Ref Boardthangaraj_icNoch keine Bewertungen
- 12b.iep Activity1 2013Dokument28 Seiten12b.iep Activity1 2013demos2011Noch keine Bewertungen
- EMC and NoiseDokument47 SeitenEMC and Noisethangaraj_icNoch keine Bewertungen
- Bhaja Govindam in TamilDokument6 SeitenBhaja Govindam in Tamilthangaraj_icNoch keine Bewertungen
- PCBStackups (Ott)Dokument18 SeitenPCBStackups (Ott)krishnamohankola321Noch keine Bewertungen
- Hybrid PCB Stack Up GuideDokument13 SeitenHybrid PCB Stack Up Guidethangaraj_icNoch keine Bewertungen
- Instrumentation AmplifierDokument6 SeitenInstrumentation Amplifierilg1Noch keine Bewertungen
- Agarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005Dokument136 SeitenAgarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005შაქრო ტრუბეცკოიNoch keine Bewertungen
- Subsection 4 4 1Dokument6 SeitenSubsection 4 4 1thangaraj_icNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CSS Lab ManualDokument32 SeitenCSS Lab ManualQaif AmzNoch keine Bewertungen
- 002 Ac Yoke B100-ParkerDokument2 Seiten002 Ac Yoke B100-ParkerNubia BarreraNoch keine Bewertungen
- University of Cambridge International Examinations General Certificate of Education Advanced LevelDokument4 SeitenUniversity of Cambridge International Examinations General Certificate of Education Advanced LevelHubbak KhanNoch keine Bewertungen
- Fire Dynamic Damper Installation InstructionsDokument18 SeitenFire Dynamic Damper Installation InstructionsJohnMerrNoch keine Bewertungen
- Microcontroller Based Vehicle Security SystemDokument67 SeitenMicrocontroller Based Vehicle Security Systemlokesh_045Noch keine Bewertungen
- RomerDokument20 SeitenRomerAkistaaNoch keine Bewertungen
- 1400 CFM TDokument3 Seiten1400 CFM TmahmadwasiNoch keine Bewertungen
- Cópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersDokument6 SeitenCópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersFernanda AzevedoNoch keine Bewertungen
- Latihan Matematik DLP Minggu 1Dokument3 SeitenLatihan Matematik DLP Minggu 1Unit Sains Komputer MRSM PendangNoch keine Bewertungen
- GTG - TFA Belt DrivenDokument2 SeitenGTG - TFA Belt Drivensuan170Noch keine Bewertungen
- Ss e (Bocr) ManualDokument2 SeitenSs e (Bocr) ManualNaveen GuptaNoch keine Bewertungen
- 1.summative-Test Math7Dokument1 Seite1.summative-Test Math7Jaylor GaridoNoch keine Bewertungen
- Teleprotection Over IP MPLS Network White PaperDokument23 SeitenTeleprotection Over IP MPLS Network White PaperLakshmi Kiran100% (1)
- Chord Tone Improvisation Part IDokument38 SeitenChord Tone Improvisation Part I2018 01097Noch keine Bewertungen
- Chem 17 Exp 3 RDR Chemical KineticsDokument4 SeitenChem 17 Exp 3 RDR Chemical KineticscrazypatrishNoch keine Bewertungen
- Pressure Sensor Air PST Datasheet 51 en 2780071435Dokument3 SeitenPressure Sensor Air PST Datasheet 51 en 2780071435Luis GuevaraNoch keine Bewertungen
- Biomechanic of Foot PDFDokument8 SeitenBiomechanic of Foot PDFMichealowen BabygoalNoch keine Bewertungen
- T0000598REFTRGiDX 33RevG01052017 PDFDokument286 SeitenT0000598REFTRGiDX 33RevG01052017 PDFThanhNoch keine Bewertungen
- ProjectDokument6 SeitenProjecthazimsyakir69Noch keine Bewertungen
- Nihonto Part IDokument38 SeitenNihonto Part IGergő VidaNoch keine Bewertungen
- SL-19536 - REV2!02!13 User Manual MC CondensersDokument68 SeitenSL-19536 - REV2!02!13 User Manual MC CondensersCristian SevillaNoch keine Bewertungen
- Systems - of - EquationsDokument39 SeitenSystems - of - EquationsAnonymous 5aPb088W100% (1)
- Lab Assignment - 2: CodeDokument8 SeitenLab Assignment - 2: CodeKhushal IsraniNoch keine Bewertungen
- Chap005 3Dokument26 SeitenChap005 3Anass BNoch keine Bewertungen
- Plagiarism - ReportDokument6 SeitenPlagiarism - ReportDipesh NagpalNoch keine Bewertungen
- Book Review: Laser Fundamentals, 2nd Edition by William T. SilfvastDokument2 SeitenBook Review: Laser Fundamentals, 2nd Edition by William T. SilfvastAbhishekNoch keine Bewertungen
- Highway Design ProjectDokument70 SeitenHighway Design ProjectmuhammedNoch keine Bewertungen
- SR-X Script Reference - EDokument24 SeitenSR-X Script Reference - EDomagoj ZagoracNoch keine Bewertungen
- Fitting Fundamentals: For SewersDokument21 SeitenFitting Fundamentals: For SewersLM_S_S60% (5)
- GMS60CSDokument6 SeitenGMS60CSAustinNoch keine Bewertungen