IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE)
e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 10, Issue 5 Ver. I (Sep Oct. 2015), PP 16-20
www.iosrjournals.org
Sliding Mode Observer for Torque Control in Sensorless BLDC
Motor
Avinash B. Ghule1 and Subhash S. Sankeshwari2
1
PG Student, M.B.E. Societys College of, Engineering, Ambajogai (M.S), India
PG Department, M.B.E. Societys College of Engineering, Ambajogai (M.S), India
Abstract: In this paper a method for estimation of torque is proposed in case of sensorless bldc motor. The bldc
motors are used in places that require fast torque response, high effiency, high power density where torque
pulsations problem may occure. A Sliding mode observer combined with extended kalman filter is proposed for
bldc motor using matlab simulation for estimation of instantenous torque. Sliding mode observer is a parameter
for estimating the phase to phase trapezoidal back-EMF in sensor less mode. The extended Kalman filter (EKF)
is the nonlinear version of the Kalman filter which linearizes about an estimate of the current mean and
covariance.
Keywords: BLDC motor,Sliding mode observer, Extended kalman filter,DTC
I. Introduction
Now a days brushless dc motors (BLDC) are frequently used in many domestic and industrial
applications ranging from servo to traction drives, due to several distinct advantages such as large torque to
inertia ratio, high efficiency, high power density, large power rate, fast torque response and simplicity in their
control BLDC machine has a trapezoidal back-EMF waveform and a rectangular current waveform [1].
But in BLDC motor undesirable torque pulsation causes speed oscillations and excitation of
resonances in mechanical portions of the drive, leading to acoustic noise and visible vibration patterns in highprecision machines. BLDC motor torque pulsations produce noise and vibration in the system[ 2 ]. Therefore,
minimization or elimination of noise and vibration is a considerable issue in BLDC drive. Also BLDC motor is
connected to infinite bus bar in interconnected power system leading to torque pulsations due to non linear load.
In this paper, the sensorless direct torque control (DTC) of a BLDC drive is studied.
In order to minimize the torque pulsations, various torque-control methods have been proposed for the
BLDC drives. For example, an instantaneous torque controller that is based on a variable structure control in the
dq reference frame was proposed. However, it was only applicable to the 180 electrical conduction mode of
operation and cannot be used in the 120 electrical conduction mode. Another problem in a BLDC motor control
is that the PI controller is usually employed, which is simple in realization but difficult to obtain a sufficient
high performance in the tracking application[3].
Torque observer techniques based on a Luenberger observer is presented in[4] , in which mechanical
equations, involving mechanical parameters which were difficult to obtain accurately, were employed.
Furthermore, the estimated load torque could not be directly used in the DTC scheme.
Sliding-mode observers are known to be insensitive to parameter variations and disturbances[5], A
sliding-mode observer is employed to estimate the nonsinusoidal back-EMF waveform, while a simplified
extended Kalman filter (EKF) is used to estimate the rotor speed and facilitate sensorless control. A significant
advantage is that it eliminates the need for low-pass filters. Both are combined to calculate the instantaneous
electromagnetic torque, with the effectiveness of the method being validated by simulations and measurements.
II. Bldc Motor
BLDC motors are a kind of synchronous motor. This indicates the magnetic field produced by the
stator and the magnetic field produced by the rotor twirls at the same frequency. BLDC motors do not
experience the slip that is normally observed in induction motors. BLDC motor is built with a permanent
magnet rotor and wire wound stator poles . The flux distribution in BLDC motor is trapezoidal and hence the d
q rotor reference frames model is not suitable The derivation of this model is depends on the postulations that
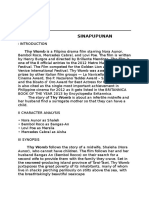
the induced currents in the rotor due to stator harmonic fields, iron and stray losses are neglected. The fig.(1)
shows the equivalent circuit of BLDC motor.
DOI: 10.9790/1676-10511620
www.iosrjournals.org
16 | Page
Sliding Mode Observer for Torque Control in Sensorless BLDC Motor
Fig. (1): Equivalent circuit of BLDC motor.
The differential equation governing the electrical part of the model can be written as,
= + +
(1)
where, V=DC voltage applied in Volts.
L=Inductance of the windings in Henry.
R=Resistance of the windings in Ohms.
E = Kb =Back emf of the motor.
Kb =Back emf constant in Volts/ rad/ sec.
=Speed in rad/ sec.
E=Disturbance as input
For a BLDC motor equipped with a surface-mounted magnet rotor and having a non sinusoidal backEMF waveform, the electromagnetic torque can be expressed as
3
= 22
(2)
Where p is the number of poles, e is the rotor electrical angle, and r , r, is , and is are the - and
-axis rotor flux linkages and stator currents in the stationary reference frame, respectively. The back-EMF
waveform is sinusoidal and represents the fundamental component of the electromagnetic torque. The
normalized nonsinusoidal back-EMF waveform can be derived from the ratio of the back-EMF to the electrical
angular velocity.
III. Sliding Mode Observer For Bldc Motor
Sliding mode observer (SMO) shown in figure 2 is used to estimate the stator flux. It is a non-linear
control method that may modify the system performance. The SMO can be designed with two approaches. In
the first approach the system equations can be converted into two suitable sub systems. The second approach is
for designing the state observer. SMO is also used to estimate the back-EMFs accurately. By assuming s =
Ls is + r , where s , r and is are the stator flux linkage vector, the rotor flux-linkage vector, and the stator
current vector, respectively, the voltage equations for a BLDC motor can be expressed as,
= + +
(3)
= +
(4)
where Rs and Ls are the stator winding resistance and inductance
The sliding-mode observer can be constructed in the form of state variable equation as
= + + sin ( )
DOI: 10.9790/1676-10511620
(5)
www.iosrjournals.org
17 | Page
Sliding Mode Observer for Torque Control in Sensorless BLDC Motor
Ks is the gain matrix
Fig. (2) Block diagram of the sliding-mode observer
IV. Extended Kalman Filter
The DTC algorithm does not require rotor-position information and needs only a stator flux-linkage
vector information . In this paper, the speed is estimated by employing a simplified EKF similar to the one used
in which extracted the rotor speed and position from the relatively noisy output of a resolver. The estimated
speed is used for speed feedback and electromagnetic-torque calculation to realize sensorless control and
instantaneous torque estimation.
+ 1 = , + , + ()
(6)
= , + ()
(7)
Where u(k) and y(k) are the input and output signals, respectively, and w(k) and (k) are the process
noise and measurement noise, respectively. x(k) is the state vector, which can be estimated by the EKF and is
given by
+ 1 = , + , + [ , ]
(8)
The simplified EKF method extracts speed information from the fundamental components of the
nonsinusoidal back-EMFs, while other harmonic components are considered as measurement noise. Hence, it is
much more appropriate than the conventional method, which employs the arctan function to obtain rotor
position information and derives the speed by differentiation. Hence, for speed estimation, only the fundamental
components of e and e are required.
the rotor electrical angular velocity and position can be estimated from the following equations
= 2 cos e 1() sine ()
e k + 1 = [e k + Ts + 1 ]
+ 1 = + + 2
+ 1 = + 3
(9)
(10)
(11)
(12)
Where e and are the estimated rotor electrical position and angular velocity
DOI: 10.9790/1676-10511620
www.iosrjournals.org
18 | Page
Sliding Mode Observer for Torque Control in Sensorless BLDC Motor
V.
Simulation Result
The overall block diagram of sensorless direct torque control of BLDC drive is simulated by
MATLAB/Simulink. We can calculate the torque which is controlled by sliding mode observer as shown in fig.
(3)
Fig.(3) Estimated Torque
Then speed estimation is shown in fig. (4) .The roter speed can be calculated by using kalman filter.
Fig.(4) Estimated rotor speed
The below fig. (5) shows the phase current in which change of current at various time instants
Fig.(5) Estimated Current
The below fig. (6) shows the phase voltage in which change of voltage at various time instants
Fig(6) Estimated Current
From the analysis of these results, it is shown that the estimated outputs are accurate. However there is
a problem of chattering effect in the estimated waveforms. By neglecting that effect of chattering, sliding mode
observer is a very good sensorless method for the estimation of Torque and speed. Voltage and current are
combinely used for the purpose of speed and torque estimation. By neglecting that effect of chattering, sliding
mode observer is a very good sensorless method for the estimation of phase-to-phase back-EMFs, rotor position
and angular velocity.
DOI: 10.9790/1676-10511620
www.iosrjournals.org
19 | Page
Sliding Mode Observer for Torque Control in Sensorless BLDC Motor
VI. Conclusion
The paper proposes technique for minimization of torque pulsations. A sliding mode observer together
with a simplified EKF has been successfully used to estimate the instantaneous torque, as confirmed by both the
simulations and measurements. Sliding mode observer is efficient to all other controllers. Simulation results
shows SMO with saturation function has better speed response, reduced torque ripple and the less effect of
chattering in the estimation of rotor position .
References
[1].
[2].
[3].
[4].
[5].
[6].
[7].
[8].
[9].
M. Rameshkanna ,Mrs. S. Sivaranjani,Analysis of Sliding Mode Observer Based SVPWM Inverter Fed BLDC Motor, IJSTE
International Journal of Science Technology & Engineering, Volume 1, Issue 11,May 2015
Yong Liu, Zi Qiang Zhu and David Howe , Instantaneous Torque Estimation in Sensorless Direct-Torque-Controlled Brushless
DC Motors.IEEE transactions on industry applications, vol. 42, no. 5, september/october 2006
Teck-Seng Low, Tong-Heng Lee, King-Jet Tseng, and Kai-Sang Lock, Servo Performance of a BLDC Drive with Instantaneous
Torque Control ieee transactions on industry applications, vol. 28, no. 2, marchjapril 1992
D.Suganyadevi, Dr. M. Sathiskumar, Direct Torque Control In BLDC Motor Using Four Swich Inverter, International Journal of
Science, Engineering and Technology Research (IJSETR), Volume 3, Issue 12, December 2014
Brushless DC Motors,http://www.portescap.com
Becerra, R.C.; Ehsani, M.,High-Speed Torque Control of Brushless Permanent Magnet Motors, IEEE Trans. Ind. Electron. 1988,
35, 402-406.
T. S. Low, T. H. Lee, K. J. Tseng, and K. S. Lock, Servo performance of a BLDC drive with instantaneous torque control, IEEE
Trans. Ind. Appl.,vol. 28, no. 2, pp. 455462, Mar./Apr. 1992.
Qian Yuan, Zhong-ping Yang, Sensorless Control of Permanent Magnet Synchronous Motor with Stator Flux Estimation,
JOURNAL OF COMPUTERS, VOL. 8, NO. 1, JANUARY 2013
Girija P.K, Prince A, Sliding Mode Observer based Sensorless Control of Brushless DC Motor under DTC Scheme, international
Journal Of Advanced Research in Electrical, Electronics and Instrumentation Engineering, vol. 2, Nov13
DOI: 10.9790/1676-10511620
www.iosrjournals.org
20 | Page
Das könnte Ihnen auch gefallen
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDokument7 SeitenSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNoch keine Bewertungen
- Ijetae 0812 25 PDFDokument10 SeitenIjetae 0812 25 PDFvishiwizardNoch keine Bewertungen
- A New Approach To Sensorless Control Method For Brushless DC MotorsDokument23 SeitenA New Approach To Sensorless Control Method For Brushless DC Motorsdeepthi056Noch keine Bewertungen
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDokument6 SeitenA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNoch keine Bewertungen
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDokument5 SeitenPID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNoch keine Bewertungen
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDokument5 SeitenDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNoch keine Bewertungen
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDokument6 SeitenPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNoch keine Bewertungen
- IEEE PES 12plsdfa20mcmsamDokument7 SeitenIEEE PES 12plsdfa20mcmsamParameswararao BillaNoch keine Bewertungen
- Direct Torque Control of Induction MotorsDokument6 SeitenDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- EKF Applied To BLDCDokument9 SeitenEKF Applied To BLDCUma SathyadevanNoch keine Bewertungen
- Four Switch Three Phase Inverter Control of BLDC MotorDokument6 SeitenFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNoch keine Bewertungen
- IJSC Vol2 Iss1 253 260 2 PDFDokument8 SeitenIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNoch keine Bewertungen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Sensorless Control of A Brushless DC MotorDokument7 SeitenSensorless Control of A Brushless DC MotorTrong LeNoch keine Bewertungen
- Design and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorDokument9 SeitenDesign and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorSoujanya VinnakotaNoch keine Bewertungen
- Sensorless Field OrientedDokument8 SeitenSensorless Field Orientedmv1970Noch keine Bewertungen
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Dokument7 SeitenSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNoch keine Bewertungen
- Simplified Sensorless Control For BLDC Motor, Using DSP TechnologyDokument12 SeitenSimplified Sensorless Control For BLDC Motor, Using DSP Technologymichael.schuhNoch keine Bewertungen
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDokument4 SeitenIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNoch keine Bewertungen
- Vector Control Simulation of AC MotorDokument16 SeitenVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDokument8 SeitenField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNoch keine Bewertungen
- 2Dokument6 Seiten2Sairam SaiNoch keine Bewertungen
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDokument8 SeitenECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNoch keine Bewertungen
- Handbook and Application Guide For High-Performance Brushless Servo SystemsDokument26 SeitenHandbook and Application Guide For High-Performance Brushless Servo SystemsAnonymous bjXxKrQa6bNoch keine Bewertungen
- DSP Control of Stepper MotorDokument5 SeitenDSP Control of Stepper MotorAhmedHyderMohdNoch keine Bewertungen
- D.C control matlab روكانDokument17 SeitenD.C control matlab روكانMustafa AlhumayreNoch keine Bewertungen
- SFC OperationDokument10 SeitenSFC OperationKelvin LiewNoch keine Bewertungen
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDokument15 SeitenSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNoch keine Bewertungen
- M Phase MototrDokument6 SeitenM Phase MototrRija AliNoch keine Bewertungen
- Simulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemDokument5 SeitenSimulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemLê Quốc ViệtNoch keine Bewertungen
- CMP0193 SynopsisDokument6 SeitenCMP0193 Synopsissumiths32Noch keine Bewertungen
- Brushed DC Sensorless FeedbackDokument3 SeitenBrushed DC Sensorless FeedbackHoon Miew JieNoch keine Bewertungen
- A Study of Synchronous Motor Drive Using SFCDokument4 SeitenA Study of Synchronous Motor Drive Using SFCBrian GuevaraNoch keine Bewertungen
- Embedded BLCDDokument24 SeitenEmbedded BLCDDhananjay PatilNoch keine Bewertungen
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDokument5 SeitenSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNoch keine Bewertungen
- Basic BLDC ControllerDokument9 SeitenBasic BLDC ControllerRen KiyoshiiNoch keine Bewertungen
- (Matsui) Sensorless PM Brushless DC Motor DrivesDokument9 Seiten(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngNoch keine Bewertungen
- A Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesDokument7 SeitenA Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesKoukou AmkoukouNoch keine Bewertungen
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDokument7 SeitenA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNoch keine Bewertungen
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDokument5 SeitenSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNoch keine Bewertungen
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDokument9 SeitenSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNoch keine Bewertungen
- Simplified Sensorless Control For BLDC MDokument12 SeitenSimplified Sensorless Control For BLDC MAlg DimasNoch keine Bewertungen
- Model Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Dokument9 SeitenModel Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Na ChNoch keine Bewertungen
- BLDC Sepic Motor Torque ControlDokument60 SeitenBLDC Sepic Motor Torque ControlSuresh SsbnNoch keine Bewertungen
- Simulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentDokument4 SeitenSimulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentnandhakumarmeNoch keine Bewertungen
- Subject (UNREG08) - Sensorless Motor ControlDokument7 SeitenSubject (UNREG08) - Sensorless Motor ControlsorrowarNoch keine Bewertungen
- Speed Control of Brushless DC Motor With DSP Controller Using MatlabDokument6 SeitenSpeed Control of Brushless DC Motor With DSP Controller Using MatlabramjiNoch keine Bewertungen
- Speed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerDokument6 SeitenSpeed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerVijay KumarNoch keine Bewertungen
- Simulation by Composite ModelDokument8 SeitenSimulation by Composite Modelanshgarg786Noch keine Bewertungen
- Mathematical Modelling and Position Control of Brushless DC (BLDC) MotorDokument8 SeitenMathematical Modelling and Position Control of Brushless DC (BLDC) MotorVictor FurmanNoch keine Bewertungen
- AVR194 Brushless DC Motor Control Using ATMega32M1Dokument16 SeitenAVR194 Brushless DC Motor Control Using ATMega32M1u776287Noch keine Bewertungen
- Optimal Parameters Estomation of BLDC Motor by Kohonen's Self Organizing Map Method (B. Jaganathan, Et Al)Dokument4 SeitenOptimal Parameters Estomation of BLDC Motor by Kohonen's Self Organizing Map Method (B. Jaganathan, Et Al)MarioNoch keine Bewertungen
- A Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorDokument9 SeitenA Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorMefisto ElNoch keine Bewertungen
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDokument4 SeitenHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterPidikiti Surendra BabuNoch keine Bewertungen
- Current Limitation in The Neural Speed Control of A DC MotorDokument6 SeitenCurrent Limitation in The Neural Speed Control of A DC MotorrameshhodeeeNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Socio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanDokument7 SeitenSocio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- A Proposed Framework On Working With Parents of Children With Special Needs in SingaporeDokument7 SeitenA Proposed Framework On Working With Parents of Children With Special Needs in SingaporeInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- "I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweDokument5 Seiten"I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- The Role of Extrovert and Introvert Personality in Second Language AcquisitionDokument6 SeitenThe Role of Extrovert and Introvert Personality in Second Language AcquisitionInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Attitude and Perceptions of University Students in Zimbabwe Towards HomosexualityDokument5 SeitenAttitude and Perceptions of University Students in Zimbabwe Towards HomosexualityInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Assessment of The Implementation of Federal Character in Nigeria.Dokument5 SeitenAssessment of The Implementation of Federal Character in Nigeria.International Organization of Scientific Research (IOSR)Noch keine Bewertungen
- The Impact of Technologies On Society: A ReviewDokument5 SeitenThe Impact of Technologies On Society: A ReviewInternational Organization of Scientific Research (IOSR)100% (1)
- A Review of Rural Local Government System in Zimbabwe From 1980 To 2014Dokument15 SeitenA Review of Rural Local Government System in Zimbabwe From 1980 To 2014International Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Comparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesDokument7 SeitenComparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Investigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehDokument4 SeitenInvestigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Role of Madarsa Education in Empowerment of Muslims in IndiaDokument6 SeitenRole of Madarsa Education in Empowerment of Muslims in IndiaInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Importance of Mass Media in Communicating Health Messages: An AnalysisDokument6 SeitenImportance of Mass Media in Communicating Health Messages: An AnalysisInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- An Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyDokument14 SeitenAn Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Edward Albee and His Mother Characters: An Analysis of Selected PlaysDokument5 SeitenEdward Albee and His Mother Characters: An Analysis of Selected PlaysInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Topic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshDokument7 SeitenTopic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Relationship Between Social Support and Self-Esteem of Adolescent GirlsDokument5 SeitenRelationship Between Social Support and Self-Esteem of Adolescent GirlsInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Designing of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesDokument5 SeitenDesigning of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesIOSRjournalNoch keine Bewertungen
- Educational TechnologyDokument8 SeitenEducational TechnologyMa Noemie PatayonNoch keine Bewertungen
- Indiheenbindië HerinnerdDokument194 SeitenIndiheenbindië HerinnerdKoh Nob100% (1)
- ICT Based Interventions For Anganwadi Healthcare Workers in MumbaiDokument3 SeitenICT Based Interventions For Anganwadi Healthcare Workers in MumbaiBiju ThankachanNoch keine Bewertungen
- Daily Lesson LogDokument3 SeitenDaily Lesson LogMANULNoch keine Bewertungen
- Behaviour Management: By:Ms. Ruqaiyya Fazaia Degree College, Faisal Secondary SectionDokument39 SeitenBehaviour Management: By:Ms. Ruqaiyya Fazaia Degree College, Faisal Secondary SectionProlific YouNoch keine Bewertungen
- AP Physics B - Practice Workbook 1Dokument401 SeitenAP Physics B - Practice Workbook 1JacobBigham100% (2)
- "A Date That Will Live in Infamy" - The Rhetoric Behind The SpeechDokument9 Seiten"A Date That Will Live in Infamy" - The Rhetoric Behind The SpeechRobert TaylorNoch keine Bewertungen
- NUMEROLOGYDokument2 SeitenNUMEROLOGYAnuradha GuptaNoch keine Bewertungen
- Career Assessment Inventory Standard 8Dokument13 SeitenCareer Assessment Inventory Standard 8api-254780031Noch keine Bewertungen
- Heather Miller Kuhaneck Sarah Yeaton Deb WidmanDokument15 SeitenHeather Miller Kuhaneck Sarah Yeaton Deb WidmanBill WongNoch keine Bewertungen
- 현대 국어 감정동사의 범위와 의미 특성에 대한 연구Dokument26 Seiten현대 국어 감정동사의 범위와 의미 특성에 대한 연구Jennie ImNoch keine Bewertungen
- Chapter 9, Verse 22 - Bhagavad Gita, The Song of God - Swami Mukundananda PDFDokument5 SeitenChapter 9, Verse 22 - Bhagavad Gita, The Song of God - Swami Mukundananda PDFMukul ChilwalNoch keine Bewertungen
- Business Strategy Assignment by PradipDokument7 SeitenBusiness Strategy Assignment by PradipPradip HamalNoch keine Bewertungen
- Process of Appointment of Judges in India and USAA Comparative StudyDokument54 SeitenProcess of Appointment of Judges in India and USAA Comparative StudyRachel Ann RufonNoch keine Bewertungen
- The Snowball Effect: Communication Techniques To Make You UnstoppableDokument29 SeitenThe Snowball Effect: Communication Techniques To Make You UnstoppableCapstone PublishingNoch keine Bewertungen
- Maat - Jan AssmannDokument4 SeitenMaat - Jan AssmannJulia TrimNoch keine Bewertungen
- Futurizam Po Norbertu Lintonu (Pp. 97-105)Dokument5 SeitenFuturizam Po Norbertu Lintonu (Pp. 97-105)Kraftfeld100% (1)
- GEd 109 Science Technology and Society MODULE 1 Pages 7 49Dokument43 SeitenGEd 109 Science Technology and Society MODULE 1 Pages 7 49Uvuvwewe OssasNoch keine Bewertungen
- The Three Laws of Robotics in The Age of Big Data - SSRN-id2890965Dokument45 SeitenThe Three Laws of Robotics in The Age of Big Data - SSRN-id2890965PJW9779Noch keine Bewertungen
- Transcendental Aesthetic and LogicDokument4 SeitenTranscendental Aesthetic and LogicMacner JobeNoch keine Bewertungen
- Thy WombDokument5 SeitenThy WombNoruie MagabilinNoch keine Bewertungen
- MPN 5 Tube MethodsDokument4 SeitenMPN 5 Tube Methodsnewbonchu9291Noch keine Bewertungen
- Doctrine of Basic StructureDokument25 SeitenDoctrine of Basic StructureHimanshu RajaNoch keine Bewertungen
- Marcel Detienne - The Creation of Mythology-University of Chicago Press (1986)Dokument189 SeitenMarcel Detienne - The Creation of Mythology-University of Chicago Press (1986)karen santosNoch keine Bewertungen
- Realism in English LiteratureDokument7 SeitenRealism in English LiteratureShahid AzadNoch keine Bewertungen
- 1 Number WorkDokument64 Seiten1 Number WorkGopinath KaliyaperumalNoch keine Bewertungen
- Classroom Management PlanDokument8 SeitenClassroom Management Planapi-284048516Noch keine Bewertungen
- Introduction To Philosophy NotesDokument3 SeitenIntroduction To Philosophy NotesMalkish Rajkumar0% (1)
- 1984 SummaryDokument3 Seiten1984 Summaryflorin94Noch keine Bewertungen
- 3529205Dokument4 Seiten3529205HarishNoch keine Bewertungen