Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Mercedes-Benz Despiece w202Dokument195 SeitenMercedes-Benz Despiece w202MagdalenaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- VW Passat B5 69-28 AirbagDokument40 SeitenVW Passat B5 69-28 AirbagJosé Luis Ormeño67% (3)
- Specification Jumbo Drill Sandvik DD311-40Dokument4 SeitenSpecification Jumbo Drill Sandvik DD311-40Nathania Boas E S100% (4)
- Iveco Ad380Dokument2 SeitenIveco Ad380mr.bounceNoch keine Bewertungen
- 1:1 XXX A1: Toshavi PCDokument1 Seite1:1 XXX A1: Toshavi PCsuraj dhulannavarNoch keine Bewertungen
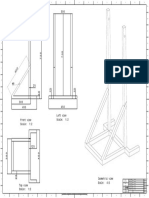
- Left View Scale: 1:2: 1:1 XXX A0Dokument1 SeiteLeft View Scale: 1:2: 1:1 XXX A0suraj dhulannavarNoch keine Bewertungen
- Wind Driven Mobile Charging of Automobile BatteryDokument7 SeitenWind Driven Mobile Charging of Automobile Batterysuraj dhulannavarNoch keine Bewertungen
- Visvesvaraya Technological University BelgaumDokument2 SeitenVisvesvaraya Technological University Belgaumsuraj dhulannavarNoch keine Bewertungen
- FrameDokument1 SeiteFramesuraj dhulannavarNoch keine Bewertungen
- M.H.Saboo Siddik PolytechnicDokument5 SeitenM.H.Saboo Siddik Polytechnicsuraj dhulannavarNoch keine Bewertungen
- FrameDokument1 SeiteFramesuraj dhulannavarNoch keine Bewertungen
- D e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N eDokument13 SeitenD e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N esuraj dhulannavarNoch keine Bewertungen
- 1:1 XXX A1: Toshavi 5/3/2016Dokument1 Seite1:1 XXX A1: Toshavi 5/3/2016suraj dhulannavarNoch keine Bewertungen
- 1:1 XXX A4: Designed By: DateDokument1 Seite1:1 XXX A4: Designed By: Datesuraj dhulannavarNoch keine Bewertungen
- 1:1 XXX A1: Designed By: DateDokument1 Seite1:1 XXX A1: Designed By: Datesuraj dhulannavarNoch keine Bewertungen
- WWW Mechengg Net 2015 09 Design and Fabrication of InjectionDokument17 SeitenWWW Mechengg Net 2015 09 Design and Fabrication of Injectionsuraj dhulannavarNoch keine Bewertungen
- 1:1 XXX A4: Toshavi 4/8/2016Dokument1 Seite1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarNoch keine Bewertungen
- PressRelease 012020 40103-IFS-KitbDokument4 SeitenPressRelease 012020 40103-IFS-KitbM2a ProductionNoch keine Bewertungen
- Brochure A35g A40g t2 en 30 20050605 ADokument20 SeitenBrochure A35g A40g t2 en 30 20050605 ADody Tri SeptianNoch keine Bewertungen
- A06 Fabia OwnersManualDokument216 SeitenA06 Fabia OwnersManualJer CotterNoch keine Bewertungen
- 2018 Renault Clio RS 18 Spec SheetDokument3 Seiten2018 Renault Clio RS 18 Spec Sheetsergio davidsNoch keine Bewertungen
- CAT 966G Serie LLDokument28 SeitenCAT 966G Serie LLCarlos Arturo AcevedoNoch keine Bewertungen
- STP133 PDFDokument5 SeitenSTP133 PDFwaleedyehiaNoch keine Bewertungen
- Volvo FH Product Guide Euro3 5 en enDokument26 SeitenVolvo FH Product Guide Euro3 5 en enYuber Ccoa100% (1)
- 60 ZVDokument274 Seiten60 ZVDedy setiawanNoch keine Bewertungen
- Automobile Engineering: Course Code:13ME1142 L TPC 4 0 0 3Dokument3 SeitenAutomobile Engineering: Course Code:13ME1142 L TPC 4 0 0 3NiranjanBandaNoch keine Bewertungen
- 493 - ssp477 Audi A1Dokument104 Seiten493 - ssp477 Audi A1yohann22100% (3)
- Automotive Chassis Components Design NotesDokument41 SeitenAutomotive Chassis Components Design Notesram sunNoch keine Bewertungen
- BAOLI Forklift KBG15-20 Operator's ManualDokument95 SeitenBAOLI Forklift KBG15-20 Operator's ManualSARAMQR100% (1)
- дачия 1304-1305-1307 пикап PDFDokument654 Seitenдачия 1304-1305-1307 пикап PDFRobert IvanNoch keine Bewertungen
- Craftsman Lawn MowerDokument56 SeitenCraftsman Lawn Mowernos218Noch keine Bewertungen
- Electric Counterbalanced Trucks Capacity 6000 - 8000 KGDokument2 SeitenElectric Counterbalanced Trucks Capacity 6000 - 8000 KGwill wuNoch keine Bewertungen
- Mechanic Motor Vehicle - CTS2.0 - NSQF-4 - 0Dokument76 SeitenMechanic Motor Vehicle - CTS2.0 - NSQF-4 - 0Pta NahiNoch keine Bewertungen
- Volvo FHDokument7 SeitenVolvo FHCristian ChiruNoch keine Bewertungen
- Defecte DirectieDokument58 SeitenDefecte DirectieGoranka Bulatovic IlicNoch keine Bewertungen
- Fay Modulmax Usa 4c MailDokument20 SeitenFay Modulmax Usa 4c MailJoabe Correia Matos Junior100% (1)
- Husky 620 (0714)Dokument8 SeitenHusky 620 (0714)gulamkasim mominNoch keine Bewertungen
- Classic Cars - October 2023 OptDokument164 SeitenClassic Cars - October 2023 OptAnkit RoyNoch keine Bewertungen
- TS 60-72 Chevy Truck Cat 09bDokument152 SeitenTS 60-72 Chevy Truck Cat 09bBlaster Web Services100% (3)
- Docslide - Us - Direccion Asistida Megane 2 PDFDokument56 SeitenDocslide - Us - Direccion Asistida Megane 2 PDFالمركز الفرنسى للرينوNoch keine Bewertungen
- Fuses GL 2008Dokument4 SeitenFuses GL 2008gtmyNoch keine Bewertungen
- 502Dokument235 Seiten502Bioaventureiro BioNoch keine Bewertungen
- Chapter 1 (Introduction To Servicing Heavy-Duty Trucks) 1-SignedDokument16 SeitenChapter 1 (Introduction To Servicing Heavy-Duty Trucks) 1-SignedZIBA KHADIBI100% (1)