Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Solid State Physics For ElectronicsDokument408 SeitenSolid State Physics For ElectronicsAlexander Price100% (4)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- General Semiconductor Products CatalogDokument695 SeitenGeneral Semiconductor Products CatalogEdd Whatley50% (2)
- Iit JeeDokument104 SeitenIit JeeEduardo Muller100% (2)
- Nontraditional Machining and Thermal Cutting Processes - Chapter 26Dokument67 SeitenNontraditional Machining and Thermal Cutting Processes - Chapter 26xharpreetxNoch keine Bewertungen
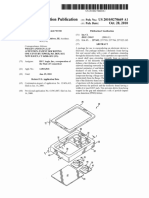
- Embedded Systems and MEMS TechnologyDokument16 SeitenEmbedded Systems and MEMS Technologyshekar493100% (1)
- Theory of ElectrolysisDokument13 SeitenTheory of ElectrolysisAdarsh ChoudharyNoch keine Bewertungen
- Biometric Encryption: E-Commerce Security Using Cryptography TechniquesDokument8 SeitenBiometric Encryption: E-Commerce Security Using Cryptography TechniquesJASH MATHEWNoch keine Bewertungen
- Assessment of The Use of National Standing Orders in The Treatment of Minor Ailments Among Community Health Practitioners in Ibadan MunicipalityDokument5 SeitenAssessment of The Use of National Standing Orders in The Treatment of Minor Ailments Among Community Health Practitioners in Ibadan MunicipalityJASH MATHEWNoch keine Bewertungen
- Nutritional Contribution of Mid-Day Meal (MDM) As Per Quantity Norms at Upper Primary Classes in DelhiDokument17 SeitenNutritional Contribution of Mid-Day Meal (MDM) As Per Quantity Norms at Upper Primary Classes in DelhiJASH MATHEWNoch keine Bewertungen
- Factors Associated With The Uptake of Cervical Cancer Screening Among Married Women in Udagangoda Grama Niladhari Division, Rathnapura District, Sri LankaDokument4 SeitenFactors Associated With The Uptake of Cervical Cancer Screening Among Married Women in Udagangoda Grama Niladhari Division, Rathnapura District, Sri LankaJASH MATHEWNoch keine Bewertungen
- Comparative Study of Two Beta - Lactamase Test Methods in Five Different Microorganisms Isolated From Azadi Hospital in Kirkuk, IraqDokument4 SeitenComparative Study of Two Beta - Lactamase Test Methods in Five Different Microorganisms Isolated From Azadi Hospital in Kirkuk, IraqJASH MATHEWNoch keine Bewertungen
- Factors Affecting Implementation of Green Procurementin Kenya: A Case Study of Coca-Cola Bottling Limited NairobiDokument5 SeitenFactors Affecting Implementation of Green Procurementin Kenya: A Case Study of Coca-Cola Bottling Limited NairobiJASH MATHEWNoch keine Bewertungen
- Ijsrp p5818 PDFDokument5 SeitenIjsrp p5818 PDFJASH MATHEWNoch keine Bewertungen
- Ijsrp p5820 PDFDokument7 SeitenIjsrp p5820 PDFJASH MATHEWNoch keine Bewertungen
- Ijsrp p5819 PDFDokument4 SeitenIjsrp p5819 PDFJASH MATHEWNoch keine Bewertungen
- Synthesis and Characterization of Ɣ-Fe 2 O 3 Nanoparticles Photo Anode by Novel Method For Dye Sensitized Solar CellDokument6 SeitenSynthesis and Characterization of Ɣ-Fe 2 O 3 Nanoparticles Photo Anode by Novel Method For Dye Sensitized Solar CellJASH MATHEWNoch keine Bewertungen
- Factors Affecting Implementation of Green Procurementin Kenya: A Case Study of Coca-Cola Bottling Limited NairobiDokument5 SeitenFactors Affecting Implementation of Green Procurementin Kenya: A Case Study of Coca-Cola Bottling Limited NairobiJASH MATHEWNoch keine Bewertungen
- Strategy To Enhance Company's Excellent Performance Case Study: PT Sakalaguna SemestaDokument8 SeitenStrategy To Enhance Company's Excellent Performance Case Study: PT Sakalaguna SemestaJASH MATHEWNoch keine Bewertungen
- Ijsrp p5816 PDFDokument8 SeitenIjsrp p5816 PDFJASH MATHEWNoch keine Bewertungen
- Advertisement Analysis: Syntactic Devices in English MagazinesDokument5 SeitenAdvertisement Analysis: Syntactic Devices in English MagazinesJASH MATHEWNoch keine Bewertungen
- F - DERIVATIONS ON BP-ALGEBRASDokument11 SeitenF - DERIVATIONS ON BP-ALGEBRASJASH MATHEWNoch keine Bewertungen
- The Role of Information and Communication Technology (ICT) and Early Warning System in School Security Based System in North Eastern NigeriaDokument5 SeitenThe Role of Information and Communication Technology (ICT) and Early Warning System in School Security Based System in North Eastern NigeriaJASH MATHEWNoch keine Bewertungen
- Analysis of Effects of Macroeconomic Variables Against Return On Agriculture StocksDokument8 SeitenAnalysis of Effects of Macroeconomic Variables Against Return On Agriculture StocksJASH MATHEWNoch keine Bewertungen
- Linkage Between Water, Sanitation and Health Outcomes:An Empirical Analysis of Indian StatesDokument10 SeitenLinkage Between Water, Sanitation and Health Outcomes:An Empirical Analysis of Indian StatesJASH MATHEWNoch keine Bewertungen
- Effect of Marketing Communications, Brand Equity, Brand Awareness Attitudes and Decision of Customers PT. Mortgage in South SulawesiDokument8 SeitenEffect of Marketing Communications, Brand Equity, Brand Awareness Attitudes and Decision of Customers PT. Mortgage in South SulawesiJASH MATHEWNoch keine Bewertungen
- Analysis of Poverty Level Fishermen Community Post Tsunami in Aceh, IndonesiaDokument7 SeitenAnalysis of Poverty Level Fishermen Community Post Tsunami in Aceh, IndonesiaJASH MATHEWNoch keine Bewertungen
- Engaging Students Through Board Games: Measuring Its Effectiveness On Academic PerformanceDokument3 SeitenEngaging Students Through Board Games: Measuring Its Effectiveness On Academic PerformanceJASH MATHEWNoch keine Bewertungen
- Molecular Characterization of Extended-Spectrum BetaLactamase (ESBLs) Genes in Pseudomonas Aeruginosa From Pregnant Women Attending A Tertiary Health Care Centre in Makurdi, Central NigeriaDokument7 SeitenMolecular Characterization of Extended-Spectrum BetaLactamase (ESBLs) Genes in Pseudomonas Aeruginosa From Pregnant Women Attending A Tertiary Health Care Centre in Makurdi, Central NigeriaJASH MATHEWNoch keine Bewertungen
- Combining Ability Analysis of Early Maturing Maize (Zea Mays.l) Inbred Lines in Central Rift Valley of EthiopiaDokument13 SeitenCombining Ability Analysis of Early Maturing Maize (Zea Mays.l) Inbred Lines in Central Rift Valley of EthiopiaJASH MATHEWNoch keine Bewertungen
- Analysis of Wage and Labor Productivity in The Hospitality IndustryDokument9 SeitenAnalysis of Wage and Labor Productivity in The Hospitality IndustryJASH MATHEWNoch keine Bewertungen
- The Shift of Focalization in James Joyce's UlyssesDokument7 SeitenThe Shift of Focalization in James Joyce's UlyssesJASH MATHEWNoch keine Bewertungen
- Value Chain Analysis, at PT. Indofood CBP SuksesMakmurTbk (Noodle DivisionDokument5 SeitenValue Chain Analysis, at PT. Indofood CBP SuksesMakmurTbk (Noodle DivisionJASH MATHEWNoch keine Bewertungen
- An Adaptive Study of Symbolic Cultural Items Used at The Nchaka Festival in Ogbaland For Textile Design of IdentityDokument16 SeitenAn Adaptive Study of Symbolic Cultural Items Used at The Nchaka Festival in Ogbaland For Textile Design of IdentityJASH MATHEWNoch keine Bewertungen
- Environmental Impact Assessment of Soil Quarrying From The Hills of Central Kerala, Southwest Coast of IndiaDokument8 SeitenEnvironmental Impact Assessment of Soil Quarrying From The Hills of Central Kerala, Southwest Coast of IndiaJASH MATHEWNoch keine Bewertungen
- Historical Landscape Quality Assessment On Priority Area of Banda Aceh Heritage City, Aceh ProvinceDokument5 SeitenHistorical Landscape Quality Assessment On Priority Area of Banda Aceh Heritage City, Aceh ProvinceJASH MATHEWNoch keine Bewertungen
- Hegemonic Masculinity and Oppression of Women in CavedwellerDokument6 SeitenHegemonic Masculinity and Oppression of Women in CavedwellerJASH MATHEWNoch keine Bewertungen
- Diodes and CapacitorsDokument35 SeitenDiodes and CapacitorsCaunhye TahibNoch keine Bewertungen
- Edc BJT CeDokument5 SeitenEdc BJT CeRavi JaiswalNoch keine Bewertungen
- Amplitude ModulationDokument10 SeitenAmplitude ModulationlakshmiNoch keine Bewertungen
- Elex 2 Prelim Exam Answer KeyDokument1 SeiteElex 2 Prelim Exam Answer KeyKim VillanuevaNoch keine Bewertungen
- ProjetDokument6 SeitenProjetAit Chaib SihamNoch keine Bewertungen
- JVC LCD Lt-19da1bj - BuDokument66 SeitenJVC LCD Lt-19da1bj - BungoclinhdtddNoch keine Bewertungen
- Itihasher Pathshalay (Moddhojug)Dokument321 SeitenItihasher Pathshalay (Moddhojug)শিবলী আহমেদNoch keine Bewertungen
- Linear Integrated Circuits Lab Viva VoceDokument8 SeitenLinear Integrated Circuits Lab Viva Voceselvi0412100% (12)
- Ceramic Sidewall Surface Mount Package Improves Thermal ConductivityDokument13 SeitenCeramic Sidewall Surface Mount Package Improves Thermal ConductivityNosfe Matingli DiazNoch keine Bewertungen
- Clippers and Clampers-3 - PPT DownloadDokument8 SeitenClippers and Clampers-3 - PPT DownloadAlejandroNoch keine Bewertungen
- GATE Transducers BookDokument12 SeitenGATE Transducers BookFaniAli100% (1)
- Oberheim OB-XA ServiceManualDokument13 SeitenOberheim OB-XA ServiceManualbitcohenNoch keine Bewertungen
- Semiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSDokument4 SeitenSemiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSAdamNoch keine Bewertungen
- APM2054N: Pin Description FeaturesDokument12 SeitenAPM2054N: Pin Description FeaturespotatoNoch keine Bewertungen
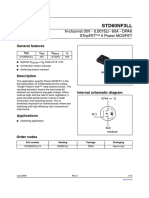
- Std60Nf3Ll: N-Channel 30V - 0.0075 - 60A - Dpak Stripfet™ Ii Power MosfetDokument13 SeitenStd60Nf3Ll: N-Channel 30V - 0.0075 - 60A - Dpak Stripfet™ Ii Power MosfetFransiskus Galih SumartonoNoch keine Bewertungen
- "Bridge B2HZ" For The Control of A DC MotorDokument16 Seiten"Bridge B2HZ" For The Control of A DC MotorhadiNoch keine Bewertungen
- Uee403 - High Voltage Engineering: University of Moratuwa, Sri LankaDokument4 SeitenUee403 - High Voltage Engineering: University of Moratuwa, Sri LankaSarinda JayasingheNoch keine Bewertungen
- MaviGard New Products May 06Dokument16 SeitenMaviGard New Products May 06Adrian OprisanNoch keine Bewertungen
- Unit-I 2Dokument22 SeitenUnit-I 2Federico AldoNoch keine Bewertungen
- STM of HOPGDokument6 SeitenSTM of HOPGSramana KunduNoch keine Bewertungen
- Using SIGA-CC2A With Supervised SpeakersDokument3 SeitenUsing SIGA-CC2A With Supervised SpeakersRaviNoch keine Bewertungen
- Substation ReportDokument23 SeitenSubstation ReportLanz de la CruzNoch keine Bewertungen
- 200961594451899Dokument8 Seiten200961594451899Mark Jay TalisayonNoch keine Bewertungen
- ES Slids Lec5 6Dokument29 SeitenES Slids Lec5 6Raja Pathamuthu.GNoch keine Bewertungen