Das könnte Ihnen auch gefallen
- TP BG - Manipulador Pelican 2 - Gonzalez, Guillermo Adrian.Dokument29 SeitenTP BG - Manipulador Pelican 2 - Gonzalez, Guillermo Adrian.Guillermo GonzalezNoch keine Bewertungen
- Ejercicio de Un Robot RRDokument4 SeitenEjercicio de Un Robot RRDiana UlloaNoch keine Bewertungen
- Paso 3 Yenny SantamariaDokument10 SeitenPaso 3 Yenny SantamariaSM GESTION Y CONSULTORIA SASNoch keine Bewertungen
- Modelamiento de Sistemas Eléctricos y MecanicosDokument23 SeitenModelamiento de Sistemas Eléctricos y MecanicosEmilyRiveraTovarNoch keine Bewertungen
- RobotDokument5 SeitenRobotsupconNoch keine Bewertungen
- Robot 2DFDokument5 SeitenRobot 2DFsupconNoch keine Bewertungen
- Lab 3 Dinámica Del Robot Del Robot MotomanDokument9 SeitenLab 3 Dinámica Del Robot Del Robot MotomanEd WaltNoch keine Bewertungen
- Paso 3 Realizar El Diseno Dinamico de Un Robot Manipulador Julian AricapaDokument5 SeitenPaso 3 Realizar El Diseno Dinamico de Un Robot Manipulador Julian AricapaSergioma GarochaNoch keine Bewertungen
- Cuaderno Fisica 2 Escalante UNMSMDokument108 SeitenCuaderno Fisica 2 Escalante UNMSMCarlos Silva EspinozaNoch keine Bewertungen
- 200 años Perú independenciaDokument45 Seiten200 años Perú independenciaEdgar Andres Cevallos RamirezNoch keine Bewertungen
- Modelos dinámicos robotDokument12 SeitenModelos dinámicos robotAnthony CardenasNoch keine Bewertungen
- Dinamica El Cuerpo Rigido 3Dokument11 SeitenDinamica El Cuerpo Rigido 3luisNoch keine Bewertungen
- Transform Ada Laplace Diferenciales Ejercicios ResueltosDokument28 SeitenTransform Ada Laplace Diferenciales Ejercicios Resueltosmaaleman1985Noch keine Bewertungen
- DInamica Pendulo DobleDokument15 SeitenDInamica Pendulo DobleSergeyIINoch keine Bewertungen
- 1PC Domiciliaria Control3Dokument17 Seiten1PC Domiciliaria Control3Mauro G. Tarazona LévanoNoch keine Bewertungen
- Cevallos Ramirez Lab03 Informe PDFDokument44 SeitenCevallos Ramirez Lab03 Informe PDFEdgar Andres Cevallos RamirezNoch keine Bewertungen
- Péndulo DobleDokument12 SeitenPéndulo DobleRaul FletcherNoch keine Bewertungen
- Taller LinealizaciónDokument7 SeitenTaller LinealizaciónDiana Paola100% (1)
- PASO 2 - Robotica Avanzada - Cristian Camilo Contreras DIazDokument12 SeitenPASO 2 - Robotica Avanzada - Cristian Camilo Contreras DIazcristian camilo contreras diazNoch keine Bewertungen
- Deber 2.1Dokument20 SeitenDeber 2.1DavidNoch keine Bewertungen
- Examen de Matemática 3Dokument7 SeitenExamen de Matemática 3acastrosabioNoch keine Bewertungen
- Lista Analiticaf5Dokument16 SeitenLista Analiticaf5LeonelFernandoArdilaPeñaNoch keine Bewertungen
- Universidad Nacional Mayor de San MarcosDokument9 SeitenUniversidad Nacional Mayor de San MarcosEstefany HinojosaNoch keine Bewertungen
- Laboratorio 1 SCDDokument7 SeitenLaboratorio 1 SCDbrayan vilela villegasNoch keine Bewertungen
- Segunda Practica Calificada Domiciliaria Control Iii Ee625-MDokument10 SeitenSegunda Practica Calificada Domiciliaria Control Iii Ee625-MJose CoronacionNoch keine Bewertungen
- Resolucion de La Practica n3 de Matematica IIIDokument25 SeitenResolucion de La Practica n3 de Matematica IIIMelanie Elena RodasNoch keine Bewertungen
- Modelo Dinamico Sistemas RoboticosDokument111 SeitenModelo Dinamico Sistemas RoboticosKyoukaSuigetsuNoch keine Bewertungen
- Formulario MatematicasDokument15 SeitenFormulario Matematicasrocady75100% (1)
- CINEMÁTICADokument10 SeitenCINEMÁTICAeugenioNoch keine Bewertungen
- Elt2692 - 2022 - 2 3PDokument8 SeitenElt2692 - 2022 - 2 3PKevin SacaNoch keine Bewertungen
- Tareas T Picos Julian Mendez Mario VargasDokument15 SeitenTareas T Picos Julian Mendez Mario VargasIsabel GilNoch keine Bewertungen
- Proyecto de Vibraciones y OndasDokument12 SeitenProyecto de Vibraciones y OndasMartin Alexander Chaves MuñozNoch keine Bewertungen
- Integrales Con Funciones TrigonometricasDokument24 SeitenIntegrales Con Funciones TrigonometricasRenzo Terrones MurgaNoch keine Bewertungen
- Trabajo DinamicaDokument7 SeitenTrabajo Dinamicaadrian chavNoch keine Bewertungen
- Ecuaciones de Movimiento Robot2gdlDokument3 SeitenEcuaciones de Movimiento Robot2gdlZen NerfeNoch keine Bewertungen
- PscinematicaDokument6 SeitenPscinematicaEgoitz AparicioNoch keine Bewertungen
- Actividad de Aprendizaje 2.1 - Rigoberto Marin - Ays de MecanismosDokument24 SeitenActividad de Aprendizaje 2.1 - Rigoberto Marin - Ays de MecanismosRIGOBERTO MARIN OVIEDONoch keine Bewertungen
- Esfuerzos en cilindros: análisis de esfuerzos y deformacionesDokument10 SeitenEsfuerzos en cilindros: análisis de esfuerzos y deformacionesCarmen HernandezNoch keine Bewertungen
- Problemas Resueltos de Dinamica de La RotacionDokument31 SeitenProblemas Resueltos de Dinamica de La RotacionLuis Carlos Valverde0% (2)
- B1 - Archivo T de LapalceA3Dokument23 SeitenB1 - Archivo T de LapalceA3Anselmo Osorio MNoch keine Bewertungen
- Ejerc1 EnergDokument14 SeitenEjerc1 EnergAlvaro Nina PintoNoch keine Bewertungen
- Pendulos AcopladosDokument9 SeitenPendulos AcopladosDaniel Parra OspinaNoch keine Bewertungen
- Controlador Cinematico Del Robot Manipulador Planar de 2GDL y 3GDLDokument8 SeitenControlador Cinematico Del Robot Manipulador Planar de 2GDL y 3GDLjuanillofcNoch keine Bewertungen
- Semana 2Dokument20 SeitenSemana 2liz karinaNoch keine Bewertungen
- Automatica Problemas ResueltosDokument355 SeitenAutomatica Problemas ResueltosAlexandro Diaz Coret0% (1)
- Formulario de MatematicasDokument14 SeitenFormulario de MatematicasPaulo ZsNoch keine Bewertungen
- Graficas de BodeDokument56 SeitenGraficas de BodeVictor Barrios AlvarezNoch keine Bewertungen
- Paso 3 - Realizar El Diseño Dinámico de Un Robot Manipulador - Julian - AricapaDokument4 SeitenPaso 3 - Realizar El Diseño Dinámico de Un Robot Manipulador - Julian - AricapaJulian AndresNoch keine Bewertungen
- SCPDDokument4 SeitenSCPDVictor Julián Fernández CarrazanaNoch keine Bewertungen
- Calculo de Las Funciones VectorialesDokument16 SeitenCalculo de Las Funciones VectorialesAMYNNXXXX100% (2)
- Examen 1Dokument8 SeitenExamen 1Miguel Angel TexocotitlaNoch keine Bewertungen
- Áreas de Figuras Planas en Coordenadas PolaresDokument25 SeitenÁreas de Figuras Planas en Coordenadas PolaresMiguel Ángel Rodríguez RomuchoNoch keine Bewertungen
- CV T3 Problemario Equipo-1Dokument16 SeitenCV T3 Problemario Equipo-1ABRAHAM JOSU� S�NCHEZ CALLEJANoch keine Bewertungen
- Formulario Matemático.Dokument3 SeitenFormulario Matemático.Omar Felipe Santiago Barajas100% (1)
- Informe Sobre Modelado e Identificación de Un Péndulo InvertidoDokument8 SeitenInforme Sobre Modelado e Identificación de Un Péndulo InvertidoGaston VilchesNoch keine Bewertungen
- Control de Robots: LIMA, 28 de Mayo de 2021Dokument11 SeitenControl de Robots: LIMA, 28 de Mayo de 2021Leo MarxialNoch keine Bewertungen
- La ecuación general de segundo grado en dos y tres variablesVon EverandLa ecuación general de segundo grado en dos y tres variablesNoch keine Bewertungen
- Geometric modeling in computer: Aided geometric designVon EverandGeometric modeling in computer: Aided geometric designNoch keine Bewertungen
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoVon EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Clase 2 PropagacionDokument32 SeitenClase 2 PropagacionJohnny EscandonNoch keine Bewertungen
- Scanning NetworkDokument30 SeitenScanning NetworkJohnny EscandonNoch keine Bewertungen
- Robot NAO - Guzman AlejandroDokument15 SeitenRobot NAO - Guzman AlejandroJohnny EscandonNoch keine Bewertungen
- Análisis MarginalDokument14 SeitenAnálisis MarginalJohnny EscandonNoch keine Bewertungen
- Procesos de Planificación de La Certificación PMP - Modulo4Dokument11 SeitenProcesos de Planificación de La Certificación PMP - Modulo4Elar Vasquez PazNoch keine Bewertungen
- Tema 3Dokument16 SeitenTema 3Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- A Se1.2Dokument45 SeitenA Se1.2Johnny EscandonNoch keine Bewertungen
- Tema 1-Introducción A La Certificación PMPDokument9 SeitenTema 1-Introducción A La Certificación PMPjose.medelNoch keine Bewertungen
- 01 1. Configuracion Básica de Un Router P47Dokument34 Seiten01 1. Configuracion Básica de Un Router P47Johnny EscandonNoch keine Bewertungen
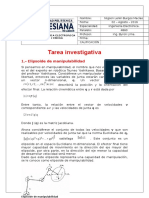
- Nigson Burgos Tarea InvestigativaDokument6 SeitenNigson Burgos Tarea InvestigativaJohnny EscandonNoch keine Bewertungen
- Elaboración Del Código Deontológico Del Ingeniero ElectronicoDokument3 SeitenElaboración Del Código Deontológico Del Ingeniero ElectronicoJohnny EscandonNoch keine Bewertungen
- Admi ProyectosDokument26 SeitenAdmi ProyectosJohnny EscandonNoch keine Bewertungen
- Tema 2Dokument8 SeitenTema 2Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- Gestion 2Dokument47 SeitenGestion 2Johnny EscandonNoch keine Bewertungen
- Antenas y Diagramas Patrones de RadiacionDokument10 SeitenAntenas y Diagramas Patrones de Radiacionmemrah2955Noch keine Bewertungen
- Tema 2Dokument8 SeitenTema 2Francisco Javier Ramirez JaramilloNoch keine Bewertungen
- Capítulo # 5 - Fibra Öptica (2)Dokument38 SeitenCapítulo # 5 - Fibra Öptica (2)Johnny EscandonNoch keine Bewertungen
- 3 Ecuaciones de BernoulliDokument5 Seiten3 Ecuaciones de BernoulliJohnny EscandonNoch keine Bewertungen
- A IntroducciónDokument89 SeitenA IntroducciónJohnny EscandonNoch keine Bewertungen
- Clase 3 - AUT-II - 2T - U PDFDokument31 SeitenClase 3 - AUT-II - 2T - U PDFJohnny EscandonNoch keine Bewertungen
- 2 Ecuaciones Diferenciales ExactasDokument9 Seiten2 Ecuaciones Diferenciales ExactasJohnny EscandonNoch keine Bewertungen
- Clase 5 Auto-II 2t-UDokument48 SeitenClase 5 Auto-II 2t-UJohnny EscandonNoch keine Bewertungen
- 3.1 Configuración de SwitchesDokument43 Seiten3.1 Configuración de SwitchesJohnny EscandonNoch keine Bewertungen
- Calculo de VLSM y Diseño de Direccionamiento BásicosDokument19 SeitenCalculo de VLSM y Diseño de Direccionamiento BásicosJohnny EscandonNoch keine Bewertungen
- PonentesDokument67 SeitenPonentesJohnny EscandonNoch keine Bewertungen
- Deber #4Dokument7 SeitenDeber #4Johnny EscandonNoch keine Bewertungen
- Teoria TallerDokument8 SeitenTeoria TallerJohnny EscandonNoch keine Bewertungen
- Expo Potencia2Dokument18 SeitenExpo Potencia2Johnny EscandonNoch keine Bewertungen
- Comunicaciones Capitulo ViDokument53 SeitenComunicaciones Capitulo ViJohnny EscandonNoch keine Bewertungen
- Autoevaluación y transferencia de aprendizajesDokument3 SeitenAutoevaluación y transferencia de aprendizajesEstefani fabiola Yrigoin piscoNoch keine Bewertungen
- FisicaDokument4 SeitenFisicaFernan DitoNoch keine Bewertungen
- Fuerza Actividad 3Dokument3 SeitenFuerza Actividad 3Andrea Coello AtahidesNoch keine Bewertungen
- 30 de Agosto 2021 MatemáticasDokument4 Seiten30 de Agosto 2021 MatemáticasJhaneth VPNoch keine Bewertungen
- Dinamica 2Dokument1 SeiteDinamica 2Verónica FraileNoch keine Bewertungen
- Guia de Movimiento PeriodicoDokument1 SeiteGuia de Movimiento PeriodicoRufina TamayoNoch keine Bewertungen
- ZatsiorskiDokument104 SeitenZatsiorskijose0% (2)
- Ejercicios de Mecánica Racional: Cinética de la partícula y sistemas mecánicosDokument3 SeitenEjercicios de Mecánica Racional: Cinética de la partícula y sistemas mecánicosChristian ValenzuelaYañez Sendero-UkNoch keine Bewertungen
- Física I - Tarea 1Dokument10 SeitenFísica I - Tarea 1Trivium MetalNoch keine Bewertungen
- Taller de Repaso 1 - Fisica II (2019-B)Dokument2 SeitenTaller de Repaso 1 - Fisica II (2019-B)Will MartNoch keine Bewertungen
- Reporte 3 QuimicaDokument30 SeitenReporte 3 QuimicaFernando YutanNoch keine Bewertungen
- 08 Lineas de Campo Electrico y Fuerza EjerciciosDokument28 Seiten08 Lineas de Campo Electrico y Fuerza EjerciciosAdriana RiveraNoch keine Bewertungen
- Balance de Masa 5Dokument36 SeitenBalance de Masa 5geraNoch keine Bewertungen
- Dinamica de Rotacion, Centro de Masa, EnergiaDokument16 SeitenDinamica de Rotacion, Centro de Masa, EnergiaDaniel Enrique Vallejo VeintimillaNoch keine Bewertungen
- Elasticidad de tejidos biológicos y conceptos de energía y trabajoDokument43 SeitenElasticidad de tejidos biológicos y conceptos de energía y trabajoJeysson Cruzado Arteaga100% (1)
- Gravedad, fuerza y presión: conceptos físicos fundamentalesDokument2 SeitenGravedad, fuerza y presión: conceptos físicos fundamentalesMartin ShastenNoch keine Bewertungen
- Matematicas Taller00b0Dokument10 SeitenMatematicas Taller00b0Richard Yabuki RedphillNoch keine Bewertungen
- Taller Leyes de NewtonDokument7 SeitenTaller Leyes de NewtonDarkLordNoch keine Bewertungen
- Movimiento armónico simple en PhETDokument18 SeitenMovimiento armónico simple en PhETjonathan ricoNoch keine Bewertungen
- Working Model 2004Dokument16 SeitenWorking Model 2004orguyo6308Noch keine Bewertungen
- Mecanica de Rocas-Parte 2Dokument76 SeitenMecanica de Rocas-Parte 2WilsonRonaldCruzadoDelaCruzNoch keine Bewertungen
- TallerDokument10 SeitenTallerMarc LopNoch keine Bewertungen
- Termodinamica Unidad 1 Fundamento Teorico PDFDokument51 SeitenTermodinamica Unidad 1 Fundamento Teorico PDFLee-hoo Transe BeeathNoch keine Bewertungen
- Fisica. Trabajo N°1. Haunau Veronica LilianaDokument6 SeitenFisica. Trabajo N°1. Haunau Veronica LilianaVictoriaNoch keine Bewertungen
- Mecanica de Fluidos - Fox - 4.71Dokument2 SeitenMecanica de Fluidos - Fox - 4.71Emmanuel FloresNoch keine Bewertungen
- Velocidad Tangencial o LinealDokument9 SeitenVelocidad Tangencial o LinealRonald Elieser Mendez CisnerosNoch keine Bewertungen
- Lectura 01 - Ensayos para Agregados y EjerciciosDokument39 SeitenLectura 01 - Ensayos para Agregados y EjerciciosArianne LeonNoch keine Bewertungen
- Redefinición Del KilogramoDokument20 SeitenRedefinición Del KilogramojapofffNoch keine Bewertungen
- Mapa de Progreso de 1° A 6° Grado de Marzo A Diciembre (Solo Comunicación y Matemática)Dokument14 SeitenMapa de Progreso de 1° A 6° Grado de Marzo A Diciembre (Solo Comunicación y Matemática)LUIS ALBERTO VERGARA ESPINOZANoch keine Bewertungen
- Formulario Resistencia de MaterialesDokument6 SeitenFormulario Resistencia de MaterialesCarlos Alfredo Huaman MaqueraNoch keine Bewertungen