Das könnte Ihnen auch gefallen
- FORMULARIO REGISTRO ÚNICO Camara de Comercio Ya Lleno PDFDokument6 SeitenFORMULARIO REGISTRO ÚNICO Camara de Comercio Ya Lleno PDFJorge Andres Afanador Porras100% (1)
- Fonema DDokument35 SeitenFonema DSamy SanNoch keine Bewertungen
- Examen de Las 250 Preguntas Derecho MercantilDokument33 SeitenExamen de Las 250 Preguntas Derecho MercantilAbraham Garcia SuchNoch keine Bewertungen
- 03 - La Fantasía de Papá - Nicolás Hyde.Dokument122 Seiten03 - La Fantasía de Papá - Nicolás Hyde.Zayra AlvarezNoch keine Bewertungen
- 1er y 2do ARTE Y CULTURA DACTILOPINTURADokument3 Seiten1er y 2do ARTE Y CULTURA DACTILOPINTURAEstefania Mamani100% (5)
- Matematica Financiera 1 IaccDokument5 SeitenMatematica Financiera 1 IaccElizabeth Valenzuela GomezNoch keine Bewertungen
- Léxico Del EcuadorDokument102 SeitenLéxico Del EcuadorNathaly Guerrero50% (2)
- Geo EstadisticaDokument144 SeitenGeo Estadisticaangel_91005405100% (1)
- Sciu-163 Actividad Entregable 003Dokument3 SeitenSciu-163 Actividad Entregable 003pablo zegarra75% (4)
- Geología e Historia de La Colisión Mesozoica de La Cordilera RealDokument3 SeitenGeología e Historia de La Colisión Mesozoica de La Cordilera RealNathaly GuerreroNoch keine Bewertungen
- Stratigrapher ESDokument20 SeitenStratigrapher ESfabiola andrea gomezNoch keine Bewertungen
- Minerales de AlteracionDokument6 SeitenMinerales de AlteracionNathaly GuerreroNoch keine Bewertungen
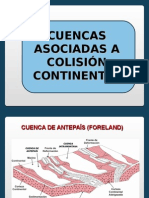
- Cuencas en Colision ContinentalDokument14 SeitenCuencas en Colision ContinentalNathaly GuerreroNoch keine Bewertungen
- Textura de Las Rocas Sedimentarias Clasticas PDFDokument101 SeitenTextura de Las Rocas Sedimentarias Clasticas PDFNathaly GuerreroNoch keine Bewertungen
- Explotacion de Yacimientos GeotermicosDokument5 SeitenExplotacion de Yacimientos GeotermicosNathaly GuerreroNoch keine Bewertungen
- Evidencia 6 Programa de Capacitacion en Comunicacion AsertivaDokument19 SeitenEvidencia 6 Programa de Capacitacion en Comunicacion AsertivaJhonny Asprilla gongoraNoch keine Bewertungen
- Unidad Educativa Jacinto CollahuazoDokument27 SeitenUnidad Educativa Jacinto Collahuazosaray05ruizNoch keine Bewertungen
- Capitulo 6, Anatomía Palpatoria Del Tobillo y Del PieDokument28 SeitenCapitulo 6, Anatomía Palpatoria Del Tobillo y Del PieDaniela Londoño JaramilloNoch keine Bewertungen
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - VIRTUAL - ANÁLISIS Y PRODUCCIÓN DEL DISCURSO CORPORATIVO - (GRUPO B01)Dokument9 SeitenEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - VIRTUAL - ANÁLISIS Y PRODUCCIÓN DEL DISCURSO CORPORATIVO - (GRUPO B01)Diana OrozcoNoch keine Bewertungen
- Actividad de Aprendizaje #01: Reflexionando Sobre El Medio Ambiente A Través Del ArteDokument3 SeitenActividad de Aprendizaje #01: Reflexionando Sobre El Medio Ambiente A Través Del ArteJOSEPH VALENTINO GOMEZ BENITESNoch keine Bewertungen
- Bitácora #26Dokument3 SeitenBitácora #26lissie ortegaNoch keine Bewertungen
- Desing ThinkingDokument15 SeitenDesing ThinkingRodrigo SaavedraNoch keine Bewertungen
- Madera Pino y Su AplicacionDokument8 SeitenMadera Pino y Su AplicacionDyan ChavezNoch keine Bewertungen
- Incoterms Cif CPT CipDokument16 SeitenIncoterms Cif CPT CipLuis Miguel Ninamango NinamangoNoch keine Bewertungen
- Historia Del FútbolDokument4 SeitenHistoria Del Fútbolhugo ferney murillo restrepoNoch keine Bewertungen
- Abscesos ApicalesDokument4 SeitenAbscesos Apicalesjoancys guevaraNoch keine Bewertungen
- Lab Lenguajes de ProgDokument28 SeitenLab Lenguajes de ProgJack LaurencioNoch keine Bewertungen
- Ejemplo de Un Sistema Producto ServicioDokument4 SeitenEjemplo de Un Sistema Producto ServicioCarolina Ramirez LeyvaNoch keine Bewertungen
- Lista de Precios 2021Dokument4 SeitenLista de Precios 2021Jose RiveroNoch keine Bewertungen
- DR800Dokument87 SeitenDR800Buenaventura Jose Huamani TalaveranoNoch keine Bewertungen
- Sistemas Operativos - CLASE 1Dokument57 SeitenSistemas Operativos - CLASE 1antoniogalvezNoch keine Bewertungen
- (Inagep) Iperc - Llimpieza Publica - Actividad Obligatoria A DesarrollarDokument6 Seiten(Inagep) Iperc - Llimpieza Publica - Actividad Obligatoria A DesarrollarARLENY PORTERONoch keine Bewertungen
- Diseño Tricimoto en RobotranDokument20 SeitenDiseño Tricimoto en RobotranMauro EspinosaNoch keine Bewertungen
- PAE Cuidados Criticos EliasDokument20 SeitenPAE Cuidados Criticos Eliasmiguelmercado08100% (1)
- DescargaDokument1 SeiteDescargaLuis Angel Santos AlmazanNoch keine Bewertungen
- Estimado SR Alessandro VialeDokument2 SeitenEstimado SR Alessandro VialeAMÉRICA AVILA RUBIONoch keine Bewertungen
- PRE QuimicaDokument9 SeitenPRE QuimicaStefany AgudeloNoch keine Bewertungen
- Análisis Costo Beneficio TerminadoDokument16 SeitenAnálisis Costo Beneficio Terminadoerika beatriz bonifaz camposNoch keine Bewertungen