Das könnte Ihnen auch gefallen
- Data Logging User GuideDokument34 SeitenData Logging User GuideAlejandro RoalcabaNoch keine Bewertungen
- Syslib rm036 - en P (P - ValveStats) PDFDokument24 SeitenSyslib rm036 - en P (P - ValveStats) PDFcarbono980Noch keine Bewertungen
- 1734 Um007 - en PDokument53 Seiten1734 Um007 - en PFadFadNoch keine Bewertungen
- (P Intlk) InstuctionDokument36 Seiten(P Intlk) Instuctioncarbono980Noch keine Bewertungen
- 3G8F7-CLK12-E3G8F7-CLK52-E3G8F7-CLK21-E Controller Link Support Boards For PCI Bus Installation GuideDokument46 Seiten3G8F7-CLK12-E3G8F7-CLK52-E3G8F7-CLK21-E Controller Link Support Boards For PCI Bus Installation GuideMD SAIFULNIZAM ABDUL HALIMNoch keine Bewertungen
- Allen Bradley Power Monitor 3000 Manual PDFDokument356 SeitenAllen Bradley Power Monitor 3000 Manual PDFAndrewcaesar100% (1)
- BPC Security GuideDokument42 SeitenBPC Security GuidePandit Katti NarahariNoch keine Bewertungen
- 20wim Um001 - en PDokument92 Seiten20wim Um001 - en PSaga_10Noch keine Bewertungen
- 1734-Vhsc24 Encoder ModuleDokument74 Seiten1734-Vhsc24 Encoder ModuleAnish ShrivastavaNoch keine Bewertungen
- System 800xa Information Management Technical Support ReferenceDokument166 SeitenSystem 800xa Information Management Technical Support ReferencePrasit Peanlerswarakul100% (1)
- Zelio Control: Reg Communication and Zeliocontrol Soft Installation User GuideDokument82 SeitenZelio Control: Reg Communication and Zeliocontrol Soft Installation User GuidechinitnNoch keine Bewertungen
- Drivelogix™ 5730 Controller: For Powerflex 700S Drives With Phase Ii ControlDokument217 SeitenDrivelogix™ 5730 Controller: For Powerflex 700S Drives With Phase Ii ControlJosmar DuqueNoch keine Bewertungen
- Aptilo SPA 81 UserManual-4Dokument59 SeitenAptilo SPA 81 UserManual-4Alvin VencedorNoch keine Bewertungen
- 20-Comm-D Devicenet Adapter: User ManualDokument256 Seiten20-Comm-D Devicenet Adapter: User ManualAnderson Rios SilvaNoch keine Bewertungen
- D2-3497 - December 2001Dokument160 SeitenD2-3497 - December 2001jesusortegavNoch keine Bewertungen
- WinCC ArchiveDokument61 SeitenWinCC ArchiveDennis CalinogNoch keine Bewertungen
- Testing Dynamic Reports: Application NoteDokument17 SeitenTesting Dynamic Reports: Application NoteViswanathan NarayananNoch keine Bewertungen
- GX Works2 Ver1 - Operating Manual (Simple Project, Function Block) SH (NA) - 080984-D (09.12)Dokument102 SeitenGX Works2 Ver1 - Operating Manual (Simple Project, Function Block) SH (NA) - 080984-D (09.12)Evandro Ortega0% (1)
- SYSLIB-RM008E (P - Reset)Dokument20 SeitenSYSLIB-RM008E (P - Reset)JOSENoch keine Bewertungen
- 3BDA035401R5105EN Interlock Viewer For AC800M PDFDokument46 Seiten3BDA035401R5105EN Interlock Viewer For AC800M PDFquangNoch keine Bewertungen
- PID Modullar ControllerDokument200 SeitenPID Modullar ControllerMohamed ElsayedNoch keine Bewertungen
- 2PAA114580-600 en System 800xa 6.0 Update ManualDokument44 Seiten2PAA114580-600 en System 800xa 6.0 Update ManualCristiam Valencia RoblesNoch keine Bewertungen
- 20comm Um002 - en PDokument168 Seiten20comm Um002 - en PchechogodoyNoch keine Bewertungen
- 1756 pm002 - en D PDFDokument103 Seiten1756 pm002 - en D PDFRangel FlavioNoch keine Bewertungen
- User Manual PDFDokument544 SeitenUser Manual PDFsoewinaungNoch keine Bewertungen
- I SHDokument92 SeitenI SHPhátTrầnNoch keine Bewertungen
- Microscan MS-3 Laser Scanner: Device Driver User GuideDokument43 SeitenMicroscan MS-3 Laser Scanner: Device Driver User GuidePavan Kumar KattimaniNoch keine Bewertungen
- 1761 Device NetDokument100 Seiten1761 Device NetJorge MontanoNoch keine Bewertungen
- Micrologix 1400 Embedded Web Server: User ManualDokument48 SeitenMicrologix 1400 Embedded Web Server: User ManualGrover Oswaldo Villarpando CalleNoch keine Bewertungen
- SYSLIB-RM041C (P - Gate)Dokument20 SeitenSYSLIB-RM041C (P - Gate)JOSENoch keine Bewertungen
- IRC5-Getting Started 3HAC021564-001, Rev D, enDokument47 SeitenIRC5-Getting Started 3HAC021564-001, Rev D, enadriano_falavinha9186Noch keine Bewertungen
- 1756-Controllogix Common Procedures Programming GuideDokument575 Seiten1756-Controllogix Common Procedures Programming GuideThanh BaronNoch keine Bewertungen
- Adjustable Frequency AC Drive: FRN 1.xxDokument114 SeitenAdjustable Frequency AC Drive: FRN 1.xxslavaphilNoch keine Bewertungen
- 1756 pm005 - en PDokument73 Seiten1756 pm005 - en PDomotica HI OlavarriaNoch keine Bewertungen
- 3BSE066174R301 A en System 800xa 6.1 Advant OCS Control Builder A 1.4 - InstallationDokument48 Seiten3BSE066174R301 A en System 800xa 6.1 Advant OCS Control Builder A 1.4 - InstallationJesus MarcanoNoch keine Bewertungen
- DigitalMachine EngineeringGuideline V2.6 ENDokument19 SeitenDigitalMachine EngineeringGuideline V2.6 ENliulixin126Noch keine Bewertungen
- Powerflex 20-Comm-P Profibus Adapter: User ManualDokument112 SeitenPowerflex 20-Comm-P Profibus Adapter: User ManualBenell ReyesNoch keine Bewertungen
- Powerflex 20-Comm-R Remote I/O Adapter: User ManualDokument128 SeitenPowerflex 20-Comm-R Remote I/O Adapter: User ManualMaria TzagarakiNoch keine Bewertungen
- 22wim Um001 - en PDokument100 Seiten22wim Um001 - en PCipriano M RogerioNoch keine Bewertungen
- FLEX I/O Frequency Input Module: Catalog Numbers 1794-IJ2, 1794-IJ2K, 1794-IJ2XT User ManualDokument87 SeitenFLEX I/O Frequency Input Module: Catalog Numbers 1794-IJ2, 1794-IJ2K, 1794-IJ2XT User Manualdaniel contrerasNoch keine Bewertungen
- Visual Lab Pro v1.15 User Manual Rev 1.22 06-11-2008Dokument329 SeitenVisual Lab Pro v1.15 User Manual Rev 1.22 06-11-2008mistakyNoch keine Bewertungen
- Ethernet 499TWD01100Dokument24 SeitenEthernet 499TWD01100gabystatrNoch keine Bewertungen
- (P Perm) AddOn InstructionDokument32 Seiten(P Perm) AddOn Instructioncarbono980Noch keine Bewertungen
- RER615 IEC101-104prot 757821 ENbDokument44 SeitenRER615 IEC101-104prot 757821 ENbAlejandro DemitiNoch keine Bewertungen
- Hardware Catalog Manager - Software Operation GuideDokument60 SeitenHardware Catalog Manager - Software Operation GuideVladNoch keine Bewertungen
- 1MRK511399-UEN - en - U - Cyber Security Deployment Guideline, 670 Series Version 2.2Dokument130 Seiten1MRK511399-UEN - en - U - Cyber Security Deployment Guideline, 670 Series Version 2.2Marcelo DiasNoch keine Bewertungen
- 3buf001135d5011 Im RNDokument56 Seiten3buf001135d5011 Im RNMohamed AbdelkaderNoch keine Bewertungen
- H8Dgi H8Dgi-F H8Dg6 H8Dg6-F: User'S ManualDokument82 SeitenH8Dgi H8Dgi-F H8Dg6 H8Dg6-F: User'S ManualOofNoch keine Bewertungen
- Open MGW SW Installation - v2Dokument50 SeitenOpen MGW SW Installation - v2Eduard LucenaNoch keine Bewertungen
- 611 AjbsDokument45 Seiten611 AjbsintermediaNoch keine Bewertungen
- Micro ComputingDokument228 SeitenMicro Computingwww.otomasyonegitimi.comNoch keine Bewertungen
- Rockwell Automation Library of Process Objects: Central Reset (P - Reset)Dokument20 SeitenRockwell Automation Library of Process Objects: Central Reset (P - Reset)NelsonNoch keine Bewertungen
- SC512Dokument70 SeitenSC512GPNoch keine Bewertungen
- b0193cw GDokument22 Seitenb0193cw GChris TysonNoch keine Bewertungen
- TLink Option Module - 750com-Um100 - En-PDokument28 SeitenTLink Option Module - 750com-Um100 - En-PVictor BonifazNoch keine Bewertungen
- LI 5645 / LI 5650: Instruction Manual (Remote Control)Dokument146 SeitenLI 5645 / LI 5650: Instruction Manual (Remote Control)Pintilie IonNoch keine Bewertungen
- System 800xa Information Management Data Access and ReportsDokument720 SeitenSystem 800xa Information Management Data Access and ReportsPrasit PeanlerswarakulNoch keine Bewertungen
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosVon EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosBewertung: 5 von 5 Sternen5/5 (1)
- Power and Performance: Software Analysis and OptimizationVon EverandPower and Performance: Software Analysis and OptimizationNoch keine Bewertungen
- CP342-5 DP Master Slave enDokument12 SeitenCP342-5 DP Master Slave enmateoNoch keine Bewertungen
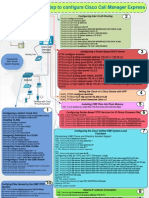
- 10 Step To Configure Cisco Call Manager ExpressDokument1 Seite10 Step To Configure Cisco Call Manager ExpressSudhir Vats100% (2)
- Imaq Vision For Labview User ManualDokument141 SeitenImaq Vision For Labview User ManualMateo QuispeNoch keine Bewertungen
- LT-1040 FX-350 Programming Manual PDFDokument48 SeitenLT-1040 FX-350 Programming Manual PDF997147088Noch keine Bewertungen
- PDFDokument22 SeitenPDFMateo QuispeNoch keine Bewertungen
- 190-lb Capacity OPL Dryer: Standard FeaturesDokument2 Seiten190-lb Capacity OPL Dryer: Standard FeaturesMateo QuispeNoch keine Bewertungen
- 7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyDokument66 Seiten7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyandresboy123Noch keine Bewertungen
- PCS7 SIMIT GS DOCU V81 enDokument69 SeitenPCS7 SIMIT GS DOCU V81 enMateo QuispeNoch keine Bewertungen
- PDFDokument48 SeitenPDFMateo Quispe100% (1)
- InfoPLC Net EIO0000001762.00 M221 Temperature ControlDokument30 SeitenInfoPLC Net EIO0000001762.00 M221 Temperature ControlMateo QuispeNoch keine Bewertungen
- Si ReferenceDokument103 SeitenSi ReferenceMateo QuispeNoch keine Bewertungen
- Service & Support: Configuration of An S7-300 CPU As DP Slave To A CP 342-5 As DP MasterDokument14 SeitenService & Support: Configuration of An S7-300 CPU As DP Slave To A CP 342-5 As DP MasterMateo QuispeNoch keine Bewertungen
- IA NT STD 2 4 Reference Guide PDFDokument75 SeitenIA NT STD 2 4 Reference Guide PDFMateo QuispeNoch keine Bewertungen
- infoPLC - Net - 20140402 RA - Eplan - Webinar - PDFDokument26 SeiteninfoPLC - Net - 20140402 RA - Eplan - Webinar - PDFJaime RamosNoch keine Bewertungen
- Modbus TCP Kopplung Doku v12 en - pdfuUUffffRLsEDokument80 SeitenModbus TCP Kopplung Doku v12 en - pdfuUUffffRLsEMateo QuispeNoch keine Bewertungen
- Datasheet SimSci DynsimCheckoutSoftware 08-10Dokument2 SeitenDatasheet SimSci DynsimCheckoutSoftware 08-10Mateo QuispeNoch keine Bewertungen
- Local Visita: EDICIÓN 431 (Del Programa 1538 Al 1540)Dokument8 SeitenLocal Visita: EDICIÓN 431 (Del Programa 1538 Al 1540)diego_11404Noch keine Bewertungen
- APC AddOns en 2Dokument48 SeitenAPC AddOns en 2Mateo QuispeNoch keine Bewertungen
- Dynsim 5.0 Getting Started: An Installation and Tutorial GuideDokument93 SeitenDynsim 5.0 Getting Started: An Installation and Tutorial GuideMateo QuispeNoch keine Bewertungen
- Operation Manual PCS7 LAB Collection 3p1 enDokument76 SeitenOperation Manual PCS7 LAB Collection 3p1 enMateo QuispeNoch keine Bewertungen
- DSP LabviewDokument25 SeitenDSP LabviewKalamchety Ravikumar SrinivasaNoch keine Bewertungen
- Process Control A First Course With MATLAB Cambridge - Series - in - Chemical - EngineeringDokument255 SeitenProcess Control A First Course With MATLAB Cambridge - Series - in - Chemical - EngineeringMateo QuispeNoch keine Bewertungen
- A Dual-Rate Model Predictive Controller For Fieldbus Based DistriDokument145 SeitenA Dual-Rate Model Predictive Controller For Fieldbus Based DistriMateo QuispeNoch keine Bewertungen
- Application For Process Automation: Configuration of Redundant I/O ModulesDokument68 SeitenApplication For Process Automation: Configuration of Redundant I/O ModulesMateo QuispeNoch keine Bewertungen
- Lab 10 Mechanical MotionDokument11 SeitenLab 10 Mechanical MotionMateo QuispeNoch keine Bewertungen
- PID Control With Gain Scheduling and PID TuningDokument42 SeitenPID Control With Gain Scheduling and PID TuningIgor RokvicNoch keine Bewertungen
- S7 WCF Blocks Supplements eDokument28 SeitenS7 WCF Blocks Supplements emrbundlezNoch keine Bewertungen
- PCS 7 Cascad ControlDokument27 SeitenPCS 7 Cascad ControlIgor RokvicNoch keine Bewertungen
- 05 06 - 103 6Dokument4 Seiten05 06 - 103 6Mateo QuispeNoch keine Bewertungen
- Oracle Linux Administrator's Guide For Release 7Dokument426 SeitenOracle Linux Administrator's Guide For Release 7Jean PhilippeauxNoch keine Bewertungen
- VirtualBox Network Settings - All You Need To KnowDokument24 SeitenVirtualBox Network Settings - All You Need To KnowquiniouNoch keine Bewertungen
- CCNA 2 (v5.1 + v6.0) Chapter 2 Exam Answers Full PDFDokument22 SeitenCCNA 2 (v5.1 + v6.0) Chapter 2 Exam Answers Full PDFSara RutkowskaNoch keine Bewertungen
- Guia de Usuario Routers Tp-link-WR840N (EU) - V5 - UGDokument120 SeitenGuia de Usuario Routers Tp-link-WR840N (EU) - V5 - UGsebas_qsryNoch keine Bewertungen
- Automatic OMCH Establishment (SRAN9.0 - 01) PDFDokument131 SeitenAutomatic OMCH Establishment (SRAN9.0 - 01) PDFriamaNoch keine Bewertungen
- Konfigurasi DHCP Pada Vlan Dengan Cisco Packet TracerDokument3 SeitenKonfigurasi DHCP Pada Vlan Dengan Cisco Packet TracerDhimas SusiloNoch keine Bewertungen
- RTK Wi-Fi Direct Programming GuideDokument9 SeitenRTK Wi-Fi Direct Programming GuidevijayNoch keine Bewertungen
- Fortigate Cookbook 52 PDFDokument513 SeitenFortigate Cookbook 52 PDFwmtNoch keine Bewertungen
- Quick Installation GuideDokument12 SeitenQuick Installation GuideJorge DiazNoch keine Bewertungen
- Wireless CommunicationDokument41 SeitenWireless CommunicationStefanoMaxentiNoch keine Bewertungen
- Troubleshoot Networks NotesDokument35 SeitenTroubleshoot Networks NotesAbdul RehmanNoch keine Bewertungen
- TCS Vmware Interview Questions1Dokument19 SeitenTCS Vmware Interview Questions1nagesh rao100% (1)
- Joshua Castromayor - 20.3.12 Lab - Troubleshoot Using Network UtilitiesDokument6 SeitenJoshua Castromayor - 20.3.12 Lab - Troubleshoot Using Network UtilitiesJoshua CastromayorNoch keine Bewertungen
- Lab Manual: (3360703) Semester - 6Dokument65 SeitenLab Manual: (3360703) Semester - 6five miner5Noch keine Bewertungen
- Huawei CloudEngine S5735-S Series Switches BrochureDokument17 SeitenHuawei CloudEngine S5735-S Series Switches BrochureAriel Guery Claure ZuritaNoch keine Bewertungen
- Wiz107sr User Manual en v1.0Dokument29 SeitenWiz107sr User Manual en v1.0Pauli Correa ArriagadaNoch keine Bewertungen
- Panasonic KX NCP Series TDE Series Feature ManualDokument416 SeitenPanasonic KX NCP Series TDE Series Feature ManualPablo MarmolNoch keine Bewertungen
- IPv 6Dokument29 SeitenIPv 6meriem hasNoch keine Bewertungen
- CCNA Exp3 - Chapter02 - Basic Switch Concepts and Configurations - DPFDokument132 SeitenCCNA Exp3 - Chapter02 - Basic Switch Concepts and Configurations - DPFhttp://heiserz.com/Noch keine Bewertungen
- SANtricity System Manager 1130 Installing and Configuring For WindowsDokument34 SeitenSANtricity System Manager 1130 Installing and Configuring For WindowsTest UserNoch keine Bewertungen
- MC Unit 3Dokument42 SeitenMC Unit 3S DivyaNoch keine Bewertungen
- CCBoot Manual - 3rd Party DHCP and TFTPDokument44 SeitenCCBoot Manual - 3rd Party DHCP and TFTPHasnan IbrahimNoch keine Bewertungen
- Ethernet PLC-5 Programmable ControllersDokument28 SeitenEthernet PLC-5 Programmable ControllersVÕ QUỐC HIỆUNoch keine Bewertungen
- SRWE - Module - 8-SLAAC and DHCPv6Dokument40 SeitenSRWE - Module - 8-SLAAC and DHCPv6hieu phamNoch keine Bewertungen
- DSEM870 CODESYS Software Manual 1Dokument38 SeitenDSEM870 CODESYS Software Manual 1Bubu RexhaNoch keine Bewertungen
- Manual Instalacion IP150 PDFDokument2 SeitenManual Instalacion IP150 PDFRudy FonsecaNoch keine Bewertungen
- OmniSwitch 9900 Modular LAN Chassis en DatasheetDokument10 SeitenOmniSwitch 9900 Modular LAN Chassis en DatasheetCristhianNoch keine Bewertungen
- Golden Capital Router AntesDokument4 SeitenGolden Capital Router Antessps_angelNoch keine Bewertungen
- DAWBEE DVB-S2 Receiver Upgrade Setup GuideDokument23 SeitenDAWBEE DVB-S2 Receiver Upgrade Setup GuideronfleurNoch keine Bewertungen
- Controller 3000 - 3500 Series ManualDokument92 SeitenController 3000 - 3500 Series Manualmlmcbride33100% (2)