Das könnte Ihnen auch gefallen
- Computational Methods for Process SimulationVon EverandComputational Methods for Process SimulationBewertung: 3 von 5 Sternen3/5 (1)
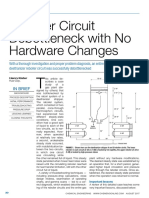
- Reboiler Circuit DebottleneckDokument8 SeitenReboiler Circuit DebottleneckstreamtNoch keine Bewertungen
- (Distillation) - Towers Malfunctions (Kister)Dokument22 Seiten(Distillation) - Towers Malfunctions (Kister)Ana Lua100% (1)
- PlantWIde McAvoyDokument19 SeitenPlantWIde McAvoydesigat4122Noch keine Bewertungen
- SIT-Excel For Chemical EngineersDokument9 SeitenSIT-Excel For Chemical EngineerskrishnaNoch keine Bewertungen
- Flooded CondensersDokument13 SeitenFlooded Condensersstreamt100% (1)
- Distillation Column Design FactorsDokument2 SeitenDistillation Column Design FactorsArunkumarNoch keine Bewertungen
- Centrifugal Compressor PDFDokument8 SeitenCentrifugal Compressor PDFSmokesoimu100% (2)
- Trol/restricted/course/fourth/course/mo Dule3-1.html: Module 3.1: Control of Distillation ColumnsDokument14 SeitenTrol/restricted/course/fourth/course/mo Dule3-1.html: Module 3.1: Control of Distillation ColumnsRimeli RoychoudhuryNoch keine Bewertungen
- Understanding Centrifugal Compressor Capacity ControlsDokument5 SeitenUnderstanding Centrifugal Compressor Capacity Controlsjuancgr77100% (1)
- Energy Analysis On A Crude Preheat TrainDokument12 SeitenEnergy Analysis On A Crude Preheat TrainVu TranNoch keine Bewertungen
- Stripping Notes PDFDokument28 SeitenStripping Notes PDFnimi khalidNoch keine Bewertungen
- Influence of Stripper Operating Parameters On The Performance of Amine II - Vacuum Stippers PDFDokument10 SeitenInfluence of Stripper Operating Parameters On The Performance of Amine II - Vacuum Stippers PDFcargscribNoch keine Bewertungen
- Thermosiphon ReboilersDokument7 SeitenThermosiphon Reboilerssj_scribd100% (1)
- Process Heat Transfer Hof MasterDokument327 SeitenProcess Heat Transfer Hof MastersdrtfgNoch keine Bewertungen
- AIChE-Condenser Performance Monitoring - 020340Dokument4 SeitenAIChE-Condenser Performance Monitoring - 020340Leon SanchezNoch keine Bewertungen
- Demethanizer OperationDokument6 SeitenDemethanizer OperationHoustonAbducteeNoch keine Bewertungen
- Heating Water by Direct Steam InjectionDokument8 SeitenHeating Water by Direct Steam InjectionsdvitkoNoch keine Bewertungen
- Control System DesignDokument26 SeitenControl System DesignChoochart Thongnark100% (1)
- Efficiency Benefits of High Performance Structured Packings: Kevin Bennett, Sulzer Chemtech Mark Pilling, Sulzer ChemtechDokument31 SeitenEfficiency Benefits of High Performance Structured Packings: Kevin Bennett, Sulzer Chemtech Mark Pilling, Sulzer Chemtechmisscolgate100% (1)
- Energy Saving in Steam Systems.Dokument34 SeitenEnergy Saving in Steam Systems.babis1980Noch keine Bewertungen
- Technip Separations PDFDokument2 SeitenTechnip Separations PDFProcess EngineerNoch keine Bewertungen
- Vacuum Pump Sizing PDFDokument1 SeiteVacuum Pump Sizing PDFLiem NguyenNoch keine Bewertungen
- Chemical Reactor Analysis and Applications for the Practicing EngineerVon EverandChemical Reactor Analysis and Applications for the Practicing EngineerNoch keine Bewertungen
- Failure of Ethylene Furnace Outlet Transfer Line Due To OverheatingDokument8 SeitenFailure of Ethylene Furnace Outlet Transfer Line Due To OverheatingRonald MesinaNoch keine Bewertungen
- P. IR. Operation PhilosophyDokument2 SeitenP. IR. Operation Philosophybesant vargheesNoch keine Bewertungen
- Designing Steam Stripping Columns For Wastewater PDFDokument5 SeitenDesigning Steam Stripping Columns For Wastewater PDFRajendraNoch keine Bewertungen
- Heat Exchangers in AspenDokument30 SeitenHeat Exchangers in AspenMicheal Brooks33% (3)
- Prediction of Centrifugal Compressor May 201234Dokument8 SeitenPrediction of Centrifugal Compressor May 201234moxlindeNoch keine Bewertungen
- Equilibrium Data - Water and Acetic Acid, Water and Methanol, and Water and EthanolDokument6 SeitenEquilibrium Data - Water and Acetic Acid, Water and Methanol, and Water and EthanolBarbara RicciNoch keine Bewertungen
- Compressor Thermodynamics Rev3Dokument28 SeitenCompressor Thermodynamics Rev3Diego1980bNoch keine Bewertungen
- Vaccum Pumps PDFDokument1 SeiteVaccum Pumps PDFarunperthNoch keine Bewertungen
- Technip Separations PDFDokument1 SeiteTechnip Separations PDFProcess EngineerNoch keine Bewertungen
- Caustic Scrubber Designs For Refinery Gases Compl PDFDokument27 SeitenCaustic Scrubber Designs For Refinery Gases Compl PDFSardeniantoNoch keine Bewertungen
- Pdvsa 2012 Kgtower-97Dokument27 SeitenPdvsa 2012 Kgtower-97Jose DavalilloNoch keine Bewertungen
- Technip Separations PDFDokument35 SeitenTechnip Separations PDFProcess EngineerNoch keine Bewertungen
- Good Practices in Tray DesignDokument7 SeitenGood Practices in Tray Designmehul10941100% (2)
- Flow MeasurementDokument113 SeitenFlow Measurementprasathesr100% (1)
- Plant Engineers Fan Design ReferenceDokument23 SeitenPlant Engineers Fan Design ReferencesatleninNoch keine Bewertungen
- Benefits of The NIST Thermo Data Engine in AspenONE EngineeringDokument12 SeitenBenefits of The NIST Thermo Data Engine in AspenONE EngineeringMohammed MorsyNoch keine Bewertungen
- Screw Compressors ReviewDokument19 SeitenScrew Compressors ReviewCarlos Maldonado AlmeidaNoch keine Bewertungen
- Process Compressors Theory - Air and GasDokument10 SeitenProcess Compressors Theory - Air and GasJay ShahNoch keine Bewertungen
- Centrifugal CompressorsDokument87 SeitenCentrifugal Compressorswarakorn6jame100% (1)
- Extractor Flowsheet Definition: - Objective - Create A Graphical FlowsheetDokument20 SeitenExtractor Flowsheet Definition: - Objective - Create A Graphical Flowsheetyoly10Noch keine Bewertungen
- Tray Distillation ColumnsDokument27 SeitenTray Distillation ColumnsRajeshkumar Elango0% (1)
- Understand The Basics of Steam Injection HeatingDokument4 SeitenUnderstand The Basics of Steam Injection HeatingBuri BurikusuNoch keine Bewertungen
- Pressure Drop Calculation in Sieve Plate Distillation ColumnDokument15 SeitenPressure Drop Calculation in Sieve Plate Distillation ColumnAnoop Kumar GuptaNoch keine Bewertungen
- Advanced Distillation Technologies: Design, Control and ApplicationsVon EverandAdvanced Distillation Technologies: Design, Control and ApplicationsNoch keine Bewertungen
- Phase Equilibrium in Mixtures: International Series of Monographs in Chemical EngineeringVon EverandPhase Equilibrium in Mixtures: International Series of Monographs in Chemical EngineeringNoch keine Bewertungen
- Data Processing and Reconciliation for Chemical Process OperationsVon EverandData Processing and Reconciliation for Chemical Process OperationsNoch keine Bewertungen
- Pump Wisdom: Problem Solving for Operators and SpecialistsVon EverandPump Wisdom: Problem Solving for Operators and SpecialistsNoch keine Bewertungen
- High Pressure Phase Behaviour of Multicomponent Fluid MixturesVon EverandHigh Pressure Phase Behaviour of Multicomponent Fluid MixturesNoch keine Bewertungen
- Fluid Flow for the Practicing Chemical EngineerVon EverandFluid Flow for the Practicing Chemical EngineerNoch keine Bewertungen
- Handbook of Thermal Conductivity, Volume 2: Organic Compounds C5 to C7Von EverandHandbook of Thermal Conductivity, Volume 2: Organic Compounds C5 to C7Noch keine Bewertungen
- Design FIR FilterDokument22 SeitenDesign FIR Filtersaran52_eceNoch keine Bewertungen
- (Aerotech) Loop Transmission - Powerful Servo Tuning FunctionDokument2 Seiten(Aerotech) Loop Transmission - Powerful Servo Tuning Functionpete manNoch keine Bewertungen
- Control Systems MCQDokument24 SeitenControl Systems MCQsundar82% (17)
- Agile Management in Activate Methodology-280622, FDokument46 SeitenAgile Management in Activate Methodology-280622, FAptWorks Solutions Private LimitedNoch keine Bewertungen
- Building Controls I - An Introduction To Building Controls PDFDokument2 SeitenBuilding Controls I - An Introduction To Building Controls PDFjacksonliNoch keine Bewertungen
- Speed Control Design For A Vehicle System Using Fuzzy LogicDokument8 SeitenSpeed Control Design For A Vehicle System Using Fuzzy LogicMileNoch keine Bewertungen
- Unit IiDokument35 SeitenUnit IiSridhar KandlaguntaNoch keine Bewertungen
- ChatGPT: A Revolutionary Human-Machine Communication TechnologyDokument3 SeitenChatGPT: A Revolutionary Human-Machine Communication TechnologyInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- William C. Reynolds, Piero Colonna - Thermodynamics - Fundamentals and Engineering Applications-Cambridge University Press (2018)Dokument421 SeitenWilliam C. Reynolds, Piero Colonna - Thermodynamics - Fundamentals and Engineering Applications-Cambridge University Press (2018)Vipul JoshiNoch keine Bewertungen
- EGM6365: Structural Optimization EGM6365: Structural OptimizationDokument9 SeitenEGM6365: Structural Optimization EGM6365: Structural OptimizationSamer ElabdNoch keine Bewertungen
- Ec8391-Control Systems Engineering-947551245-Cse QBDokument18 SeitenEc8391-Control Systems Engineering-947551245-Cse QBMr. V. Buvanesh Pandian EIE-2019-A SEC BATCHNoch keine Bewertungen
- Thi Cuối Kỳ 2 (2020-2021) Pttk Hướng Đối Tượng: Bài làm của sinh viênDokument17 SeitenThi Cuối Kỳ 2 (2020-2021) Pttk Hướng Đối Tượng: Bài làm của sinh viênVũ VươngNoch keine Bewertungen
- Impulse Response and Its Properties of Various LTI SystemsDokument5 SeitenImpulse Response and Its Properties of Various LTI SystemsCangkang SainsNoch keine Bewertungen
- Mamdani SugenoDokument34 SeitenMamdani SugenoNoormalita Irviana100% (1)
- City Out of Chaos PDFDokument178 SeitenCity Out of Chaos PDFgromdrakulaNoch keine Bewertungen
- Extended Family Relationships - How They Impact The Mental HealthDokument64 SeitenExtended Family Relationships - How They Impact The Mental HealthHanabusa Kawaii IdouNoch keine Bewertungen
- SimulationDokument8 SeitenSimulationSatya SundarayyaNoch keine Bewertungen
- Goal 4Dokument7 SeitenGoal 4NirmitNoch keine Bewertungen
- DSS ModelingDokument13 SeitenDSS ModelingS.m. ShadabNoch keine Bewertungen
- A Study of Followers Under Transformational LeadershipDokument204 SeitenA Study of Followers Under Transformational LeadershipYouns TahirNoch keine Bewertungen
- Thermodynamics: Latent Heat Sensible Heat EntropyDokument8 SeitenThermodynamics: Latent Heat Sensible Heat EntropySoumyadip RoyNoch keine Bewertungen
- Statistical Molecular Thermodynamics: Christopher J. CramerDokument7 SeitenStatistical Molecular Thermodynamics: Christopher J. CramerLuciano Sánchez AramburuNoch keine Bewertungen
- Prototype and Spiral ModelDokument6 SeitenPrototype and Spiral ModelrajeshNoch keine Bewertungen
- SIMCET PID Tuning Training Simulator 2019Dokument31 SeitenSIMCET PID Tuning Training Simulator 2019monikaklier100% (1)
- Bloch PDFDokument66 SeitenBloch PDFAshish_Singh_5126Noch keine Bewertungen
- Signals and Systems-I PDFDokument94 SeitenSignals and Systems-I PDFAnusha BaduguNoch keine Bewertungen
- Introduction To Tutorial Software Requirements EngineeringDokument2 SeitenIntroduction To Tutorial Software Requirements EngineeringCarlos CamargoNoch keine Bewertungen
- Literature Survey On Autonomous Driving CarDokument5 SeitenLiterature Survey On Autonomous Driving CarSaikhlum J NarzaryNoch keine Bewertungen
- Apqp Activities MatrixDokument7 SeitenApqp Activities MatrixPk Nimiwal100% (1)