Das könnte Ihnen auch gefallen
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDokument3 SeitenExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNoch keine Bewertungen
- Wound Rotor Induction MotorDokument4 SeitenWound Rotor Induction MotorAnonymous zeISoBNoch keine Bewertungen
- Electrical Machines IDokument15 SeitenElectrical Machines Imepco10050% (4)
- TYPES OF FIELD EFFECT TRANSISTORSDokument3 SeitenTYPES OF FIELD EFFECT TRANSISTORSHemant SaraswatNoch keine Bewertungen
- Three-Phase Alternator Voltage RegulationDokument8 SeitenThree-Phase Alternator Voltage RegulationarjayNoch keine Bewertungen
- EE6512-Electrical Machines LaboratoryDokument82 SeitenEE6512-Electrical Machines LaboratoryGopinath B L NaiduNoch keine Bewertungen
- Three Phase Alternator SynchorinizingDokument11 SeitenThree Phase Alternator SynchorinizingSud JoshNoch keine Bewertungen
- Field Effect Transistors (FETs)Dokument58 SeitenField Effect Transistors (FETs)ksreddy2002100% (1)
- Wound Rotor MotorDokument6 SeitenWound Rotor MotorArun KumarNoch keine Bewertungen
- Synchronous and Slip-Ring Rotor Machines CourseDokument87 SeitenSynchronous and Slip-Ring Rotor Machines CourseHaryo Probo100% (1)
- Lab 13 - Wound Rotor Induction MotorDokument6 SeitenLab 13 - Wound Rotor Induction MotorJeth MadriagaNoch keine Bewertungen
- No Load and Block Rotor Tests for 3-Phase Induction MotorDokument11 SeitenNo Load and Block Rotor Tests for 3-Phase Induction MotorKsr Akhil100% (1)
- Lab 3 Squirrel Cage Induction Machine-1Dokument8 SeitenLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Wound Rotor Induction MotorDokument4 SeitenWound Rotor Induction MotorA M Fadly FajarNoch keine Bewertungen
- Methods of Starting of Synchronous Motor - BravoDokument4 SeitenMethods of Starting of Synchronous Motor - Bravocrresoso957100% (2)
- E9 The Synchronous MotorDokument10 SeitenE9 The Synchronous Motorlucas100% (1)
- Phasor DiagramDokument10 SeitenPhasor Diagram10rodriguezNoch keine Bewertungen
- Induction Motors Guide for Farm ApplicationsDokument9 SeitenInduction Motors Guide for Farm ApplicationsramfalNoch keine Bewertungen
- E1 Squirrel Cage Induction MotorDokument13 SeitenE1 Squirrel Cage Induction MotorFitri VongolaNoch keine Bewertungen
- Handbook ArranqueDokument18 SeitenHandbook ArranqueChristian EchavarriaNoch keine Bewertungen
- Performance Analysis of Three Phase Induction Motor Under Balance & Unbalance Voltage ConditionsDokument5 SeitenPerformance Analysis of Three Phase Induction Motor Under Balance & Unbalance Voltage ConditionsAishwarya RaiNoch keine Bewertungen
- Power Electronics Lab Manual PDFDokument41 SeitenPower Electronics Lab Manual PDFSudhakar MarojuNoch keine Bewertungen
- What Is The Use of Choke in Florescent TubesDokument7 SeitenWhat Is The Use of Choke in Florescent Tubessumanta1981100% (2)
- Experiment No.3Dokument6 SeitenExperiment No.3justinepunzalan250% (1)
- Induction Machine ReportDokument24 SeitenInduction Machine ReportSiddharth NandhanNoch keine Bewertungen
- Transformer Unit 1 PDFDokument27 SeitenTransformer Unit 1 PDFtinkudhullNoch keine Bewertungen
- Wound Rotor Induction MotorDokument38 SeitenWound Rotor Induction Motorshivamruth24983% (6)
- INSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSDokument59 SeitenINSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSMichael HailuNoch keine Bewertungen
- PX7203-Special Electrical Machines PDFDokument11 SeitenPX7203-Special Electrical Machines PDFvaishnavisriNoch keine Bewertungen
- Induction Generator Operation and ApplicationsDokument4 SeitenInduction Generator Operation and ApplicationsAaryanNoch keine Bewertungen
- Difference Between Single Phase Wiring and Three Phase (Latest)Dokument14 SeitenDifference Between Single Phase Wiring and Three Phase (Latest)shumwenjunNoch keine Bewertungen
- D C Machines-IntroductionDokument25 SeitenD C Machines-Introductionprashanth6876050% (2)
- TransducersDokument40 SeitenTransducersFemi PrinceNoch keine Bewertungen
- EM-III Lab DEE C20 Front PagesDokument30 SeitenEM-III Lab DEE C20 Front PagesHarimadhavareddy YenireddyNoch keine Bewertungen
- 1 Automatic Water Level ControllerDokument6 Seiten1 Automatic Water Level ControllerMarcio Manoel da SilvaNoch keine Bewertungen
- Measure AC Voltages Using an AC PotentiometerDokument3 SeitenMeasure AC Voltages Using an AC PotentiometerNh Chuminda Yapa100% (1)
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDokument13 SeitenThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimNoch keine Bewertungen
- Common Base Transistor ProjectDokument5 SeitenCommon Base Transistor ProjectNihanth Charan50% (12)
- IC 7805 voltage regulatorDokument3 SeitenIC 7805 voltage regulatorNilabha DasNoch keine Bewertungen
- DC Generator Magnetization CurveDokument5 SeitenDC Generator Magnetization CurveM Kumar MarimuthuNoch keine Bewertungen
- Light-Emitting and Zener Diode CharacteristicsDokument15 SeitenLight-Emitting and Zener Diode Characteristicskyle vicenteNoch keine Bewertungen
- Ch-1 Fundamentals of Alternating Voltage & CurrentDokument25 SeitenCh-1 Fundamentals of Alternating Voltage & CurrenttrojansujitNoch keine Bewertungen
- University Institute of Engineering Department Au-1Dokument40 SeitenUniversity Institute of Engineering Department Au-1Manveer SinghNoch keine Bewertungen
- Hunting in Synchronous Motor - Electrical4u PDFDokument5 SeitenHunting in Synchronous Motor - Electrical4u PDFRishiSunariya0% (1)
- Shaded Pole Induction Motor PresentationDokument20 SeitenShaded Pole Induction Motor PresentationKalpesh SalunkheNoch keine Bewertungen
- Squirrel Cage Induction MotorDokument57 SeitenSquirrel Cage Induction MotorJosue' Gonzalez100% (1)
- 2021-02 PEE Online ExaminationsDokument4 Seiten2021-02 PEE Online ExaminationsFerdinand Ramos EspirituNoch keine Bewertungen
- Synchronous Motor Types and OperationDokument14 SeitenSynchronous Motor Types and OperationVishnu Nayak100% (1)
- Chapter 6 Induction Motor ConstructionDokument42 SeitenChapter 6 Induction Motor Constructionupendra35Noch keine Bewertungen
- Basic Motor Control GuideDokument17 SeitenBasic Motor Control GuideHeizen BulanNoch keine Bewertungen
- Magenetic Chip Collector New 2Dokument27 SeitenMagenetic Chip Collector New 2Hemasundar Reddy JolluNoch keine Bewertungen
- 3 Point Starter Working Principle & ConstructionDokument6 Seiten3 Point Starter Working Principle & ConstructionsuryavigneNoch keine Bewertungen
- Lab 1 - RL CircuitsDokument4 SeitenLab 1 - RL Circuitsstevens32100% (1)
- Three-Phase Transformers ExperimentDokument11 SeitenThree-Phase Transformers ExperimentAbdulrahman Aldeek0% (1)
- Introduction To Induction Motor: Experiment 11Dokument4 SeitenIntroduction To Induction Motor: Experiment 11Apna VeerNoch keine Bewertungen
- History: Electric Motor Alternating Current Stator RotorDokument14 SeitenHistory: Electric Motor Alternating Current Stator RotorManas NagNoch keine Bewertungen
- AC Motor WikipediaDokument10 SeitenAC Motor WikipediasmeenaNoch keine Bewertungen
- AC MotorDokument22 SeitenAC MotorMoise CristinaNoch keine Bewertungen
- Induction Motor: This Article Does NotDokument24 SeitenInduction Motor: This Article Does Notyashraj786100% (1)
- AC MotorDokument22 SeitenAC MotorRavindar_Singh0% (1)
- Powerful and Durable: Engine Powered Lift Trucks 6.0 - 10.0 TonnesDokument6 SeitenPowerful and Durable: Engine Powered Lift Trucks 6.0 - 10.0 TonnesRoberto RodríguezNoch keine Bewertungen
- Portfolio in TleDokument16 SeitenPortfolio in TleAileen Javines50% (2)
- Fits and Clearances - Contents: Propeller Maintenance Manual 132ADokument8 SeitenFits and Clearances - Contents: Propeller Maintenance Manual 132AAlexis KidemaNoch keine Bewertungen
- Technical Hager PDFDokument32 SeitenTechnical Hager PDFjohnvar04Noch keine Bewertungen
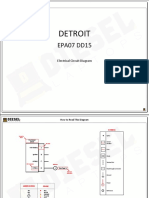
- Detroit - DD15 EPA07 (2007-09) .Engine WiringDokument9 SeitenDetroit - DD15 EPA07 (2007-09) .Engine Wiringroberto martir100% (6)
- Chipping and Filing Metal WorksDokument14 SeitenChipping and Filing Metal WorksDumaquit Ara LouiseNoch keine Bewertungen
- Radiator Connection MethodsDokument1 SeiteRadiator Connection Methodsgox458Noch keine Bewertungen
- B-64603en - 01 - 0if Connection Manual (Hardware)Dokument484 SeitenB-64603en - 01 - 0if Connection Manual (Hardware)SergioNoch keine Bewertungen
- Practical Physics (Part-II)Dokument66 SeitenPractical Physics (Part-II)Raju SinghNoch keine Bewertungen
- Catalogue of Fog Misting SystemDokument18 SeitenCatalogue of Fog Misting SystemwapanchoNoch keine Bewertungen
- Postflood Restartprocedure HOFFMAN LAMSONDokument1 SeitePostflood Restartprocedure HOFFMAN LAMSONLuis Fernando BravoNoch keine Bewertungen
- BUSBAR PROTECTION PANELDokument33 SeitenBUSBAR PROTECTION PANELprati121Noch keine Bewertungen
- SHE - NGTS 2.1 - SubstationsDokument27 SeitenSHE - NGTS 2.1 - SubstationsandcrisdanmatNoch keine Bewertungen
- CDHD2 ECT CAN fw2.15.x Rev.1.0 PDFDokument499 SeitenCDHD2 ECT CAN fw2.15.x Rev.1.0 PDFDon BozarthNoch keine Bewertungen
- L21 TemperatureDokument17 SeitenL21 Temperaturebaraniinst6875Noch keine Bewertungen
- 6 Operate Main and Auxiliary Machinery and Associated Control SystemsDokument5 Seiten6 Operate Main and Auxiliary Machinery and Associated Control SystemsridhoNoch keine Bewertungen
- Installation of IsolatorsDokument12 SeitenInstallation of IsolatorsBandaru Ananth NaiduNoch keine Bewertungen
- Department of Electrical Engineering: UART - Libraries and Servo ObjectivesDokument3 SeitenDepartment of Electrical Engineering: UART - Libraries and Servo ObjectivesJohn Louie TapecNoch keine Bewertungen
- Mfge09l 1Dokument6 SeitenMfge09l 1Joseph ZamoraNoch keine Bewertungen
- P Series Strain GaugesDokument1 SeiteP Series Strain Gaugesjbmune6683Noch keine Bewertungen
- Master Ride 150 Manual de Serviços (Ingles) TRES150 PDFDokument255 SeitenMaster Ride 150 Manual de Serviços (Ingles) TRES150 PDFCharles SaraivaNoch keine Bewertungen
- UT58D Eng ManualDokument34 SeitenUT58D Eng ManualkalizamNoch keine Bewertungen
- 2017 BMW R Ninet Scrambler 71662Dokument163 Seiten2017 BMW R Ninet Scrambler 71662Anas KhanNoch keine Bewertungen
- Electric Submersible Pumps GuideDokument22 SeitenElectric Submersible Pumps GuideDanteNoch keine Bewertungen
- Steca PV Off Grid Catalogue 2014-2015 enDokument39 SeitenSteca PV Off Grid Catalogue 2014-2015 entunznathNoch keine Bewertungen
- Rečnik Srpsko-EngleskiDokument9 SeitenRečnik Srpsko-EngleskisreckoNoch keine Bewertungen
- Parallel Parking InstructionsDokument5 SeitenParallel Parking Instructionsbra9tee9tiniNoch keine Bewertungen
- Psmaitrey DSP - VI UNIT PDFDokument24 SeitenPsmaitrey DSP - VI UNIT PDFSatya KrishnaNoch keine Bewertungen
- Shimano-Nexus - Inter-7 Freewheel Speed HubDokument12 SeitenShimano-Nexus - Inter-7 Freewheel Speed HubliubertNoch keine Bewertungen