Das könnte Ihnen auch gefallen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Stepper MotorDokument3 SeitenStepper Motormpkkbtech100% (1)
- Stepper Motor InterfacingDokument5 SeitenStepper Motor InterfacingShobanraj Letchumanan100% (1)
- USB To RS232 Using Atmel ATtiny2313 or ATmega8Dokument4 SeitenUSB To RS232 Using Atmel ATtiny2313 or ATmega8Nugraha Indrawan100% (2)
- Generating PWM With PIC Microcontroller - MikroC ProDokument3 SeitenGenerating PWM With PIC Microcontroller - MikroC Proemilfrancu100% (1)
- PWM Using Ic555Dokument1 SeitePWM Using Ic555Sachin Arora100% (1)
- Voltage StabilizerDokument5 SeitenVoltage Stabilizersqh_uetNoch keine Bewertungen
- Eeeb371 Pic Exp6newDokument7 SeitenEeeb371 Pic Exp6newSalemAbaad100% (2)
- 8051 Project LCD InterfacingDokument7 Seiten8051 Project LCD InterfacingShailesh Sankdasariya100% (5)
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDokument9 SeitenFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNoch keine Bewertungen
- The Seven Segment DisplayDokument5 SeitenThe Seven Segment DisplayTewodros Kassahun100% (2)
- AC Drives and Soft Starter Application Guide - AllenBradleyCoDokument5 SeitenAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- Controlling LED Matrices With The MBI5026 DriverDokument9 SeitenControlling LED Matrices With The MBI5026 DriverLaurentiu Iacob100% (1)
- Zero CrossingDokument16 SeitenZero CrossingAryan KapsNoch keine Bewertungen
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Dokument51 SeitenProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNoch keine Bewertungen
- Implementing A Bootloader For The PIC16F87X: OperationDokument24 SeitenImplementing A Bootloader For The PIC16F87X: Operationboslim1580100% (1)
- Isolated Power Supply 30wDokument43 SeitenIsolated Power Supply 30wchinnadurai20006034100% (1)
- Chapter 5 - DC - Ac Converter (Part A)Dokument29 SeitenChapter 5 - DC - Ac Converter (Part A)andersonNoch keine Bewertungen
- 19v From A Car BatteryDokument4 Seiten19v From A Car Batterysafet100% (1)
- Oscillators Module 02Dokument20 SeitenOscillators Module 02ervaishu5342100% (1)
- I2C Adapter For 1602 and 2004 LCD Displays - ENDokument27 SeitenI2C Adapter For 1602 and 2004 LCD Displays - ENharm ?100% (1)
- Driver Circuits - PowerGuru - Power Electronics Information PortalDokument5 SeitenDriver Circuits - PowerGuru - Power Electronics Information PortaldevchandarNoch keine Bewertungen
- Motor StepperDokument4 SeitenMotor Stepperfavour ukpai100% (1)
- Basics of The Communication ProtocolDokument19 SeitenBasics of The Communication ProtocolNEETHU PRAKASH100% (1)
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakDokument28 SeitenZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrNoch keine Bewertungen
- Contents: Diac Triac Other Types of ThyristorDokument24 SeitenContents: Diac Triac Other Types of ThyristorKharol A. Bautista100% (1)
- 1.2 Block Diagram With Explanation:: Chapter-1Dokument27 Seiten1.2 Block Diagram With Explanation:: Chapter-1SAMEULNoch keine Bewertungen
- Develop Ineo-250 Error C2557Dokument2 SeitenDevelop Ineo-250 Error C2557Tariq MajeedNoch keine Bewertungen
- Activity 3 in Industrial ElectronicsDokument15 SeitenActivity 3 in Industrial ElectronicsFrancis Valdez Lopez100% (1)
- AVR Hardware Design ConsiderationsDokument14 SeitenAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsDokument51 SeitenThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- Digital Control of Switching Power ConvertersDokument6 SeitenDigital Control of Switching Power ConvertersNISHANT VATSNoch keine Bewertungen
- Digital Power Suply ControlDokument30 SeitenDigital Power Suply ControlPaul RomanNoch keine Bewertungen
- Digital Power-Conversion For The Analog EngineerDokument12 SeitenDigital Power-Conversion For The Analog EngineerfjwoemcuNoch keine Bewertungen
- Wind Turbine MPPT Regulator v2.3 120120Dokument36 SeitenWind Turbine MPPT Regulator v2.3 120120EdwinDuranJr.100% (1)
- 555 TimerDokument76 Seiten555 TimerSai Krishna KodaliNoch keine Bewertungen
- PWMDokument16 SeitenPWMRICHIHOTS2100% (2)
- Lab11 CountersDokument6 SeitenLab11 Countersjocansino4496100% (1)
- LECTURE 27 (Ch. 11) Ac Voltage Controllers: ECE 452 Power ElectronicsDokument15 SeitenLECTURE 27 (Ch. 11) Ac Voltage Controllers: ECE 452 Power ElectronicsSumukha KumarNoch keine Bewertungen
- PIC16f877a TimerDokument9 SeitenPIC16f877a Timerjohn moron100% (2)
- DC Motor Direction Control Using L293d (H Bridge)Dokument5 SeitenDC Motor Direction Control Using L293d (H Bridge)Syed Aameer100% (1)
- Duo Range Type PotentiometerDokument19 SeitenDuo Range Type Potentiometersaikarthick023Noch keine Bewertungen
- Steady State Converter Analysis: Anjana S Ap, EeeDokument23 SeitenSteady State Converter Analysis: Anjana S Ap, Eeemridul mpNoch keine Bewertungen
- Plecs Tl431Dokument11 SeitenPlecs Tl431khsniper100% (1)
- Timers Programming in AVR Microcontrollers Using AssemblyDokument19 SeitenTimers Programming in AVR Microcontrollers Using Assemblymahmoud100% (2)
- Design and Micro Controller Implementation of A Three Phase SCR Power ConverterDokument8 SeitenDesign and Micro Controller Implementation of A Three Phase SCR Power ConverterIsmael Ochoa JimenezNoch keine Bewertungen
- Slis 140 ADokument33 SeitenSlis 140 AAlvaro RoqueNoch keine Bewertungen
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Dokument7 SeitenHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
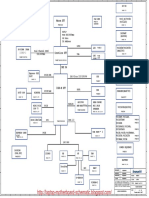
- x300 SchematicsDokument99 Seitenx300 SchematicsWondmagegn Abera DiresNoch keine Bewertungen
- AVR Motor Control PDFDokument15 SeitenAVR Motor Control PDFjp149100% (1)
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- By Marl Us: Lighting The Right To TheDokument7 SeitenBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- What Is The Difference Between Microcontrollers and 8051Dokument6 SeitenWhat Is The Difference Between Microcontrollers and 8051Erandi Brito100% (1)
- LCD Display 16x02 - 20x04 Allinone ENDokument44 SeitenLCD Display 16x02 - 20x04 Allinone ENcmdi100% (1)
- Guia Basica de Ejercicios-ProtonDokument59 SeitenGuia Basica de Ejercicios-ProtonFatality Joseph100% (1)
- History of The I2C BusDokument24 SeitenHistory of The I2C BusManoj Kavedia100% (1)
- Analog Devices CD ReferenceDokument8 SeitenAnalog Devices CD ReferenceAcody Ie SyNoch keine Bewertungen
- String InstructionsDokument7 SeitenString InstructionsManoj Kavedia100% (1)
- Motion Control ReportVon EverandMotion Control ReportBewertung: 4 von 5 Sternen4/5 (1)
- 12-1 p76 NXP Partial Net PDFDokument4 Seiten12-1 p76 NXP Partial Net PDFChakkaravarthiErNoch keine Bewertungen
- Technical Data SheetDokument16 SeitenTechnical Data SheetChakkaravarthiEr100% (1)
- Macro (Computer Science) - Wikipedia, The Free EncyclopediaDokument6 SeitenMacro (Computer Science) - Wikipedia, The Free EncyclopediaChakkaravarthiErNoch keine Bewertungen
- I2C Info - I2C Bus, Interface and ProtocolDokument2 SeitenI2C Info - I2C Bus, Interface and ProtocolChakkaravarthiErNoch keine Bewertungen
- IntroDokument17 SeitenIntroChakkaravarthiErNoch keine Bewertungen
- Java PrintingDokument1 SeiteJava PrintingChakkaravarthiErNoch keine Bewertungen
- Misra C 2004Dokument4 SeitenMisra C 2004ChakkaravarthiErNoch keine Bewertungen
- Asian RegionalismDokument15 SeitenAsian RegionalismLiezel AalaNoch keine Bewertungen
- Ielts Reading Actual Tests With Suggested Answers Oct 2021 JDokument508 SeitenIelts Reading Actual Tests With Suggested Answers Oct 2021 JHarpreet Singh JohalNoch keine Bewertungen
- The Senior High School in The Phillipines: The Way To The WorldDokument5 SeitenThe Senior High School in The Phillipines: The Way To The WorldRodel Ramos DaquioagNoch keine Bewertungen
- Two Occult Philosophers in The Elizabethan Age: by Peter ForshawDokument10 SeitenTwo Occult Philosophers in The Elizabethan Age: by Peter ForshawFrancesco VinciguerraNoch keine Bewertungen
- NBCC 2015 Seismic Design Examples in S-FRAME AnalysisDokument91 SeitenNBCC 2015 Seismic Design Examples in S-FRAME AnalysisMike Smith100% (1)
- Ashfaque Ahmed-The SAP Materials Management Handbook-Auerbach Publications, CRC Press (2014)Dokument36 SeitenAshfaque Ahmed-The SAP Materials Management Handbook-Auerbach Publications, CRC Press (2014)surajnayak77Noch keine Bewertungen
- Anansi and His Six Sons An African MythDokument3 SeitenAnansi and His Six Sons An African MythShar Nur JeanNoch keine Bewertungen
- Assignment On Unstable or Astatic Gravimeters and Marine Gravity SurveyDokument9 SeitenAssignment On Unstable or Astatic Gravimeters and Marine Gravity Surveyraian islam100% (1)
- Paper 1 Set 2 PDFDokument531 SeitenPaper 1 Set 2 PDFabdul rehman aNoch keine Bewertungen
- Primefaces Users Guide 3 5cDokument497 SeitenPrimefaces Users Guide 3 5calvarolucasNoch keine Bewertungen
- Factsheet AMRT 2023 01Dokument4 SeitenFactsheet AMRT 2023 01arsyil1453Noch keine Bewertungen
- RTRT User GuideDokument324 SeitenRTRT User GuideAlae Khaoua100% (3)
- Test Bank For Body Structures and Functions 11th Edition Ann ScottDokument27 SeitenTest Bank For Body Structures and Functions 11th Edition Ann Scottpellucidutter.uka6lr100% (38)
- Enable Modern Authentication in Exchange OnlineDokument2 SeitenEnable Modern Authentication in Exchange Onlinedan.artimon2791Noch keine Bewertungen
- Solutions For Tutorial Exercises Association Rule Mining.: Exercise 1. AprioriDokument5 SeitenSolutions For Tutorial Exercises Association Rule Mining.: Exercise 1. AprioriMarkib Singh AdawitahkNoch keine Bewertungen
- Test Iii Cultural Social and Political OrganizationDokument2 SeitenTest Iii Cultural Social and Political OrganizationTin NatayNoch keine Bewertungen
- Simulation of 1,3-Butadiene Extractive Distillation Process Using N-Methyl-2-Pyrrolidone SolventDokument7 SeitenSimulation of 1,3-Butadiene Extractive Distillation Process Using N-Methyl-2-Pyrrolidone SolventAA0809Noch keine Bewertungen
- 4040 SERIES: Hinge (Pull Side) (Shown) Top Jamb (Push Side) Parallel Arm (Push Side)Dokument11 Seiten4040 SERIES: Hinge (Pull Side) (Shown) Top Jamb (Push Side) Parallel Arm (Push Side)Melrose FabianNoch keine Bewertungen
- Bluesil Ep 150 A3: Insulator Grade Silicone RubberDokument2 SeitenBluesil Ep 150 A3: Insulator Grade Silicone RubberNagendra KumarNoch keine Bewertungen
- KRPL Shahjahanpur Check List For Arc Welding MachineDokument1 SeiteKRPL Shahjahanpur Check List For Arc Welding MachineA S YadavNoch keine Bewertungen
- Language Loss in Waray: Ni Voltaire Q. UyzonDokument23 SeitenLanguage Loss in Waray: Ni Voltaire Q. UyzonMary Rose OmbrogNoch keine Bewertungen
- Only Great Minds Can Read This Based On Cambridge University StudyDokument7 SeitenOnly Great Minds Can Read This Based On Cambridge University StudyabotNoch keine Bewertungen
- IAU Logbook Core 6weeksDokument7 SeitenIAU Logbook Core 6weeksbajariaaNoch keine Bewertungen
- Accenture MockDokument1 SeiteAccenture Mockrajyogesh487Noch keine Bewertungen
- Ericsson AXE 810: Switch (ROTD)Dokument4 SeitenEricsson AXE 810: Switch (ROTD)Kao Sun HoNoch keine Bewertungen
- Cisco Nexus 7000 Introduction To NX-OS Lab GuideDokument38 SeitenCisco Nexus 7000 Introduction To NX-OS Lab Guiderazzzzzzzzzzz100% (1)
- IO5 Future Skills Foresight 2030 ReportDokument96 SeitenIO5 Future Skills Foresight 2030 ReportjuliavalleNoch keine Bewertungen
- Structural Engineering Formulas Second EditionDokument224 SeitenStructural Engineering Formulas Second Editionahmed_60709595194% (33)
- Text Descriptive Tentang HewanDokument15 SeitenText Descriptive Tentang HewanHAPPY ARIFIANTONoch keine Bewertungen