Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Kettlebell ManualDokument37 SeitenKettlebell ManualJoe Taylor-Ferguson93% (14)
- Physical Fitness and WellnessDokument10 SeitenPhysical Fitness and WellnessJoycel MerdegiaNoch keine Bewertungen
- Nursery Dolphin Week 2Dokument2 SeitenNursery Dolphin Week 2rarapucinoNoch keine Bewertungen
- Fitness Test ProceduresDokument5 SeitenFitness Test ProceduresFelicity CabreraNoch keine Bewertungen
- Module 5 Ballroom Dance For FitnessDokument19 SeitenModule 5 Ballroom Dance For FitnessArabella FabonNoch keine Bewertungen
- Bow HopeDokument1 SeiteBow HopeJay CarpioNoch keine Bewertungen
- Presentation: Like/love + Noun or - Ing FormDokument2 SeitenPresentation: Like/love + Noun or - Ing FormKaren GimezNoch keine Bewertungen
- Galaw Pilinas NarrativeDokument3 SeitenGalaw Pilinas NarrativeTron Virtudazo CalvoNoch keine Bewertungen
- ACSMs Exercise Testing Prescription PDFDokument6 SeitenACSMs Exercise Testing Prescription PDFHARIZNoch keine Bewertungen
- LES MILLS THE TRIP 17 (THETRIP17ChoreographyNotes Row en App Print PDFDokument13 SeitenLES MILLS THE TRIP 17 (THETRIP17ChoreographyNotes Row en App Print PDFDavid PulidoNoch keine Bewertungen
- 30day Dumbell v3Dokument21 Seiten30day Dumbell v3Dung Nhat100% (1)
- Derived Position: Prepared by Sajida MazharDokument58 SeitenDerived Position: Prepared by Sajida MazharAmbreena RasoolNoch keine Bewertungen
- PtstudyguideDokument1 SeitePtstudyguideANUJANoch keine Bewertungen
- Activity/ Practicum Guidelines For Pathfit - 2: Isabela State UniversityDokument2 SeitenActivity/ Practicum Guidelines For Pathfit - 2: Isabela State UniversityDanilo CuntapayNoch keine Bewertungen
- Significance of Exercise To Grade 12 Students of Bognuyan National High School, SCHOOL YEAR 2018-2019Dokument25 SeitenSignificance of Exercise To Grade 12 Students of Bognuyan National High School, SCHOOL YEAR 2018-2019Lyna LingaNoch keine Bewertungen
- GPPAQ - PDF Version PDFDokument1 SeiteGPPAQ - PDF Version PDFastrimillianiNoch keine Bewertungen
- Peh2 2ND Sem Notes.Dokument4 SeitenPeh2 2ND Sem Notes.Shane Ople ArdinaNoch keine Bewertungen
- Module One Wellness Plan: GO TO FILE - Choose SAVE AS - Save A Copy of This To Your Computer!Dokument9 SeitenModule One Wellness Plan: GO TO FILE - Choose SAVE AS - Save A Copy of This To Your Computer!Nathaniel JacomeNoch keine Bewertungen
- BLC - Endurance and Mobility EvaluationDokument2 SeitenBLC - Endurance and Mobility EvaluationKay SuNoch keine Bewertungen
- Introductory Material:: Physical Education Lesson Plan TemplateDokument5 SeitenIntroductory Material:: Physical Education Lesson Plan Templateapi-541218856Noch keine Bewertungen
- Unit 3 Ielts Speaking Part 1 Busy BenefitDokument3 SeitenUnit 3 Ielts Speaking Part 1 Busy BenefitAndrea AnneNoch keine Bewertungen
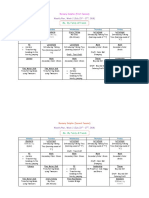
- Beginner BNF Yoga CalendarDokument1 SeiteBeginner BNF Yoga Calendard swanNoch keine Bewertungen
- Bill Starr - Q&A (Power Clean)Dokument4 SeitenBill Starr - Q&A (Power Clean)TomSusNoch keine Bewertungen
- Lower Body Progressions and Pregressions: Learning ObjectivesDokument25 SeitenLower Body Progressions and Pregressions: Learning Objectivesmaurice86Noch keine Bewertungen
- Jeremy BuendiaDokument3 SeitenJeremy Buendiaronak jainNoch keine Bewertungen
- Yoga Poses To Relieve Lower Back PainDokument3 SeitenYoga Poses To Relieve Lower Back PainDivyaYoga InstituteNoch keine Bewertungen
- Shaolin YogaDokument8 SeitenShaolin YogaTest4D100% (3)
- Capitalization 2Dokument6 SeitenCapitalization 2putriNoch keine Bewertungen
- Z-Health - Level 1 Neural Warm-UpDokument35 SeitenZ-Health - Level 1 Neural Warm-Upmihaib2007100% (8)
- Physical Education and Health 12Dokument34 SeitenPhysical Education and Health 12Vitalicio R MarcNoch keine Bewertungen