Das könnte Ihnen auch gefallen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsVon EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNoch keine Bewertungen
- Problems and SolutionsDokument13 SeitenProblems and SolutionsJason ChiangNoch keine Bewertungen
- Lipschitz ConditionDokument9 SeitenLipschitz ConditionNuwan ScofieldNoch keine Bewertungen
- Week 6 and Week 7Dokument39 SeitenWeek 6 and Week 7VicNoch keine Bewertungen
- Clase 3 Calculo Numerico II - PGRA - 2024 - 1Dokument41 SeitenClase 3 Calculo Numerico II - PGRA - 2024 - 1botametunosegaNoch keine Bewertungen
- DawdawdDokument6 SeitenDawdawdKharolina BautistaNoch keine Bewertungen
- Iterative Methods For Solving Linear Systems of EquationsDokument13 SeitenIterative Methods For Solving Linear Systems of EquationsPiyush KumarNoch keine Bewertungen
- Tute SignalsDokument12 SeitenTute SignalsNikhil KumNoch keine Bewertungen
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dokument17 SeitenLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatNoch keine Bewertungen
- 10.1007@s11785 019 00924 ZDokument19 Seiten10.1007@s11785 019 00924 ZKarwan JwamerNoch keine Bewertungen
- Differnetial Equation Cheat SheetDokument5 SeitenDiffernetial Equation Cheat SheetDebayan Dasgupta100% (5)
- MITRES 6 008S11 Lec02Dokument8 SeitenMITRES 6 008S11 Lec02vackyvipinNoch keine Bewertungen
- Advanced and Multivariable Control February 14, 2020: Exercise 1Dokument3 SeitenAdvanced and Multivariable Control February 14, 2020: Exercise 1Gianluca CastrinesiNoch keine Bewertungen
- ch4 KFderivDokument22 Seitench4 KFderivaleksandarpmauNoch keine Bewertungen
- A Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsDokument23 SeitenA Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsAntmel Rodriguez CabralNoch keine Bewertungen
- wk01 FunctionsDokument141 Seitenwk01 FunctionsUnknownsNoch keine Bewertungen
- Jacobi EDODokument10 SeitenJacobi EDOJhon Edison Bravo BuitragoNoch keine Bewertungen
- Ps 4 SolDokument23 SeitenPs 4 SolEmNoch keine Bewertungen
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Dokument10 SeitenExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNoch keine Bewertungen
- 10 - Lecture Note 09 - Numerical Solution ODE PDFDokument8 Seiten10 - Lecture Note 09 - Numerical Solution ODE PDFSalam Daeng BengoNoch keine Bewertungen
- Ordinary Differential EquationsDokument20 SeitenOrdinary Differential EquationsTony HerrysNoch keine Bewertungen
- Course 18.327 and 1.130 Wavelets and Filter BanksDokument13 SeitenCourse 18.327 and 1.130 Wavelets and Filter Banksdjoseph_1Noch keine Bewertungen
- Scan Converting EllipseDokument42 SeitenScan Converting EllipseKashish Kansal67% (3)
- Numerical Methods For Second Order Differential EquationDokument15 SeitenNumerical Methods For Second Order Differential Equationfarshan296015Noch keine Bewertungen
- Ps 9Dokument3 SeitenPs 9Red Russian47Noch keine Bewertungen
- Computer Aided Power System Analysis Inst. DR - Weerakorn OngsakulDokument12 SeitenComputer Aided Power System Analysis Inst. DR - Weerakorn OngsakulKrish DahNoch keine Bewertungen
- Examples NLSDokument5 SeitenExamples NLSKirti Deo MishraNoch keine Bewertungen
- Crtanje Faznog PortretaDokument7 SeitenCrtanje Faznog Portretafeniks5Noch keine Bewertungen
- Runge Kutta MethodDokument33 SeitenRunge Kutta MethodHemangi Priya Devi Dasi100% (1)
- Chapter 1Dokument10 SeitenChapter 1sadiksnmNoch keine Bewertungen
- Yogesh Meena (BCA-M15 4th SEM) CONM CCEDokument10 SeitenYogesh Meena (BCA-M15 4th SEM) CONM CCEYogesh MeenaNoch keine Bewertungen
- Solutions of Gauss'S Hypergeometric Equation, Leguerre'S Equation by Differential Transform MethodDokument7 SeitenSolutions of Gauss'S Hypergeometric Equation, Leguerre'S Equation by Differential Transform MethodUmer Sayyab KhalidNoch keine Bewertungen
- Newton Rhapson MethodDokument3 SeitenNewton Rhapson Methodram_108Noch keine Bewertungen
- (Rosenberger, 1997) - Functional Analysis Introduction To Spectral Theory in Hilbert SpacesDokument62 Seiten(Rosenberger, 1997) - Functional Analysis Introduction To Spectral Theory in Hilbert SpacesclearcastingNoch keine Bewertungen
- Simple Quadrature For Singular Integral Equations With Variable Coe CientsDokument20 SeitenSimple Quadrature For Singular Integral Equations With Variable Coe CientsGloomsyNoch keine Bewertungen
- Solutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringDokument21 SeitenSolutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringTri Phương NguyễnNoch keine Bewertungen
- 4curve Fitting TechniquesDokument32 Seiten4curve Fitting TechniquesSubhankarGangulyNoch keine Bewertungen
- Solution Exercises 2011 PartIDokument27 SeitenSolution Exercises 2011 PartIcecch001100% (1)
- Assignment 1Dokument18 SeitenAssignment 1Rubayet ShafinNoch keine Bewertungen
- Lecture # 3 Derivative of Polynomials and Exponential Functions Dr. Ghada AbdelhadyDokument32 SeitenLecture # 3 Derivative of Polynomials and Exponential Functions Dr. Ghada AbdelhadyEsraa AhmadNoch keine Bewertungen
- (515369542) ch-11Dokument13 Seiten(515369542) ch-11Anshul GroverNoch keine Bewertungen
- Analytical - FinalDokument10 SeitenAnalytical - FinalHayder AlsarajNoch keine Bewertungen
- Vibrations of StructuresDokument9 SeitenVibrations of StructuresRafaAlmeidaNoch keine Bewertungen
- Quantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Dokument7 SeitenQuantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Ale GomezNoch keine Bewertungen
- 3.4 Numerical Solution of Differential EquationsDokument21 Seiten3.4 Numerical Solution of Differential EquationsKhairulNoch keine Bewertungen
- 1803Dokument254 Seiten1803dinhanhminhqtNoch keine Bewertungen
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Dokument5 SeitenWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiNoch keine Bewertungen
- Ordinary Differential Equations OdesDokument25 SeitenOrdinary Differential Equations OdesDeepshikhaSinghNoch keine Bewertungen
- 08 TargonskiiDokument13 Seiten08 TargonskiiandrejmokreckijNoch keine Bewertungen
- Kuliah1 2015Dokument36 SeitenKuliah1 2015wiraNoch keine Bewertungen
- 15.1 Dynamic OptimizationDokument32 Seiten15.1 Dynamic OptimizationDaniel Lee Eisenberg JacobsNoch keine Bewertungen
- Functions Several Variables: CH 7-OfDokument56 SeitenFunctions Several Variables: CH 7-Oflzyabc597Noch keine Bewertungen
- Lesson 5 For AeronauticalDokument28 SeitenLesson 5 For AeronauticalprannenbatraNoch keine Bewertungen
- 12 OD Nonlinear Programming B-2008-2Dokument6 Seiten12 OD Nonlinear Programming B-2008-2carolinarvsocnNoch keine Bewertungen
- Slides Control System 2Dokument13 SeitenSlides Control System 2Eric GardnerNoch keine Bewertungen
- Transformation of Axes (Geometry) Mathematics Question BankVon EverandTransformation of Axes (Geometry) Mathematics Question BankBewertung: 3 von 5 Sternen3/5 (1)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
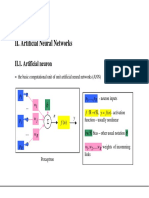
- II. Artificial Neural NetworksDokument73 SeitenII. Artificial Neural NetworksEduard Cosmin UngureanuNoch keine Bewertungen
- Renting ContractDokument4 SeitenRenting ContractEduard Cosmin Ungureanu100% (1)
- His GaDokument125 SeitenHis GaEduard Cosmin UngureanuNoch keine Bewertungen
- C10 To C12Dokument18 SeitenC10 To C12Eduard Cosmin UngureanuNoch keine Bewertungen
- III. Fourier Series and Fourier TransformDokument20 SeitenIII. Fourier Series and Fourier TransformEduard Cosmin UngureanuNoch keine Bewertungen
- Edcom Corporation Coming Up On 1 of March 2012!Dokument1 SeiteEdcom Corporation Coming Up On 1 of March 2012!Eduard Cosmin UngureanuNoch keine Bewertungen
- Edcom Corporation Website Is Coming Up!Dokument1 SeiteEdcom Corporation Website Is Coming Up!Eduard Cosmin UngureanuNoch keine Bewertungen
- Edcom Corporation Official Release: 6 February 2012! Trust Me!!!Dokument1 SeiteEdcom Corporation Official Release: 6 February 2012! Trust Me!!!Eduard Cosmin UngureanuNoch keine Bewertungen
- Solving Logarithmic Equations: General MathematicsDokument40 SeitenSolving Logarithmic Equations: General MathematicsDamDamNoch keine Bewertungen
- Differential Equation II MathDokument3 SeitenDifferential Equation II MathRafid ShidqiNoch keine Bewertungen
- OdeDokument47 SeitenOdeReiniel AllanicNoch keine Bewertungen
- QUICK SchemeDokument25 SeitenQUICK SchemeMesutÖzilNoch keine Bewertungen
- E Games g8 Linear InequalitiesDokument14 SeitenE Games g8 Linear InequalitiesFloating GuruNoch keine Bewertungen
- Ordinary Differential EquationsDokument9 SeitenOrdinary Differential EquationsAllan Mugisha100% (2)
- Mechanical Vibrations Tutorial 1Dokument3 SeitenMechanical Vibrations Tutorial 1thelightrayNoch keine Bewertungen
- Solving Linear Systems (Elimination)Dokument9 SeitenSolving Linear Systems (Elimination)Cathlyn Domingo MadambaNoch keine Bewertungen
- Differential Equations HW1Dokument2 SeitenDifferential Equations HW1Peter Simon SantosNoch keine Bewertungen
- s06 PDFDokument3 Seitens06 PDFLucas LanzaNoch keine Bewertungen
- Unit - 1 Microwave Waveguide and ComponentsDokument35 SeitenUnit - 1 Microwave Waveguide and ComponentsgeetaNoch keine Bewertungen
- Runge-Kutta Rao-Mechanical VibrationsDokument4 SeitenRunge-Kutta Rao-Mechanical VibrationsSaulo Marcondes de MouraNoch keine Bewertungen
- Learning Activity Sheet in Mathematics: Steps in Solving Quadratic Equations by FactoringDokument2 SeitenLearning Activity Sheet in Mathematics: Steps in Solving Quadratic Equations by FactoringVince BonosNoch keine Bewertungen
- Simple Equations NotesDokument3 SeitenSimple Equations NotesMidhun Bhuvanesh.B 7ANoch keine Bewertungen
- Algebra WorksheetDokument3 SeitenAlgebra WorksheetRàyśhørńę ŚtëwårtNoch keine Bewertungen
- GEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Dokument54 SeitenGEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Benedict HounsinouNoch keine Bewertungen
- SLG M2 1.6.1 Two-Point-FormDokument9 SeitenSLG M2 1.6.1 Two-Point-FormSharlyn BalgoaNoch keine Bewertungen
- Basics of Differential EquationsDokument22 SeitenBasics of Differential EquationsJeramie CanoNoch keine Bewertungen
- MS327 SyllabusDokument1 SeiteMS327 SyllabuspratNoch keine Bewertungen
- Hibbeler S14 e CH 2 P 56Dokument2 SeitenHibbeler S14 e CH 2 P 56Peewee DelightNoch keine Bewertungen
- RS Aggarwal Class 11 MathsDokument17 SeitenRS Aggarwal Class 11 MathsSarojini MallickNoch keine Bewertungen
- Homework 2: SOLUTIONS: Drexel University Office of The Dean of The College of EngineeringDokument16 SeitenHomework 2: SOLUTIONS: Drexel University Office of The Dean of The College of EngineeringNadim AminNoch keine Bewertungen
- Partial Differential EquationsDokument10 SeitenPartial Differential EquationsBogdan Carauleanu100% (1)
- U I Pelajarle: Kertas Soalan Latiht B Untuk MahDokument8 SeitenU I Pelajarle: Kertas Soalan Latiht B Untuk Mahysheng98Noch keine Bewertungen
- Assignment 4 SolutionsDokument5 SeitenAssignment 4 Solutionshlove1Noch keine Bewertungen
- Solucionario WadeDokument3 SeitenSolucionario WadeReginaCortesRamirezNoch keine Bewertungen
- One Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Dokument24 SeitenOne Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Level ThreeNoch keine Bewertungen
- Ordinary Differential Equations (Lecture Notes) - Peter PhilipDokument167 SeitenOrdinary Differential Equations (Lecture Notes) - Peter Philipvic12340590% (1)
- MODULE - I Numerical MethodsDokument3 SeitenMODULE - I Numerical MethodsHarsha KasaragodNoch keine Bewertungen