Das könnte Ihnen auch gefallen
- Answers To Review QuestionsDokument49 SeitenAnswers To Review QuestionsAfzalZubir85% (13)
- VibrationsDokument93 SeitenVibrationsbislerinit86% (7)
- Mechanical Engineering Department Mechanical Vibration (Met-351) Tutorial 1Dokument15 SeitenMechanical Engineering Department Mechanical Vibration (Met-351) Tutorial 1Aakash SinglaNoch keine Bewertungen
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyVon EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyBewertung: 3 von 5 Sternen3/5 (2)
- AE PHD SummaryDokument3 SeitenAE PHD SummaryNumkang KangNoch keine Bewertungen
- Postfile 14968Dokument34 SeitenPostfile 14968Ali SafdarNoch keine Bewertungen
- PPT.@1Dokument106 SeitenPPT.@1Cj SiguenzaNoch keine Bewertungen
- Vibration Chapter01-EditedDokument101 SeitenVibration Chapter01-EditedMuhammad Ibrahim IsahNoch keine Bewertungen
- Vibration Fundamental - BasicDokument109 SeitenVibration Fundamental - Basicpersonalmail_20011078Noch keine Bewertungen
- Vibration Chapter01 Edited STDDokument23 SeitenVibration Chapter01 Edited STDEiyba AdibahNoch keine Bewertungen
- Dynamic Force Analysis & Vibration in Machines Workshop at KauveryDokument132 SeitenDynamic Force Analysis & Vibration in Machines Workshop at KauveryMoorthy GovindarajNoch keine Bewertungen
- SDOFDokument107 SeitenSDOFMohammed B TuseNoch keine Bewertungen
- Aerospace Structural Dynamics: ContentDokument7 SeitenAerospace Structural Dynamics: ContentPrashanth Babu.KNoch keine Bewertungen
- Mechanical Vibration: Course InstructorsDokument26 SeitenMechanical Vibration: Course Instructorspavan_1988Noch keine Bewertungen
- NPTEL - Mechanical Engineering - Vibration ControlDokument10 SeitenNPTEL - Mechanical Engineering - Vibration Control8104772799Noch keine Bewertungen
- CH 1Dokument155 SeitenCH 1f112142112Noch keine Bewertungen
- Vibration of Elastic Systems FundamentalsDokument45 SeitenVibration of Elastic Systems FundamentalsMD SHAHRIARMAHMUDNoch keine Bewertungen
- Fundamentals of Vibration ExplainedDokument102 SeitenFundamentals of Vibration ExplainedKoteswara RaoNoch keine Bewertungen
- MMAN2300 VibrationDokument22 SeitenMMAN2300 VibrationAl Chemist ShahedNoch keine Bewertungen
- CH 01, Introduction To Mechanical VibrationsDokument35 SeitenCH 01, Introduction To Mechanical VibrationsAtalelew ZeruNoch keine Bewertungen
- Mechanical Vibrations-1Dokument22 SeitenMechanical Vibrations-1Omar ShadyNoch keine Bewertungen
- Learning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsDokument9 SeitenLearning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsOluwajuwon AdenugbaNoch keine Bewertungen
- Transient Vibration Is Defined As A Temporarily Sustained Vibration of ADokument6 SeitenTransient Vibration Is Defined As A Temporarily Sustained Vibration of AsdfohfsioHNoch keine Bewertungen
- Vibrations SyllabusDokument5 SeitenVibrations SyllabusAli SabahNoch keine Bewertungen
- Mechanical Vibrations Week 1Dokument57 SeitenMechanical Vibrations Week 1mrb87Noch keine Bewertungen
- The Shock Response Spectrum - A PrimerDokument23 SeitenThe Shock Response Spectrum - A Primerjack100% (1)
- Finalppt 141214102413 Conversion Gate01Dokument45 SeitenFinalppt 141214102413 Conversion Gate01manat_swuNoch keine Bewertungen
- Determine Natural Frequency of Spring-Dashpot SystemDokument21 SeitenDetermine Natural Frequency of Spring-Dashpot SystemneenoonaaNoch keine Bewertungen
- Introduction to Shock & Vibration FundamentalsDokument34 SeitenIntroduction to Shock & Vibration Fundamentalskostarica123100% (1)
- Mechanical Vibration: Eng DR Aravinda AbeygunawardaneDokument26 SeitenMechanical Vibration: Eng DR Aravinda AbeygunawardaneRashen DilNoch keine Bewertungen
- Lab ReportDokument10 SeitenLab Reportajay shresthaNoch keine Bewertungen
- Dynamic Vibration AbsorberDokument6 SeitenDynamic Vibration AbsorberCANGONoch keine Bewertungen
- A2 H 41c Shm&oscillationsDokument38 SeitenA2 H 41c Shm&oscillationsHany ElGezawyNoch keine Bewertungen
- Two-Degree Freedom Systems AnalysisDokument122 SeitenTwo-Degree Freedom Systems AnalysiswanpudinNoch keine Bewertungen
- اهتزازاتDokument31 SeitenاهتزازاتMoataz AlorfeNoch keine Bewertungen
- Mechanic Experi̇mentsDokument26 SeitenMechanic Experi̇mentsCANGONoch keine Bewertungen
- Unless Otherwise Noted, The Content of This Course Material Is Licensed Under A Creative Commons BY 3.0 LicenseDokument20 SeitenUnless Otherwise Noted, The Content of This Course Material Is Licensed Under A Creative Commons BY 3.0 LicenseAsif AliNoch keine Bewertungen
- Emir Can Yılmaz 200304052 DYNAMIC VIBRATION ABSORBERDokument6 SeitenEmir Can Yılmaz 200304052 DYNAMIC VIBRATION ABSORBERCANGONoch keine Bewertungen
- College of Technology - Riyadh: Kingdom of Saudi ArabiaDokument87 SeitenCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDokument14 Seiten02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- Vibration Theory: Periodic MotionDokument9 SeitenVibration Theory: Periodic MotionVasile RaduNoch keine Bewertungen
- My Practical ReportDokument11 SeitenMy Practical Reportironmyan18Noch keine Bewertungen
- VIV - GabrielDokument34 SeitenVIV - GabrielGabriel GonzalezNoch keine Bewertungen
- Mechanical Vibration IDokument37 SeitenMechanical Vibration IMohamed MaherNoch keine Bewertungen
- Vibration Analysis and Control Exam QuestionsDokument4 SeitenVibration Analysis and Control Exam QuestionsAshokNoch keine Bewertungen
- Structural Dynamics and Earthquake EngineeringDokument76 SeitenStructural Dynamics and Earthquake EngineeringGerman ToledoNoch keine Bewertungen
- Intro VibrationDokument61 SeitenIntro VibrationSameer ShashwatNoch keine Bewertungen
- Vibration Analysis of Multi-Storey Building: A Project ReportDokument12 SeitenVibration Analysis of Multi-Storey Building: A Project ReportShrinivas ReddyNoch keine Bewertungen
- TMP-712 Presentation - Farm Machinery DyamicsDokument70 SeitenTMP-712 Presentation - Farm Machinery DyamicsVishnu Ji AwasthiNoch keine Bewertungen
- Vibration and Engineering Design: (Perspective of A Mechanical Engineer Working in Vibration Related Problems)Dokument50 SeitenVibration and Engineering Design: (Perspective of A Mechanical Engineer Working in Vibration Related Problems)rough_rushNoch keine Bewertungen
- Vibration of Single Degree Freedom SystemsDokument21 SeitenVibration of Single Degree Freedom SystemsmaheshluintelNoch keine Bewertungen
- The Purpose of My Talk Today Is: ObjectiveDokument70 SeitenThe Purpose of My Talk Today Is: ObjectivefamilyumaNoch keine Bewertungen
- Freeund 2Dokument5 SeitenFreeund 2Fahmi Fazlur RahmanNoch keine Bewertungen
- Shock Response Spectrum PrimerDokument9 SeitenShock Response Spectrum PrimerAngelo De Dominicis100% (1)
- Mechanical Vibration Lecture 1Dokument40 SeitenMechanical Vibration Lecture 1Mohamed HamedNoch keine Bewertungen
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Von EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Noch keine Bewertungen
- New Directions in Dynamical Systems, Automatic Control and Singular PerturbationsVon EverandNew Directions in Dynamical Systems, Automatic Control and Singular PerturbationsNoch keine Bewertungen
- Advanced Theoretical Mechanics: A Course of Mathematics for Engineers and ScientistsVon EverandAdvanced Theoretical Mechanics: A Course of Mathematics for Engineers and ScientistsNoch keine Bewertungen
- Introduction to Physics: Mechanics, Hydrodynamics ThermodynamicsVon EverandIntroduction to Physics: Mechanics, Hydrodynamics ThermodynamicsNoch keine Bewertungen
- MainDokument8 SeitenMainNumkang KangNoch keine Bewertungen
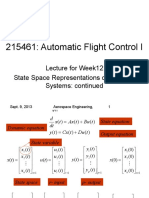
- Automatic Flight Control State Space ModelsDokument73 SeitenAutomatic Flight Control State Space ModelsNumkang KangNoch keine Bewertungen
- AE PHD SummaryDokument1 SeiteAE PHD SummaryNumkang KangNoch keine Bewertungen
- Syl Lab Us 2557Dokument3 SeitenSyl Lab Us 2557Numkang KangNoch keine Bewertungen
- Advances in Flight Control SystemsDokument310 SeitenAdvances in Flight Control SystemsNumkang KangNoch keine Bewertungen
- AE PHD SummaryDokument1 SeiteAE PHD SummaryNumkang KangNoch keine Bewertungen
- Syllabus AE3530Dokument5 SeitenSyllabus AE3530Numkang KangNoch keine Bewertungen
- Matrixcookbook PDFDokument72 SeitenMatrixcookbook PDFeetahaNoch keine Bewertungen
- Brachistochrone ProblemIPOPTinfoDokument2 SeitenBrachistochrone ProblemIPOPTinfoNumkang KangNoch keine Bewertungen
- Drivers Drivers Drivers: G D D SDokument60 SeitenDrivers Drivers Drivers: G D D SNumkang KangNoch keine Bewertungen
- Syl Lab Us 2014Dokument3 SeitenSyl Lab Us 2014Numkang KangNoch keine Bewertungen
- Fuligin Pokemon LocationsDokument27 SeitenFuligin Pokemon LocationsKelly SchneiderNoch keine Bewertungen
- AE PHD SummaryDokument1 SeiteAE PHD SummaryNumkang KangNoch keine Bewertungen
- Bus ScheduleDokument3 SeitenBus ScheduleNumkang KangNoch keine Bewertungen
- 02 1 AirfoilDokument28 Seiten02 1 AirfoilNumkang KangNoch keine Bewertungen
- A Quick Guide To CATIA SetupDokument1 SeiteA Quick Guide To CATIA SetupNumkang KangNoch keine Bewertungen
- Lecturewk01&2Dokument14 SeitenLecturewk01&2Numkang KangNoch keine Bewertungen
- Lecture12 13Dokument28 SeitenLecture12 13Numkang KangNoch keine Bewertungen
- Slide MatlabDokument41 SeitenSlide MatlabNumkang KangNoch keine Bewertungen
- Lecturewk03 PDFDokument21 SeitenLecturewk03 PDFNumkang KangNoch keine Bewertungen
- Lecture14-15 2014Dokument15 SeitenLecture14-15 2014Numkang KangNoch keine Bewertungen
- Aircraft Vibration Videos: Second Semester, 2014 (2557)Dokument11 SeitenAircraft Vibration Videos: Second Semester, 2014 (2557)Numkang KangNoch keine Bewertungen
- Syl Lab Us 2014Dokument3 SeitenSyl Lab Us 2014Numkang KangNoch keine Bewertungen
- Syl Lab Us 2014Dokument3 SeitenSyl Lab Us 2014Numkang KangNoch keine Bewertungen
- 2 Free Vibration: Any System Possessing Mass and Elasticity Is Capable of VibrationDokument11 Seiten2 Free Vibration: Any System Possessing Mass and Elasticity Is Capable of VibrationNumkang KangNoch keine Bewertungen
- Aircraft Vibration Videos: Second Semester, 2014 (2557)Dokument11 SeitenAircraft Vibration Videos: Second Semester, 2014 (2557)Numkang KangNoch keine Bewertungen
- 2 Free Vibration: Any System Possessing Mass and Elasticity Is Capable of VibrationDokument11 Seiten2 Free Vibration: Any System Possessing Mass and Elasticity Is Capable of VibrationNumkang KangNoch keine Bewertungen
- Treating Crude Oil With Dielectric TechniquesDokument6 SeitenTreating Crude Oil With Dielectric Techniquesaznan fatkurezaNoch keine Bewertungen
- Newton and The Mechanical Philosophy PDFDokument19 SeitenNewton and The Mechanical Philosophy PDFdavid199415Noch keine Bewertungen
- Unit One: Wind LoadsDokument67 SeitenUnit One: Wind Loadsabdu yimerNoch keine Bewertungen
- Sway and Roll Motion of A BuoyDokument18 SeitenSway and Roll Motion of A BuoyRupesh KumarNoch keine Bewertungen
- Calculating WeightDokument1 SeiteCalculating WeightMăndița BaiasNoch keine Bewertungen
- On Load Tap ChangerDokument22 SeitenOn Load Tap Changersushil6719Noch keine Bewertungen
- Reyes Exp2 PDFDokument9 SeitenReyes Exp2 PDFHero CourseNoch keine Bewertungen
- Undervoltage Relay SUD142Dokument2 SeitenUndervoltage Relay SUD142Ruben Garcia DieguezNoch keine Bewertungen
- Sir Isaac Newton'S de Gravitatione Et Aequipondio Fluidorum: Translated by W. B. AllenDokument24 SeitenSir Isaac Newton'S de Gravitatione Et Aequipondio Fluidorum: Translated by W. B. AllenGabrielNoch keine Bewertungen
- Spillway DesignDokument6 SeitenSpillway DesignguildkeyNoch keine Bewertungen
- CBSE Class X Electricity Practice TestDokument2 SeitenCBSE Class X Electricity Practice TestThomas CherianNoch keine Bewertungen
- Rockets and Missiles - The Life Story of A TechnologyDokument194 SeitenRockets and Missiles - The Life Story of A TechnologyAshrafAzuasNoch keine Bewertungen
- Sensors and Basic Sensing Applications: EE313-Experiment#4Dokument7 SeitenSensors and Basic Sensing Applications: EE313-Experiment#4Shaikh Usman AiNoch keine Bewertungen
- Pnu NatSciDokument6 SeitenPnu NatSciDianne S. GarciaNoch keine Bewertungen
- 淺談光電同調控制( Coherent Control )的視 野在物理與化學應用上可能帶來之新影響Dokument55 Seiten淺談光電同調控制( Coherent Control )的視 野在物理與化學應用上可能帶來之新影響Hovering BC LiaoNoch keine Bewertungen
- Coriolis Force Mass Flow Measurement DevicesDokument12 SeitenCoriolis Force Mass Flow Measurement DevicesCurso DeinglesefNoch keine Bewertungen
- Science1 PDFDokument20 SeitenScience1 PDFFact HubzNoch keine Bewertungen
- Science8 Q1 Wk3Dokument6 SeitenScience8 Q1 Wk3Aizelle Taratara FaderoNoch keine Bewertungen
- Sizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDokument7 SeitenSizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDizky Christian HadiNoch keine Bewertungen
- Solid State Motor ControDokument22 SeitenSolid State Motor ControJesse Jones SeraspeNoch keine Bewertungen
- Washing Machine PartsDokument57 SeitenWashing Machine PartsNashrullah Guro Ambolodto100% (4)
- Elpro 23bpt GBDokument6 SeitenElpro 23bpt GBTerryAdamsNoch keine Bewertungen
- Nonconvergence in Caesar in Caesar IIDokument11 SeitenNonconvergence in Caesar in Caesar IIviv0102Noch keine Bewertungen
- 11 Physics Eng PP 2023 24 2Dokument9 Seiten11 Physics Eng PP 2023 24 2guptadeepka168100% (2)
- PT GenPhysics Mock ExamDokument9 SeitenPT GenPhysics Mock ExamBroderich ObachNoch keine Bewertungen
- Resonant Induction Heater PDFDokument225 SeitenResonant Induction Heater PDFBoodyBedaiweNoch keine Bewertungen
- Eddy Current DrivesDokument36 SeitenEddy Current DrivesBenedict EromoseleNoch keine Bewertungen
- 04-06-2020 - SR - LT - All - All INDIA - E-Test Series - Jee Main - MFT-02 - Question Paper (djlkjKJDIDNWD HJ)Dokument19 Seiten04-06-2020 - SR - LT - All - All INDIA - E-Test Series - Jee Main - MFT-02 - Question Paper (djlkjKJDIDNWD HJ)Sai GokulNoch keine Bewertungen
- Transformer Design For SMPSDokument6 SeitenTransformer Design For SMPSKiran Raghuram IyengarNoch keine Bewertungen
- Load Model Effects On Distance Relay SettingsDokument7 SeitenLoad Model Effects On Distance Relay Settingskelly Johana ossa GiraldoNoch keine Bewertungen