Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
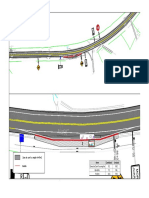
- CivilReport Algnment CurveDokument5 SeitenCivilReport Algnment CurveMario SeguraNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hydraulic Excavator: Engine WeightsDokument28 SeitenHydraulic Excavator: Engine WeightsMario SeguraNoch keine Bewertungen
- Aruba Netherlands Antilles: Mar CaribeDokument1 SeiteAruba Netherlands Antilles: Mar CaribeMario SeguraNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- LluviaMax24hPR20 MapaDokument1 SeiteLluviaMax24hPR20 MapaMario SeguraNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Work Zone Queue Length & Delay Methodology (10-0112)Dokument18 SeitenWork Zone Queue Length & Delay Methodology (10-0112)Mario SeguraNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Guidelines Selection of Pedestrian Facilities PDFDokument30 SeitenGuidelines Selection of Pedestrian Facilities PDFMario SeguraNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Flexibility: A Guide For Achieving in Highway DesignDokument14 SeitenFlexibility: A Guide For Achieving in Highway DesignMario SeguraNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Vol3 - Guidelines For Applying Microsimulaton PDFDokument146 SeitenVol3 - Guidelines For Applying Microsimulaton PDFMario SeguraNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Delays at Freeway Work ZonesDokument31 SeitenDelays at Freeway Work ZonesMario SeguraNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Work Zone Analysis-A Guide For Decision-MakersDokument40 SeitenWork Zone Analysis-A Guide For Decision-MakersMario SeguraNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 3259r 91 PDFDokument27 Seiten3259r 91 PDFMario SeguraNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Morro Juaruco: PR 85+800 PR 85+900 PR 86+000Dokument3 SeitenMorro Juaruco: PR 85+800 PR 85+900 PR 86+000Mario SeguraNoch keine Bewertungen
- Effect of Site and Population Characteristics On Freeway Bottleneck CapacityDokument16 SeitenEffect of Site and Population Characteristics On Freeway Bottleneck CapacityMario SeguraNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Al-Kaisy Et Al. 2001Dokument8 SeitenAl-Kaisy Et Al. 2001Mario SeguraNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Pcu PDFDokument6 SeitenPcu PDFMario SeguraNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Arguea DDokument127 SeitenArguea DMario SeguraNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Dixon Et Al. 1996Dokument8 SeitenDixon Et Al. 1996Mario SeguraNoch keine Bewertungen
- Yu Gao Thesis PDFDokument67 SeitenYu Gao Thesis PDFwrymerNoch keine Bewertungen
- CTS2014 10Dokument112 SeitenCTS2014 10Mario SeguraNoch keine Bewertungen
- Chapter Vanwee PDFDokument35 SeitenChapter Vanwee PDFMario SeguraNoch keine Bewertungen
- 07404-Work Zone Lane Closure Analysis ModelDokument105 Seiten07404-Work Zone Lane Closure Analysis ModelMario SeguraNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Vanas Queuing (2004)Dokument12 SeitenVanas Queuing (2004)Mario SeguraNoch keine Bewertungen
- Chapter Vanwee PDFDokument35 SeitenChapter Vanwee PDFMario SeguraNoch keine Bewertungen
- Traffic Flow FundamentalsDokument473 SeitenTraffic Flow Fundamentalsbatistathegame90% (10)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Catalog FibaroDokument40 SeitenCatalog FibaroMario SeguraNoch keine Bewertungen
- Thesis Eng-Alat Berat CaterpillarDokument176 SeitenThesis Eng-Alat Berat CaterpillarGaming BebasNoch keine Bewertungen
- Dcc30112 Geotechnical and Highway Engineering Laboratory: Clo 1 P3 DK6 DP1, DP4 DK6Dokument5 SeitenDcc30112 Geotechnical and Highway Engineering Laboratory: Clo 1 P3 DK6 DP1, DP4 DK6muhammad nur imanNoch keine Bewertungen
- Werling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FrameDokument8 SeitenWerling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FramehugoNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- LectDokument18 SeitenLectbakhtiar Al-BarzinjiNoch keine Bewertungen
- Traffic Engineering TestDokument2 SeitenTraffic Engineering TestIbukunoluwa Aborisade ErunkuluNoch keine Bewertungen
- 5 6165705018340016232Dokument6 Seiten5 6165705018340016232Subh sNoch keine Bewertungen
- TPTM 6350: Strategic Transport Modelling Semester 2, 2012Dokument21 SeitenTPTM 6350: Strategic Transport Modelling Semester 2, 2012Sahil BhatiaNoch keine Bewertungen
- Literature Review For Study of Characteristics of Traffic FlowDokument10 SeitenLiterature Review For Study of Characteristics of Traffic FlowIJRASETPublicationsNoch keine Bewertungen
- Traffic Volume StudiesDokument28 SeitenTraffic Volume StudiesAnant AgarwalNoch keine Bewertungen
- Methodology To Estimate Airport and ATC Sector CapacityDokument74 SeitenMethodology To Estimate Airport and ATC Sector CapacitycapanaoNoch keine Bewertungen
- Highway ClassificationDokument5 SeitenHighway ClassificationEngr Ijaz AliNoch keine Bewertungen
- Effect of Traffic Signals On Vehicle DelaysDokument20 SeitenEffect of Traffic Signals On Vehicle DelaysNgabirano B. JuliusNoch keine Bewertungen
- CVEN4404 Project Brief-V3-Updated 11apr2019Dokument7 SeitenCVEN4404 Project Brief-V3-Updated 11apr2019Hong J HuwuaNoch keine Bewertungen
- 2012-13 FCE545 Transptn Eng IIIADokument187 Seiten2012-13 FCE545 Transptn Eng IIIAjava nameNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sport Speed StudyDokument4 SeitenSport Speed StudyAziff ShafzanNoch keine Bewertungen
- 1 Title Page and Ol Final-CombinedDokument200 Seiten1 Title Page and Ol Final-CombinedLhord Rexfer TacogueNoch keine Bewertungen
- Chapter-7 Organization of Train OperationDokument31 SeitenChapter-7 Organization of Train OperationBabangida Gida NessreNoch keine Bewertungen
- Highway Traffic Analysis and DesignDokument7 SeitenHighway Traffic Analysis and DesignROHIT GUPTA0% (1)
- A Proposed Fly-Over Model Plan For Traffic Conundrum at Wunti Market Road Intersection, Bauchi StateDokument6 SeitenA Proposed Fly-Over Model Plan For Traffic Conundrum at Wunti Market Road Intersection, Bauchi StatebenitoNoch keine Bewertungen
- Criminology boa-WPS OfficeDokument5 SeitenCriminology boa-WPS OfficeRetchel Mae Siete MaribaoNoch keine Bewertungen
- Review Module 14 Transportation Engineering Part 1Dokument1 SeiteReview Module 14 Transportation Engineering Part 1YeddaMIlaganNoch keine Bewertungen
- JohnsonControls AdaptiveTrafficOverviewDokument13 SeitenJohnsonControls AdaptiveTrafficOverviewEgis SmartCityChdNoch keine Bewertungen
- Transportation Systems Engineering - Theory and MethodsDokument723 SeitenTransportation Systems Engineering - Theory and MethodsRita Chakraborty100% (3)
- (Research Report) Truck Turnaround Time in Customer BaseDokument59 Seiten(Research Report) Truck Turnaround Time in Customer BaseAnonymous d2ZSDE0% (3)
- De Thi Tieng Anh Lop 7 Giua Ki 2 de So 2Dokument5 SeitenDe Thi Tieng Anh Lop 7 Giua Ki 2 de So 2TÊN HỌNoch keine Bewertungen
- Traffic LightDokument12 SeitenTraffic Lightritesh chauhanNoch keine Bewertungen
- Chapter 5 Traffic Flow PDFDokument53 SeitenChapter 5 Traffic Flow PDFPresidaNoch keine Bewertungen
- Transportation Engg: Compiled By: Engr Muhammad Abbas KhanDokument9 SeitenTransportation Engg: Compiled By: Engr Muhammad Abbas KhanMuhammad Abbas KhanNoch keine Bewertungen
- Advance Transportation Management Technologies (Abridged)Dokument326 SeitenAdvance Transportation Management Technologies (Abridged)Pablo ChanNoch keine Bewertungen